You might also like
- Asic CH13Document30 pagesAsic CH13Vivek100% (2)
- Identification of Non-resettable flops for faster Gate Level SimulationDocument16 pagesIdentification of Non-resettable flops for faster Gate Level SimulationShashank Mishra100% (1)
- Application-Specific Integrated Circuit ASIC A Complete GuideFrom EverandApplication-Specific Integrated Circuit ASIC A Complete GuideNo ratings yet
- SDFDocument18 pagesSDFManda SwamyNo ratings yet
- Turing Machine ExplainedDocument50 pagesTuring Machine ExplainedjunkBOX GladiAtorNo ratings yet
- Low Power Design Techniques For Digital Logic CircuitsDocument174 pagesLow Power Design Techniques For Digital Logic CircuitsPronadeep BoraNo ratings yet
- Development of a derivative standard cell library BNM_LVT_45nm for CMOS GPDK045 libraryDocument46 pagesDevelopment of a derivative standard cell library BNM_LVT_45nm for CMOS GPDK045 librarySumanth VarmaNo ratings yet
- Soc Verification StrategyDocument2 pagesSoc Verification StrategyDebashis100% (2)
- Verilab Dvcon Tutorial ADocument138 pagesVerilab Dvcon Tutorial Ahimabindu2305No ratings yet
- Calibration Techniques for High-Speed Pipelined ADCsDocument61 pagesCalibration Techniques for High-Speed Pipelined ADCsacsreddy77No ratings yet
- Asic Design FlowDocument133 pagesAsic Design FlowrichbuggerNo ratings yet
- Lecture25 Fpga ConcludeDocument33 pagesLecture25 Fpga Concludeapi-3834272100% (1)
- IBM ASIC-SoC MethodologyDocument12 pagesIBM ASIC-SoC Methodologyghatakp2069No ratings yet
- Architectural-level synthesis and optimization techniquesDocument45 pagesArchitectural-level synthesis and optimization techniquesPrashant SinghNo ratings yet
- VerilogDocument226 pagesVerilogNadeem AkramNo ratings yet
- Solutions To Problems From Essentials of Electronic TestingDocument215 pagesSolutions To Problems From Essentials of Electronic TestingPradeep Chandra82% (28)
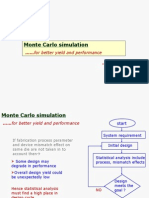
- Cadence Monte Carlo Simulation TutorialDocument51 pagesCadence Monte Carlo Simulation Tutorialkuomatt100% (1)
- Using Parameterised ClassesDocument14 pagesUsing Parameterised ClassespriyajeejoNo ratings yet
- Primetime: User Guide: Distributed Multiscenario AnalysisDocument95 pagesPrimetime: User Guide: Distributed Multiscenario AnalysisYongwoo KimNo ratings yet
- Modelling Latches and FlipflopsDocument9 pagesModelling Latches and Flipflopsmachnik1486624No ratings yet
- The Ibm Asic/Soc Methodology - A Recipe For First-Time SuccessDocument12 pagesThe Ibm Asic/Soc Methodology - A Recipe For First-Time Successjagmohan.nanawareNo ratings yet
- Automatic Speech RecognitionDocument45 pagesAutomatic Speech RecognitionrahulNo ratings yet
- Shakti ReportDocument24 pagesShakti Reportsachin m cNo ratings yet
- Decision Feedback EqualiserDocument9 pagesDecision Feedback EqualiserHari PrasathNo ratings yet
- Cache Coherence - MESI MOESIDocument57 pagesCache Coherence - MESI MOESIMohd ImranNo ratings yet
- Thesis PDFDocument110 pagesThesis PDFRohit PandeyNo ratings yet
- 1 - Testbench Guide For OVMDocument42 pages1 - Testbench Guide For OVMabhipankajNo ratings yet
