You might also like
- Desarrollo de aplicaciones para AndroidFrom EverandDesarrollo de aplicaciones para AndroidRating: 5 out of 5 stars5/5 (2)
- Sistemas Integrados de ManufacturaDocument16 pagesSistemas Integrados de ManufacturaVladimirNo ratings yet
- Simuladores de Robots - Jhannifer FDocument10 pagesSimuladores de Robots - Jhannifer FJhannifer100% (1)
- Monografia Construccion de Brazo RoboticoDocument10 pagesMonografia Construccion de Brazo RoboticoCarlos Quispealaya LazoNo ratings yet
- Isa e OneDocument11 pagesIsa e OneJUAN PABLO SERRANO BELTRANNo ratings yet
- TAREA Fase 4Document17 pagesTAREA Fase 4Jhon SuarezNo ratings yet
- Cosimir Tutorial en Esp A05v12n1Document5 pagesCosimir Tutorial en Esp A05v12n1inanjaanpaNo ratings yet
- Sistema de Localizacion de Taxi Basado en Mysql y PHPDocument158 pagesSistema de Localizacion de Taxi Basado en Mysql y PHPzdiaz1No ratings yet
- Proyecto Microelectronica en RFDocument31 pagesProyecto Microelectronica en RFLeonardo Rommel Escalante100% (1)
- Informe DiseñoBiomédicoIIDocument7 pagesInforme DiseñoBiomédicoIIBiomedica IPS-UcaldasNo ratings yet
- Informe Proyecto - Bluetooth Comun - InalambricasDocument6 pagesInforme Proyecto - Bluetooth Comun - InalambricasJhoel Quinllin EscNo ratings yet
- Desarrollo App Movil 2Document33 pagesDesarrollo App Movil 2daydaNo ratings yet
- RobotStudio. Folleto InformativoDocument2 pagesRobotStudio. Folleto Informativojavier_cimNo ratings yet
- ETAPA 4 Leider TorresDocument14 pagesETAPA 4 Leider TorresErick MachadoNo ratings yet
- Informe Robotica MecatronicaDocument21 pagesInforme Robotica MecatronicaWilfredo OlazabalNo ratings yet
- Problema de Investigación:: TítuloDocument4 pagesProblema de Investigación:: TítuloJhair PaucarNo ratings yet
- Software para El Modelamiento SimulacionDocument6 pagesSoftware para El Modelamiento SimulacionSergio A. EspinosaNo ratings yet
- RC MovilDocument10 pagesRC MovilmarlonNo ratings yet
- Unidad 1. Robótica. Evolución y Principales ConceptosDocument27 pagesUnidad 1. Robótica. Evolución y Principales ConceptosJose Antonio MercadoNo ratings yet
- Ensayo PrototipoDocument2 pagesEnsayo PrototipoMyaReyesGomezNo ratings yet
- Unidad 3. - Aplicaciones Moviles ActualesDocument33 pagesUnidad 3. - Aplicaciones Moviles Actualesluis andres trejo castellanos100% (1)
- Sistemas Mecatronicos IndustrialesDocument18 pagesSistemas Mecatronicos IndustrialesOrlando Carbajal DominguezNo ratings yet
- Reporte Final 3 Cabrera-VillalobosDocument30 pagesReporte Final 3 Cabrera-VillalobosCarlos VFNo ratings yet
- Proyecto Final Brazo Robotico 1Document68 pagesProyecto Final Brazo Robotico 1Luis Huaman YachasNo ratings yet
- Reporte Técnico de Desarrollo MicrocontroladoresDocument10 pagesReporte Técnico de Desarrollo MicrocontroladoresHerendira PerezNo ratings yet
- App InventorDocument18 pagesApp InventorCarolina Leal VelandiaNo ratings yet
- Laboratorio 1Document9 pagesLaboratorio 1Andree CrNo ratings yet
- Informe Dado Digital Con Micro BitDocument4 pagesInforme Dado Digital Con Micro BitJuan RodriguezNo ratings yet
- Diseño Del ProyectoDocument10 pagesDiseño Del ProyectoANGEL LUIS ALDAY OBREGONNo ratings yet
- Comandos CosimirDocument40 pagesComandos Cosimirmayalizyo0% (2)
- Proyecto Brazo Robotico Con ElectroimanDocument8 pagesProyecto Brazo Robotico Con Electroimanjohn caceresNo ratings yet
- Dpmo U1 A2 GudgDocument12 pagesDpmo U1 A2 GudgGuillermo DuranNo ratings yet
- Brazo RoboticoDocument8 pagesBrazo RoboticoAndres CuadradoNo ratings yet
- Informe Del Proyecto TempDocument12 pagesInforme Del Proyecto TempJonathan ArciniegaNo ratings yet
