You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Kathak Dance BookletDocument58 pagesKathak Dance Bookletಜಗದೀಶ್ ಎ ಎಂNo ratings yet
- Kathak Dance BookletDocument58 pagesKathak Dance Bookletಜಗದೀಶ್ ಎ ಎಂNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Cocoa World Production (2015/2016) : No. Country Production (1000 Ton/year)Document80 pagesCocoa World Production (2015/2016) : No. Country Production (1000 Ton/year)AvinashRaiNo ratings yet
- Machine Design Ball Screw Vol 1 e BookDocument22 pagesMachine Design Ball Screw Vol 1 e Bookविशाल पुडासैनीNo ratings yet
- Machine Design Ball Screw Vol 1 e BookDocument22 pagesMachine Design Ball Screw Vol 1 e Bookविशाल पुडासैनीNo ratings yet
- Noise Vibration Analysis in AutomobilesDocument30 pagesNoise Vibration Analysis in AutomobilesSanket_DhanaveNo ratings yet
- Acoustic in Plumbing - CEU208Document19 pagesAcoustic in Plumbing - CEU208Harshal ShahNo ratings yet
- Bolted 1Document47 pagesBolted 1Purna ChNo ratings yet
- About Fifth Wheels: If You Want To Enhance The Efficiency of Your TractorDocument17 pagesAbout Fifth Wheels: If You Want To Enhance The Efficiency of Your TractorAvinashRaiNo ratings yet
- JW TICO Product Guide Issue 1-18 PDFDocument48 pagesJW TICO Product Guide Issue 1-18 PDFgkdora574No ratings yet
- BS Iso 02017-2-2007 (2008)Document20 pagesBS Iso 02017-2-2007 (2008)Ahmed SalehNo ratings yet
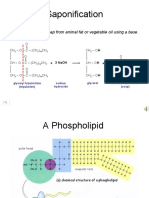
- Saponification: Process of Making Soap From Animal Fat or Vegetable Oil Using A BaseDocument14 pagesSaponification: Process of Making Soap From Animal Fat or Vegetable Oil Using A BaseAvinashRaiNo ratings yet
- Design and Analysis of Independent Suspension System Using FEADocument7 pagesDesign and Analysis of Independent Suspension System Using FEAAvinashRaiNo ratings yet
- 48 WordNet Tulu ShivakumarDocument7 pages48 WordNet Tulu ShivakumarAvinashRaiNo ratings yet
- Spring Wind UpDocument8 pagesSpring Wind UpAvinashRaiNo ratings yet
- Lateral Dynamics of Multiaxle Vehicles: Johannes StoerkleDocument87 pagesLateral Dynamics of Multiaxle Vehicles: Johannes StoerkleAvinashRaiNo ratings yet
- 13 DigestionDocument21 pages13 Digestionapi-270511270No ratings yet
- CasshewDocument11 pagesCasshewAvinashRaiNo ratings yet
- FatigueDocument10 pagesFatigueAvinashRaiNo ratings yet
- Lateral Dynamics of Multiaxle Vehicles: Johannes StoerkleDocument87 pagesLateral Dynamics of Multiaxle Vehicles: Johannes StoerkleAvinashRaiNo ratings yet
- NoodleDocument52 pagesNoodleAvinashRaiNo ratings yet
- Yoga Is UsedDocument42 pagesYoga Is UsedAvinashRaiNo ratings yet
- BharatanatyamDocument4 pagesBharatanatyamAvinashRaiNo ratings yet
- Customer ID Why Did You Purchase Hotstar Premium?Document4 pagesCustomer ID Why Did You Purchase Hotstar Premium?AvinashRaiNo ratings yet
- Is 210Document16 pagesIs 210Debopriyo GhoshNo ratings yet
- Design and Failure Modes of Automotive Suspension SpringsDocument20 pagesDesign and Failure Modes of Automotive Suspension SpringsheliselyayNo ratings yet
- Dynamic Systems and Control: Associate Professor, Department of Engineering DesignDocument1 pageDynamic Systems and Control: Associate Professor, Department of Engineering DesignAvinashRaiNo ratings yet
- Vibration Study of A Vehicle Suspension Assembly WDocument13 pagesVibration Study of A Vehicle Suspension Assembly WAvinashRaiNo ratings yet
- AJSE December2009 Lowres PDFDocument14 pagesAJSE December2009 Lowres PDFAvinashRaiNo ratings yet
