You might also like
- Plantilla DiplomaDocument1 pagePlantilla DiplomaAle UrbiinaNo ratings yet
- ¿En Dónde Dice La Biblia Que... ?Document188 pages¿En Dónde Dice La Biblia Que... ?José Ronaldo Vigil Muñoz100% (5)
- Adviento JovenesDocument15 pagesAdviento JovenesAle UrbiinaNo ratings yet
- Adviento JovenesDocument15 pagesAdviento JovenesAle UrbiinaNo ratings yet
- Practica 03 POODocument75 pagesPractica 03 POOJUAN NICANOR ALIAGA GIRONNo ratings yet
- Teorema de ShanonDocument3 pagesTeorema de ShanonSamuelAvalosNo ratings yet
- 2 Nefi 3-5Document17 pages2 Nefi 3-5tutorprocomNo ratings yet
- El Silbo Gomero Como Arte de Hablar PDFDocument26 pagesEl Silbo Gomero Como Arte de Hablar PDFLorenzo DelgadoNo ratings yet
- Trabaja en ConocerteDocument4 pagesTrabaja en Conocertecrista776No ratings yet
- Manual de PNLDocument16 pagesManual de PNLGustavo A. Sarache MillanNo ratings yet
- Santa CenaDocument2 pagesSanta CenaDany GuerraNo ratings yet
- El Pastor Como Un Fiel Administrador GCJDocument114 pagesEl Pastor Como Un Fiel Administrador GCJGerardo de Jesús Cordero LópezNo ratings yet
- La casa de papel: análisis de la trama y personajes en las 4 temporadasDocument4 pagesLa casa de papel: análisis de la trama y personajes en las 4 temporadasScream PxndxNo ratings yet
- Teología AT Juicio YahvéDocument2 pagesTeología AT Juicio YahvéOmar ElenilsonNo ratings yet
- Fonética Acústica: Introducción a los Conceptos BásicosDocument26 pagesFonética Acústica: Introducción a los Conceptos Básicosjurevec0% (1)
- Ingeniero ecuatoriano busca empleo en IADocument9 pagesIngeniero ecuatoriano busca empleo en IAACSIMB AUTOMATIZACIONNo ratings yet
- Lev Manovich - El Lenguaje de Los Nuevos Medios (Capítulo 5)Document41 pagesLev Manovich - El Lenguaje de Los Nuevos Medios (Capítulo 5)Dieta Cognitiva100% (1)
- DISCERNIMIENTO de A LOS PIES DEL MAESTRODocument7 pagesDISCERNIMIENTO de A LOS PIES DEL MAESTROSERGE PCNo ratings yet
- Prueba Global de Lengua y LiteraturaDocument7 pagesPrueba Global de Lengua y LiteraturaYesika Calquín ArellanoNo ratings yet
- Novena A San Rafael ArnáizDocument3 pagesNovena A San Rafael ArnáizHola SueñaNo ratings yet
- HIPOACUSIADocument2 pagesHIPOACUSIAAngel BahenaNo ratings yet
- Opera y Teattro Musical Xiomy PintoDocument2 pagesOpera y Teattro Musical Xiomy PintoRomina CasellaNo ratings yet
- CamilaDocument6 pagesCamilaCamila Parra ArizaNo ratings yet
- S14.s2-Esquema para PC2 2023 Marzo - 1047834069Document4 pagesS14.s2-Esquema para PC2 2023 Marzo - 1047834069Yessy RC100% (1)
- La Profecia PDF Jacob Cristo (Título)Document1 pageLa Profecia PDF Jacob Cristo (Título)Gladys BravoNo ratings yet
- Sarmiento y el Facundo: civilización y barbarieDocument8 pagesSarmiento y el Facundo: civilización y barbarieLaura ParraNo ratings yet
- Clase 1.7.4 Brick Program / PROGRAMACION BRICK EV3 LEGODocument13 pagesClase 1.7.4 Brick Program / PROGRAMACION BRICK EV3 LEGOEmulsión De ScottNo ratings yet
- Larrosa Pedagogia ProfanaDocument13 pagesLarrosa Pedagogia ProfanaWanderson Vilton83% (6)
- Descargar Biblia de Estudio Macarthur Gratis Espanol PDFDocument20 pagesDescargar Biblia de Estudio Macarthur Gratis Espanol PDFerik0% (2)
- Tablero de Lectoescritura y DescripcionesDocument19 pagesTablero de Lectoescritura y DescripcionesCarmi BáezNo ratings yet
- Pronombres. Clasificación y FunciónDocument14 pagesPronombres. Clasificación y FunciónLilian AyalaNo ratings yet
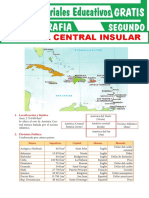
- America Central Insular para Segundo Grado de SecundariaDocument5 pagesAmerica Central Insular para Segundo Grado de SecundariaAlejandra FernandezNo ratings yet
- Diptongo e HiatoDocument5 pagesDiptongo e HiatofalconjaraNo ratings yet
- Tareas VariasDocument18 pagesTareas Variasyelimar milagros gimon amundarayNo ratings yet