- Informe FinalDocument7 pagesInforme FinalJonathan Paucar TenorioNo ratings yet
- Informe Laboratorios Robótica 3.1-3.2-3.3 Generación de Trayectorias de Un Robot Móvil, Robot Híbrido y Proyecto FinalDocument10 pagesInforme Laboratorios Robótica 3.1-3.2-3.3 Generación de Trayectorias de Un Robot Móvil, Robot Híbrido y Proyecto Finaldanielw123No ratings yet
- Tesina ZeusDocument77 pagesTesina ZeusMichelle ZapataNo ratings yet
- Reporte Técnico de DesarrolloDocument6 pagesReporte Técnico de DesarrolloHerendira PerezNo ratings yet
- Brazo Robotico. Trabajo FinalDocument13 pagesBrazo Robotico. Trabajo Finalxiniskbrera100% (1)
- Descripcio AppDocument5 pagesDescripcio Appmouad maisNo ratings yet
- PelotaDocument5 pagesPelotaarturo garcía ibarraNo ratings yet
- Proyecto Transversal RoboticaDocument24 pagesProyecto Transversal RoboticaRuben TachoNo ratings yet
- Paper RV-M1Document5 pagesPaper RV-M1dickforusNo ratings yet
- MIT App InventorDocument3 pagesMIT App InventorEnya ARNo ratings yet
- Aplicaciones MóvilesDocument22 pagesAplicaciones MóvilesAnton OrwellNo ratings yet
- Ejemplo AntreproyectoDocument20 pagesEjemplo AntreproyectoAngel FajardoNo ratings yet
- Proyecto Carito BluetoothDocument5 pagesProyecto Carito BluetoothSusy CruzNo ratings yet
- Fase4 Colaborativa Grupo 2Document17 pagesFase4 Colaborativa Grupo 2fredysNo ratings yet
- Actividad 5Document5 pagesActividad 5alfredoNo ratings yet
- Manual de AndroidDocument45 pagesManual de AndroidManu SanchezNo ratings yet
- Integradora Reporte 1Document16 pagesIntegradora Reporte 1alorodriguez253No ratings yet
- DomoticaDocument9 pagesDomoticaCarmen AyllónNo ratings yet
- Informe Diseño Proyecto Unidad IIIDocument14 pagesInforme Diseño Proyecto Unidad IIIPaul JerezNo ratings yet
- Proyecto Brazo MecanicoDocument11 pagesProyecto Brazo MecanicoCarlos Alberto MosqueraNo ratings yet
- Tecnicas de Mejoramiento de Codigo (Autoguardado)Document10 pagesTecnicas de Mejoramiento de Codigo (Autoguardado)06b15No ratings yet
- TR1 Avance de IntDocument7 pagesTR1 Avance de Intvictor100% (1)
- Android: Programación de dispositivos móviles a través de ejemplosFrom EverandAndroid: Programación de dispositivos móviles a través de ejemplosNo ratings yet
- Kotlin y Jetpack Compose. Desarrollo de aplicaciones AndroidFrom EverandKotlin y Jetpack Compose. Desarrollo de aplicaciones AndroidNo ratings yet
- Prueba DiagnosticaDocument2 pagesPrueba DiagnosticaCesar Augusto Hernandez SuarezNo ratings yet
- Escala de Evaluación de Habilidades Sociales (EESHA)Document1 pageEscala de Evaluación de Habilidades Sociales (EESHA)Cesar Augusto Hernandez Suarez100% (1)
- UPN - Curso ECDF PDFDocument99 pagesUPN - Curso ECDF PDFCesar Augusto Hernandez SuarezNo ratings yet
- UPN - Curso ECDF PDFDocument99 pagesUPN - Curso ECDF PDFCesar Augusto Hernandez SuarezNo ratings yet
- La Teoria Antropologica de Lo Didactico en El Aula 599e51741723dd61f536b796Document1 pageLa Teoria Antropologica de Lo Didactico en El Aula 599e51741723dd61f536b796Cesar Augusto Hernandez SuarezNo ratings yet
- Cursillo Numeros Complejo Con ExcelDocument8 pagesCursillo Numeros Complejo Con ExcelCesar Augusto Hernandez SuarezNo ratings yet
- Ejercicios para ResolverDocument6 pagesEjercicios para ResolverCesar Augusto Hernandez SuarezNo ratings yet
- Cursillo Numeros Complejo Con Excel PDFDocument8 pagesCursillo Numeros Complejo Con Excel PDFCesar Augusto Hernandez SuarezNo ratings yet