- Clock Domain Crossing Techniques and SolutionsDocument38 pagesClock Domain Crossing Techniques and SolutionsRamakrishnaRao SoogooriNo ratings yet
- VLSI System Design: 06-2757575 X 62371 Kjlee@mail - Ncku.edu - TWDocument14 pagesVLSI System Design: 06-2757575 X 62371 Kjlee@mail - Ncku.edu - TWsckidNo ratings yet
- Assura HowtoDocument8 pagesAssura HowtoEsakkiPonniahNo ratings yet
- SAR ADC TutorialDocument48 pagesSAR ADC TutorialPing-Liang Chen100% (1)
- 3D IC DFT Chen SNUGDocument9 pages3D IC DFT Chen SNUGUmesh ParasharNo ratings yet
- Zynq 7000 TRMDocument1,770 pagesZynq 7000 TRMSambhav VermanNo ratings yet
- Basics Simulation TechnologyDocument26 pagesBasics Simulation TechnologybunsenNo ratings yet
- BuchblockDocument103 pagesBuchblockRafiqul IslamNo ratings yet
- AI Transformation PlaybookDocument22 pagesAI Transformation PlaybookOdun Adetola AdeboyeNo ratings yet
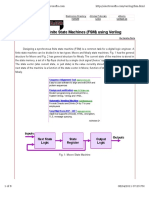
- Designing Finite State Machines (FSM) Using VerilogDocument8 pagesDesigning Finite State Machines (FSM) Using Verilog1am17ec014 ashnal ahmedNo ratings yet
- VLSI Cadance ManualDocument84 pagesVLSI Cadance ManualTony ParkerNo ratings yet
- Speech Recognition Using Ic HM2007Document31 pagesSpeech Recognition Using Ic HM2007Nitin Rawat100% (4)
- Systemverilog For Design and Verification: Engineer Explorer SeriesDocument486 pagesSystemverilog For Design and Verification: Engineer Explorer Seriesvinay100% (1)
- Expanding The Synopsys Primetime Solution With Power AnalysisDocument7 pagesExpanding The Synopsys Primetime Solution With Power AnalysisRamakrishnaRao SoogooriNo ratings yet
- System Verilog Overview-IbmDocument56 pagesSystem Verilog Overview-IbmABHAYNo ratings yet
- VLSI/FPGA Design Flow with Mentor Graphics ToolsDocument66 pagesVLSI/FPGA Design Flow with Mentor Graphics Toolslhari_04No ratings yet
- SystemVerilog Vs Verilog in RTL DesignDocument4 pagesSystemVerilog Vs Verilog in RTL DesignVijay KumarNo ratings yet
- SoC System DesignDocument82 pagesSoC System DesignA B Shinde100% (2)
- Silvaco TCAD Athena User ManualDocument438 pagesSilvaco TCAD Athena User Manualindrajit_0804No ratings yet
- Face Recognition Using PcaDocument15 pagesFace Recognition Using Pcaarjun1698No ratings yet
- An Introduction To Synopsys Design AutomationDocument24 pagesAn Introduction To Synopsys Design Automationprathap13No ratings yet
- Model Connectivity RAK PresentationDocument31 pagesModel Connectivity RAK PresentationHien HaNo ratings yet
- Verilog Imp...Document105 pagesVerilog Imp...Arun JyothiNo ratings yet
- Post Si Validation.Document63 pagesPost Si Validation.guru87.joshi3473No ratings yet
- Lecture23 dr3Document37 pagesLecture23 dr3api-3834272No ratings yet
- Vlsi ppts1-1Document63 pagesVlsi ppts1-1naveensilveriNo ratings yet
- Computer Vision ch2Document75 pagesComputer Vision ch2ssNo ratings yet
- CS6670: Computer Vision: Lecture 1: Images and Image FilteringDocument28 pagesCS6670: Computer Vision: Lecture 1: Images and Image FilteringAbdulbaki AybakanNo ratings yet
- Linear FiltersDocument85 pagesLinear FilterssaranrajNo ratings yet
