You might also like
- Examples 01Document6 pagesExamples 01Mix AnimeNo ratings yet
- Report EHTC HuntingDocument10 pagesReport EHTC HuntingOTPC POWERNo ratings yet
- Tonnage CalculationDocument3 pagesTonnage CalculationEmba MadrasNo ratings yet
- Thermo Scientific Belt Conveyor Scale HandbookDocument20 pagesThermo Scientific Belt Conveyor Scale HandbookEJECUTIVO_1No ratings yet
- Mohammed Hafiz Bin Abdul Aziz U090018W Group 3F1 Formal ReportDocument8 pagesMohammed Hafiz Bin Abdul Aziz U090018W Group 3F1 Formal Reportta_daa_89No ratings yet
- 607 Switched-Capacitor S-H and SwitchesDocument34 pages607 Switched-Capacitor S-H and SwitchesPraveen AndrewNo ratings yet
- Csdyna Notes: Saturation StageDocument3 pagesCsdyna Notes: Saturation StageJonathan WhiteNo ratings yet
- Computer Implementation of Control Systems: Karl-Erik Årzen, Anton CervinDocument58 pagesComputer Implementation of Control Systems: Karl-Erik Årzen, Anton CervinnnikogNo ratings yet
- XFMRDocument74 pagesXFMRIgorNo ratings yet
- Control System Design - QFT: Bo Bernhardsson, K. J. ÅströmDocument54 pagesControl System Design - QFT: Bo Bernhardsson, K. J. ÅströmGabriel LNo ratings yet
- Term Project: PEGN 513A Reservoir SimulationDocument13 pagesTerm Project: PEGN 513A Reservoir SimulationMedet MadalimovNo ratings yet
- Transformer Test PDFDocument76 pagesTransformer Test PDFHugo Palencia100% (2)
- LAb Exp 7Document12 pagesLAb Exp 7Md Abid AfridiNo ratings yet
- 15.el Algoritmo de Control PIDDocument44 pages15.el Algoritmo de Control PIDYulieth BravoNo ratings yet
- Testing of Relays (Compatibility Mode)Document43 pagesTesting of Relays (Compatibility Mode)James BenjaminNo ratings yet
- Sampel Calculations: For Data in Row 1: 1. Head On The WeirDocument3 pagesSampel Calculations: For Data in Row 1: 1. Head On The WeirFendy RoynNo ratings yet
- 5.process ReactionCurveDocument17 pages5.process ReactionCurveANDRÉS FELIPE SOTO CUELLARNo ratings yet
- University of Negros Occidental-RecoletosDocument5 pagesUniversity of Negros Occidental-RecoletosJohn MaturanNo ratings yet
- 09 Taking Timing FurtherPIC16F877Document55 pages09 Taking Timing FurtherPIC16F877Abeeesy AmrakeyNo ratings yet
- Process ControlDocument26 pagesProcess ControlMeenaNo ratings yet
- Routing: Physical (Hydraulic) - Continuity - Momentum Conceptual (Hydrologic) - Continuity Regression (Empirical)Document71 pagesRouting: Physical (Hydraulic) - Continuity - Momentum Conceptual (Hydrologic) - Continuity Regression (Empirical)guidoxlNo ratings yet
- Ima Ima: KHZ IDocument5 pagesIma Ima: KHZ Ibhattaraikushal05No ratings yet
- Submitted by Vikrant Rana CH-6276Document30 pagesSubmitted by Vikrant Rana CH-6276vcoolkrazyNo ratings yet
- ECA 2, Lab 11,12 (Terminal), Osama Sattar, FA19-BEE-172Document28 pagesECA 2, Lab 11,12 (Terminal), Osama Sattar, FA19-BEE-172Muneeb AhmadNo ratings yet
- ME306 Lab 4Document12 pagesME306 Lab 4Himanshu BansalNo ratings yet
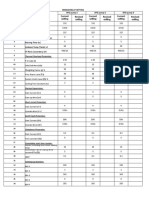
- SL - No Description Current Setting Revised Setting Current Setting Revised Setting Current Setting Revised SettingDocument15 pagesSL - No Description Current Setting Revised Setting Current Setting Revised Setting Current Setting Revised SettingPraneeth ReddyNo ratings yet
- Soil Mechanics - KNS2123: Tutorial Consolidation 2Document7 pagesSoil Mechanics - KNS2123: Tutorial Consolidation 2Jacklyne LiwieNo ratings yet
- Lynkurs Prosessregulering (Crash Course Process Control)Document20 pagesLynkurs Prosessregulering (Crash Course Process Control)tryanti sinambelaNo ratings yet
- Feeder Protection Relay FormatDocument4 pagesFeeder Protection Relay FormatUmapathiNo ratings yet
- RC Phase Shift OscillatorDocument3 pagesRC Phase Shift Oscillatoreseses100% (1)