- La Importancia Del Pensamiento Filosófico y Científico en La Generación de ConocimientoDocument13 pagesLa Importancia Del Pensamiento Filosófico y Científico en La Generación de ConocimientoCesar Augusto Hernandez SuarezNo ratings yet
- El Método Científico y La Nueva Filosofía de La CienciaDocument3 pagesEl Método Científico y La Nueva Filosofía de La CienciaCesar Augusto Hernandez Suarez50% (2)
- Agenda Emprendedora 1Document32 pagesAgenda Emprendedora 1Impresiones BenmaNo ratings yet
- Initial Tuning LteDocument17 pagesInitial Tuning LteEmilio100% (1)
- NTC 105Document12 pagesNTC 105jefferronn100% (1)
- Base de Datos Explotadores Operadores y Equipos Uas 30 Sept 2021Document107 pagesBase de Datos Explotadores Operadores y Equipos Uas 30 Sept 2021Enrique SanchezNo ratings yet
- Diagnóstico Participativo para La Planificación de La Institución y Construcción Del PI 2017Document7 pagesDiagnóstico Participativo para La Planificación de La Institución y Construcción Del PI 2017Mara LaraNo ratings yet
- Estudio AgroeconomicoDocument16 pagesEstudio AgroeconomicoElin Ruzz Rojas Rivera0% (1)
- Práctica N°8Document7 pagesPráctica N°8ARMANDONo ratings yet
- Formato de Planeación y Diario de Campo 2019Document1 pageFormato de Planeación y Diario de Campo 2019Vero Gonzalez MontoyaNo ratings yet
- 16 Ac Segunda Parte (Resumido) Atlas CopcoDocument237 pages16 Ac Segunda Parte (Resumido) Atlas Copcoricardo100% (1)
- 05 Causas Identificacion y Posibles Soluciones para Las FisurasDocument22 pages05 Causas Identificacion y Posibles Soluciones para Las FisurasCarolina Varas CortésNo ratings yet
- FORODocument6 pagesFOROMayumi VillenteNo ratings yet
- La Estrategia Del Oceano Azul Cap 1.1Document2 pagesLa Estrategia Del Oceano Azul Cap 1.1Ignacio R. Bringas Garcia100% (1)
- Actividad 2 Yohan FierroDocument6 pagesActividad 2 Yohan FierroCesar GuzmanNo ratings yet
- Flotación de MineralesDocument16 pagesFlotación de MineralesElias Curiñaupa QuispeNo ratings yet
- La Inclusión de Las Personas Con Discapacidad en La Educación Superior en México, Sinectica 2016Document15 pagesLa Inclusión de Las Personas Con Discapacidad en La Educación Superior en México, Sinectica 2016cynNo ratings yet
- 1que Es Una Inspección PlaneadaDocument4 pages1que Es Una Inspección Planeadaandrea sincheNo ratings yet
- Curriculum Empresarial - A y B Ssoma Servicios S.A.C.Document8 pagesCurriculum Empresarial - A y B Ssoma Servicios S.A.C.Alex Palomino DiazNo ratings yet
- Calibracion de Bomba Aspersora o de EspaldaDocument5 pagesCalibracion de Bomba Aspersora o de Espaldaottorodriguez75% (4)
- Trabajo Pco FinalDocument21 pagesTrabajo Pco FinalRaquel Vila Fabian100% (3)
- Borme A 2015 245 09Document9 pagesBorme A 2015 245 09Jonatas cassianoNo ratings yet
- Piano GrupalDocument105 pagesPiano GrupalArgenys Rodriguez100% (1)
- Crear Oferta de LicitacionDocument20 pagesCrear Oferta de LicitacionTac TecNo ratings yet
- Album de Sellos de Bolivia - OSS - 1859-1925Document19 pagesAlbum de Sellos de Bolivia - OSS - 1859-1925Tab Trece50% (2)
- Oficio Reiteratorio CredicoopDocument1 pageOficio Reiteratorio CredicoopBibii IzarraNo ratings yet
- Diseño de Alto NivelDocument1 pageDiseño de Alto NivelAdriana TamayoNo ratings yet
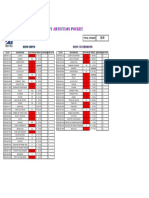
- REFACCIONES DAZON ABRIL 2019 Pocket PDFDocument1 pageREFACCIONES DAZON ABRIL 2019 Pocket PDFFany ReyesNo ratings yet
- Test de Calculo Diferencial 02Document3 pagesTest de Calculo Diferencial 02Carlos ConradoNo ratings yet
- Edificios InteligentesDocument18 pagesEdificios InteligentesWashing washing JoOelNo ratings yet
- Encriptar Base de DatosDocument4 pagesEncriptar Base de DatosLuchoCVNo ratings yet