- C ArrayDocument17 pagesC ArraymuucoolNo ratings yet
- Nyul Fuzzy SegmentationDocument14 pagesNyul Fuzzy SegmentationmuucoolNo ratings yet
- C++ Operator Precedence - CppreferenceDocument2 pagesC++ Operator Precedence - CppreferencemuucoolNo ratings yet
- MIT6 096IAP11 Assn02Document12 pagesMIT6 096IAP11 Assn02Saugat KarNo ratings yet
- Lec 9Document24 pagesLec 9muucoolNo ratings yet
- IT Final Upto 4th Year Syllabus 14.03.14Document76 pagesIT Final Upto 4th Year Syllabus 14.03.14Bashitwa RoyNo ratings yet
- 09 Image Filtering Edge Detection 09 PDFDocument15 pages09 Image Filtering Edge Detection 09 PDFBarty WaineNo ratings yet
- Area/Mask Processing Methods: - What Is A Mask?Document10 pagesArea/Mask Processing Methods: - What Is A Mask?Roudy FarraneNo ratings yet
- Area/Mask Processing Methods: - What Is A Mask?Document10 pagesArea/Mask Processing Methods: - What Is A Mask?Roudy FarraneNo ratings yet
- Speckle Reducing Anisotropic DiffusionDocument11 pagesSpeckle Reducing Anisotropic DiffusionmuucoolNo ratings yet
- MIT6 096IAP11 ProjectDocument3 pagesMIT6 096IAP11 ProjectSaugat KarNo ratings yet
- Inputoutput With FilesDocument9 pagesInputoutput With FilesmuucoolNo ratings yet
- Lecture 16Document36 pagesLecture 16muucoolNo ratings yet
- Lecture 16Document36 pagesLecture 16muucoolNo ratings yet
- Astrology and EducationDocument3 pagesAstrology and EducationmuucoolNo ratings yet
- Datastruct MultistacksDocument61 pagesDatastruct MultistacksShubhenduVinayakNo ratings yet
- The Quintile & Bi-QuintileDocument7 pagesThe Quintile & Bi-Quintilemuucool100% (3)
- Opencv TutorialDocument34 pagesOpencv TutorialFrancisco AssisNo ratings yet
- Sun Astrowiki enDocument3 pagesSun Astrowiki enmuucoolNo ratings yet
- Kalasarpa Dosham - AstrologyForUDocument4 pagesKalasarpa Dosham - AstrologyForUmuucoolNo ratings yet
- GraphDocument2 pagesGraphmuucoolNo ratings yet
- Rahu FactsDocument3 pagesRahu FactsmuucoolNo ratings yet
- Session 06 GraphDocument20 pagesSession 06 GraphmuucoolNo ratings yet
- BY: Pinkesh DesaiDocument24 pagesBY: Pinkesh DesaimuucoolNo ratings yet
- CodesDocument1 pageCodesmuucoolNo ratings yet
- 7tema T120M013Document108 pages7tema T120M013muucoolNo ratings yet
- Stopwath C SharpDocument1 pageStopwath C SharpmuucoolNo ratings yet
- Stack ADTDocument20 pagesStack ADTmuucoolNo ratings yet
- Crop Text Out of Binary ... CV C++ - Stack OverflowDocument1 pageCrop Text Out of Binary ... CV C++ - Stack OverflowmuucoolNo ratings yet
- CGR U2T3 Presentation7Document45 pagesCGR U2T3 Presentation7Kaiwalya MatreNo ratings yet
- Art Forms 1Document79 pagesArt Forms 1Patricia KellyNo ratings yet
- Lecture-7 Application SoftwareDocument67 pagesLecture-7 Application SoftwareMaryam AleemNo ratings yet
- Fundamentals of Engineering Drawing & Coordinate Systems in AutoCADDocument38 pagesFundamentals of Engineering Drawing & Coordinate Systems in AutoCADArya GuptaNo ratings yet