- Processcontrol Topic13 PidtuningDocument15 pagesProcesscontrol Topic13 Pidtuningmuthukumartharani100% (1)
- Rate Transient AnalysisDocument204 pagesRate Transient AnalysisSalman Qamar100% (1)
- University of Engineering and Technology, Lahore Department of Electrical EngineeringDocument11 pagesUniversity of Engineering and Technology, Lahore Department of Electrical EngineeringMuhammad SameerNo ratings yet
- 110kv Mettupalayam FeederDocument3 pages110kv Mettupalayam FeedersankarindragymNo ratings yet
- Sistem Pengaturan: SimulinkDocument14 pagesSistem Pengaturan: SimulinkPutriVickyHapsariNo ratings yet
- Optimum State Space Control of A BLDC MotorDocument18 pagesOptimum State Space Control of A BLDC Motorauralius0% (1)
- Finite State Machine Design: Prith Banerjee Ece C03 Advanced Digital Design Spring 1998Document47 pagesFinite State Machine Design: Prith Banerjee Ece C03 Advanced Digital Design Spring 1998રાહુલ મેહ્તાNo ratings yet
- Torsional Modal ShopDocument6 pagesTorsional Modal ShopEwdes HernandezNo ratings yet
- Calibration Curve: 1. A Hygrometer, Which Measures The Amount of Moisture in A Gas Stream, Is To Be CalibratedDocument35 pagesCalibration Curve: 1. A Hygrometer, Which Measures The Amount of Moisture in A Gas Stream, Is To Be Calibratedmichsantos0% (1)
- 4 Wti Wellsite ValidationDocument6 pages4 Wti Wellsite ValidationbeyNo ratings yet
- O/C E/F Relay Test ReportDocument2 pagesO/C E/F Relay Test ReportMd. zahidul IslamNo ratings yet
- Teddy Ardiansyah - Study On Sodium Cavitation For Fast Reactors (III) Analysis of Cavitation With FLUENT and Erosion ExperimentDocument20 pagesTeddy Ardiansyah - Study On Sodium Cavitation For Fast Reactors (III) Analysis of Cavitation With FLUENT and Erosion ExperimentmedianuklirNo ratings yet
- 9 Timer ModDocument35 pages9 Timer ModPipat NakasenoNo ratings yet
- Routine Test Report - TemplateDocument3 pagesRoutine Test Report - TemplateAli MezeliNo ratings yet
- Timing Issues in Digital ASIC DesignDocument101 pagesTiming Issues in Digital ASIC Designnsai_vs1513No ratings yet
- 689 Track HoldDocument35 pages689 Track HoldShiva KumarNo ratings yet
- 351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 0 3 EE419 Lec4,5 Compensation-BodeDocument39 pages351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 0 3 EE419 Lec4,5 Compensation-BodeDonna NobartNo ratings yet
- Dead Time CompensatorDocument14 pagesDead Time CompensatorMeenaNo ratings yet
- Static Sequential CircuitsDocument23 pagesStatic Sequential CircuitsAnubhav SinghNo ratings yet
- 2 Inflow PerformanceDocument36 pages2 Inflow PerformanceIksan Adityo MulyoNo ratings yet
- Lesson 15: Bode Plots of Transfer Functions: ET 438a Automatic Control Systems TechnologyDocument13 pagesLesson 15: Bode Plots of Transfer Functions: ET 438a Automatic Control Systems Technologycantik cuteNo ratings yet
- Adap LathDocument48 pagesAdap LathKarsid Politeknik Negeri IndramayuNo ratings yet
- Integrator and DifferentiatorDocument4 pagesIntegrator and Differentiatoranisankarhari25No ratings yet
- CRO ManualDocument79 pagesCRO ManualElakkiya Selvaraj100% (1)
- Midterm SolutionDocument13 pagesMidterm SolutionTRIỆU HUỲNH KHẮCNo ratings yet
- Presentation - Cut C60 Solar Cell Characterization - Blue Sky Solar RacingDocument22 pagesPresentation - Cut C60 Solar Cell Characterization - Blue Sky Solar Racingpetersun825No ratings yet
- Imp Questions On Well TestingDocument10 pagesImp Questions On Well TestingrajjutripathiNo ratings yet
- Orifice & free jet flow: Z P ρg V Z P ρg VDocument4 pagesOrifice & free jet flow: Z P ρg V Z P ρg VEsra BelhajNo ratings yet
- Hfa3101 DatasheetDocument12 pagesHfa3101 DatasheettwwrNo ratings yet