- FG IronDocument23 pagesFG IronAvinashRaiNo ratings yet
- Disclosure To Promote The Right To InformationDocument25 pagesDisclosure To Promote The Right To InformationmggogsNo ratings yet
- Absolute vs Relative Error - Calculating Approximation PrecisionDocument1 pageAbsolute vs Relative Error - Calculating Approximation PrecisionAvinashRaiNo ratings yet
- Three Wheeled Vehicle Eprintsrvr IIScDocument30 pagesThree Wheeled Vehicle Eprintsrvr IIScSunilkumar ReddyNo ratings yet
- Adams SolverDocument138 pagesAdams Solveravegliante9314No ratings yet
- Air Bellows - ParkerDocument68 pagesAir Bellows - ParkerRastko RodićNo ratings yet
- Noise and Vibration ControlDocument4 pagesNoise and Vibration ControlVinit AhluwaliaNo ratings yet
- Analysis of Motor Vibration Isolation System With Focus On Analysis of MotorDocument8 pagesAnalysis of Motor Vibration Isolation System With Focus On Analysis of MotorJitendra ItankarNo ratings yet
- FuelleDocument1 pageFuellelucas_callesNo ratings yet
- Avm Imnr50 17aDocument2 pagesAvm Imnr50 17aRani HendrikusNo ratings yet
- Firestone Air Spring W02-358-3000Document29 pagesFirestone Air Spring W02-358-3000MROstop.comNo ratings yet
- Lea069 E0 Ed3Document4 pagesLea069 E0 Ed3phuongNo ratings yet
- 3 Symposium On Lift and Escalator TechnologiesDocument9 pages3 Symposium On Lift and Escalator TechnologiesfreddyjoertyNo ratings yet
- Industrial Products Division: Kurashiki Kako Co., Ltd. Kurashiki Kako Co., LTDDocument32 pagesIndustrial Products Division: Kurashiki Kako Co., Ltd. Kurashiki Kako Co., LTDWilliam Ronald Ochoa PaucarNo ratings yet
- Description Assembly Order No.: Style Blind Nuts, 1/4 NPT W01-358-5405 1T14C-3 Two Ply BellowsDocument30 pagesDescription Assembly Order No.: Style Blind Nuts, 1/4 NPT W01-358-5405 1T14C-3 Two Ply BellowsMROstop.comNo ratings yet
- W01 358 7442Document29 pagesW01 358 7442MROstop.comNo ratings yet
- Chapter 3Document81 pagesChapter 3Aiman HaiqalNo ratings yet
- Avm Imnr62 17aDocument2 pagesAvm Imnr62 17aRani HendrikusNo ratings yet
- DYNAMICS OF MACHINES-UNIT 4 - NotesDocument55 pagesDYNAMICS OF MACHINES-UNIT 4 - NotesSYLVIA ANITANo ratings yet
- Finite Elements and Vibration Analysis MethodsDocument56 pagesFinite Elements and Vibration Analysis MethodsRamesh GantiNo ratings yet
- Sae j577 201509 實驗室跟108 一樣的衝擊測試Document27 pagesSae j577 201509 實驗室跟108 一樣的衝擊測試timNo ratings yet
- Specifications For Mechanical System Vibration Isolation & Seismic RestraintDocument24 pagesSpecifications For Mechanical System Vibration Isolation & Seismic RestraintCarlos Torres OliverosNo ratings yet
- Isolating Equipment in Harsh EnvironmentsDocument20 pagesIsolating Equipment in Harsh Environmentsprodn123No ratings yet
- Lomerio, Jasmin M. BSME-3B - Final One Course RequirementDocument6 pagesLomerio, Jasmin M. BSME-3B - Final One Course RequirementPrincess NobleNo ratings yet
- An Introduction To Vibration Control in BuildingsDocument45 pagesAn Introduction To Vibration Control in Buildingsosama alabsiNo ratings yet
- Current State of Practice in Railway Track VibratiDocument11 pagesCurrent State of Practice in Railway Track VibratiSajid IqbalNo ratings yet
- Vibro Dampers For Shearing MachinesDocument6 pagesVibro Dampers For Shearing MachinesDYNEMECH SYSTEMS PVT. LTD.No ratings yet
- W26 358 9004Document29 pagesW26 358 9004MROstop.comNo ratings yet
- TMC Setup Guide Lab Table 20 SeriesDocument24 pagesTMC Setup Guide Lab Table 20 SeriesDiabloNo ratings yet