- Wonderware InTouch Comprehensive Course Description DFGHGH FGNFGH FGNFN FGNFHMJ FNGFHMN FNMNM FGJNFJN FJRFJ FJJ FJMNKJ FMHFM FMFHM FMHGHM MHGDM DMHG VBNXN Aeh Rturt Rutjrujh RFJDocument6 pagesWonderware InTouch Comprehensive Course Description DFGHGH FGNFGH FGNFN FGNFHMJ FNGFHMN FNMNM FGJNFJN FJRFJ FJJ FJMNKJ FMHFM FMFHM FMHGHM MHGDM DMHG VBNXN Aeh Rturt Rutjrujh RFJrayedkhanNo ratings yet
- 2d Computer GraphicsDocument10 pages2d Computer GraphicsKamaRaj SundaramoorthyNo ratings yet
- Photoshop 7 IznutraDocument976 pagesPhotoshop 7 IznutraD-JOPNo ratings yet
- Digital Imaging Engineering PaperDocument4 pagesDigital Imaging Engineering PaperShihanur TahmidNo ratings yet
- PackMan ReportDocument41 pagesPackMan ReportPrakash SamshiNo ratings yet
- Department of Education: Republic of The PhilippinesDocument3 pagesDepartment of Education: Republic of The PhilippinesLettyLifanoNo ratings yet
- VXGI IN UE4 - Bring Global Illumination to Your UE4 GamesDocument7 pagesVXGI IN UE4 - Bring Global Illumination to Your UE4 Gamesחן נחמניNo ratings yet
- Gr8 Photo Editing Q2M1L3Document10 pagesGr8 Photo Editing Q2M1L3zoeylaylahriveroNo ratings yet
- Click: Nuclear Instruments and Methods in Physics Research ADocument5 pagesClick: Nuclear Instruments and Methods in Physics Research AMarco Castro OrtechoNo ratings yet
- Slides NestDocument26 pagesSlides NestakunjbdipolosinNo ratings yet
- Ammop Style Guide For AuthorsDocument15 pagesAmmop Style Guide For AuthorsBobsqwartNo ratings yet
- Contoh Rubrik: Powerpoint RubricDocument6 pagesContoh Rubrik: Powerpoint RubricSyazwana NisrinNo ratings yet
- DP Videos AMD Server 15085 DriversDocument31 pagesDP Videos AMD Server 15085 DriversRaphael Fagundes LopesNo ratings yet
- Comic X Penthouse n7 PDF by Doberman WWW Cantabriatorrent NetDocument2 pagesComic X Penthouse n7 PDF by Doberman WWW Cantabriatorrent NetKyrieNo ratings yet
- Lowk Persp Interp TechrepDocument2 pagesLowk Persp Interp TechrepAnand BalajiNo ratings yet
- BSCMCAJDocument25 pagesBSCMCAJSayan Sarkar100% (1)
- 4 Using Gdi in MFCDocument9 pages4 Using Gdi in MFCsangeethaag19No ratings yet
- CS 360: Introduction To Computer GraphicsDocument47 pagesCS 360: Introduction To Computer GraphicsNiskarsh KumarNo ratings yet
- 2D Shader Development 02 Illumination and ShadowsDocument136 pages2D Shader Development 02 Illumination and ShadowsXIANG ZHAONo ratings yet
- Local Entrepreneur Presentation Assignment & RubricDocument3 pagesLocal Entrepreneur Presentation Assignment & RubricmrmclauchlinNo ratings yet
- Exam Objectives: Autodesk Certified User: MayaDocument5 pagesExam Objectives: Autodesk Certified User: Mayakaulah gileNo ratings yet
- Fast Algorithm For Line Rasterization by Using Slope 1Document5 pagesFast Algorithm For Line Rasterization by Using Slope 1api-3754855No ratings yet
- PR2 Q2 Module 5Document9 pagesPR2 Q2 Module 5Ashes VillNo ratings yet
- Curriculum Map-6th GradeDocument16 pagesCurriculum Map-6th GradeGreg Kennedy100% (1)
- AV Aids IntroductionDocument29 pagesAV Aids Introductionsanthyakunjumon100% (1)
- Features Google Sketchup Google Sketchup Pro: SupportDocument4 pagesFeatures Google Sketchup Google Sketchup Pro: SupportDavorka Frgec-VrančićNo ratings yet