- Instrumentation Lab-2Document41 pagesInstrumentation Lab-2syed zainNo ratings yet
- Principles and Applications of Thermal AnalysisFrom EverandPrinciples and Applications of Thermal AnalysisPaul GabbottRating: 4 out of 5 stars4/5 (1)
- Ftre 2016 17 C Ix (Going To X) Paper 2 PCMDocument16 pagesFtre 2016 17 C Ix (Going To X) Paper 2 PCMAnonymous sW7qhZ72100% (2)
- Analysis of Cable-Stayed BridgesDocument227 pagesAnalysis of Cable-Stayed BridgescxwNo ratings yet
- Microbiology Study GuideDocument9 pagesMicrobiology Study GuideMonica E. AgogoNo ratings yet
- THE FIFTH HORSEMAN OF THE APOCALYPSE. July - December 1962 UFOS - A HISTORY. Copyright Fremont CADocument86 pagesTHE FIFTH HORSEMAN OF THE APOCALYPSE. July - December 1962 UFOS - A HISTORY. Copyright Fremont CAOvnis FormosaNo ratings yet
- Interface and Density Profiling PresentationDocument50 pagesInterface and Density Profiling PresentationheriNo ratings yet
- 1.1 Waves and Particles According To Classical PhysicsDocument8 pages1.1 Waves and Particles According To Classical PhysicsLUCKY KUSHWAHANo ratings yet
- Astm E2583Document3 pagesAstm E2583Eliana salamancaNo ratings yet
- Science: Modified Strategic Intervention MaterialDocument32 pagesScience: Modified Strategic Intervention MaterialMar Angelo TangcangcoNo ratings yet
- 65-Finite-Element-Analysis-Of-Pipes-Conveying-Fluid Mounted-On-Viscoelastic-FoundationsDocument14 pages65-Finite-Element-Analysis-Of-Pipes-Conveying-Fluid Mounted-On-Viscoelastic-FoundationsDaniel Andres VargasNo ratings yet
- MonorailDocument13 pagesMonorailJay PadamaNo ratings yet
- Tutorial 5 - Entropy and Gibbs Free Energy - Answers PDFDocument5 pagesTutorial 5 - Entropy and Gibbs Free Energy - Answers PDFAlfaiz Radea ArbiandaNo ratings yet
- W Stephens Resume 2013Document3 pagesW Stephens Resume 2013Marcus HumphreyNo ratings yet
- Anritsu Understanding OtdrsDocument60 pagesAnritsu Understanding OtdrsMathieu Bolle100% (3)
- Teodolito Con Distanciometro South NT-023Document2 pagesTeodolito Con Distanciometro South NT-023JoséLuis100% (1)
- st3td 210 MW PDFDocument203 pagesst3td 210 MW PDFDevesh BadsiwalNo ratings yet
- ElectroGravitics 01 PDFDocument132 pagesElectroGravitics 01 PDFCalhoun100% (1)
- Gazetas 2015 Soil - Footing - Interaction PDFDocument17 pagesGazetas 2015 Soil - Footing - Interaction PDFMatías MoragaNo ratings yet
- Pump Specifications Elv Series Submersible Sump Pump With Oiltector ControlDocument7 pagesPump Specifications Elv Series Submersible Sump Pump With Oiltector ControlAnonymous PCsoNCt0mFNo ratings yet
- 117BP - CNC Technologies PDFDocument8 pages117BP - CNC Technologies PDFvenkiscribd444No ratings yet
- Airfoil NACADocument277 pagesAirfoil NACAtaufikengineer100% (4)
- NandhiniDocument11 pagesNandhiniSravan KumarNo ratings yet
- Bp8-Tension: User Defined Applied Forces at Interface Basic DimensionsDocument4 pagesBp8-Tension: User Defined Applied Forces at Interface Basic DimensionsMallesh NenkatNo ratings yet
- Module22 - Consequence Analysis - Effect ModelDocument52 pagesModule22 - Consequence Analysis - Effect ModelMinh ThưNo ratings yet
- Grade 5 Science Practice Test: Nebraska Department of Education 2012Document13 pagesGrade 5 Science Practice Test: Nebraska Department of Education 2012Ria SihombingNo ratings yet
- Physics ProjectDocument16 pagesPhysics ProjectPriyanshuNo ratings yet
- Moisture Content in PET PreformsDocument3 pagesMoisture Content in PET PreformsGeorge MarkasNo ratings yet
- Marta Ziemienczuk DissertationDocument134 pagesMarta Ziemienczuk DissertationLetalis IraNo ratings yet
- NEMA Grade G10 Glass Epoxy LaminateDocument1 pageNEMA Grade G10 Glass Epoxy Laminateim4uim4uim4uim4uNo ratings yet