You might also like
- Método Norma RusaDocument3 pagesMétodo Norma RusabyronNo ratings yet
- Ejemplo - Interaccion Portico-Tabique - Método de MutoDocument4 pagesEjemplo - Interaccion Portico-Tabique - Método de MutoBraian Manrique100% (1)
- Muros de Sostenimiento-cap13-Teodoro HarmsenDocument11 pagesMuros de Sostenimiento-cap13-Teodoro HarmsenFavixson FpNo ratings yet
- Modelado no lineal de albañilería en SAP2000Document5 pagesModelado no lineal de albañilería en SAP2000Simón BustosNo ratings yet
- Diseño estructural de edificio de 4 niveles en concreto armado utilizando pórticos especialesDocument15 pagesDiseño estructural de edificio de 4 niveles en concreto armado utilizando pórticos especialesabraham rodriguezNo ratings yet
- Diaposistivas de Interacción Suelo EstructuraDocument31 pagesDiaposistivas de Interacción Suelo EstructuraKathysitah Tkm Bernabe CabreraNo ratings yet
- Teoría de vigas en TDocument72 pagesTeoría de vigas en TEl K-GonNo ratings yet
- Modelado de Pórticos de Concreto Armado en FTOOLDocument17 pagesModelado de Pórticos de Concreto Armado en FTOOLJorge PenichéNo ratings yet
- TABLAS KalmanokDocument23 pagesTABLAS KalmanokEdwin Ivan Vilchez Pacherrez100% (1)
- TP Seleccion de Cota y Tipo de FundacionDocument10 pagesTP Seleccion de Cota y Tipo de FundacionMatíasPaoloniNo ratings yet
- Optimización de erratas en documento sobre diseño de sabandijas de hormigón armadoDocument10 pagesOptimización de erratas en documento sobre diseño de sabandijas de hormigón armadomarvinsierraNo ratings yet
- EJERCIO01Document5 pagesEJERCIO01Oshin Eun-seoNo ratings yet
- Calzaduras en LimaDocument3 pagesCalzaduras en LimaSkyNet0000100% (1)
- C-03 Capacidad PortanteDocument4 pagesC-03 Capacidad PortanteFred Eyner Jara ElgueraNo ratings yet
- Rubrica SismoDocument7 pagesRubrica SismoGorecesar CesarNo ratings yet
- Albañileria Pucp EnsayosDocument90 pagesAlbañileria Pucp EnsayosJose AngelNo ratings yet
- Revista Estructurando n9 Año 2020Document60 pagesRevista Estructurando n9 Año 2020camilo6moraNo ratings yet
- Mander EspañolDocument25 pagesMander EspañolJUAN MANUEL ALFARO RODRIGUEZNo ratings yet
- Analisis de Riesgo Los Andes LocrojaDocument16 pagesAnalisis de Riesgo Los Andes LocrojasdbfiqcivilNo ratings yet
- Metodo de Newmark y HoltzenDocument3 pagesMetodo de Newmark y HoltzenOswaldo Yv100% (1)
- Zapata AcarteladaDocument1 pageZapata AcarteladaJuanNo ratings yet
- Informe de Estudio de Mecanica de SuelosDocument40 pagesInforme de Estudio de Mecanica de SueloscristianNo ratings yet
- Conferencia Conceptos de Diseño Estructural de Muros de Concreto Armado en El Peru Asocem Antonio Blanco Blasco Daniel Chang Harold FloresDocument156 pagesConferencia Conceptos de Diseño Estructural de Muros de Concreto Armado en El Peru Asocem Antonio Blanco Blasco Daniel Chang Harold FloresTony DiazNo ratings yet
- Evaluación del factor R para marcos resistentes a momentoDocument7 pagesEvaluación del factor R para marcos resistentes a momentoSergio TapiaNo ratings yet
- Sol Pc1 Analisis Estructural 2013-2Document4 pagesSol Pc1 Analisis Estructural 2013-2Nelvin GarcíaNo ratings yet
- Muro en Voladizo I PDFDocument27 pagesMuro en Voladizo I PDFRoy F. MillanNo ratings yet
- Concreto Armado (Diseño A Corte)Document26 pagesConcreto Armado (Diseño A Corte)José Luis Zambrano OjedaNo ratings yet
- Comportamiento Dinámico de Estructuras De1 GDLDocument42 pagesComportamiento Dinámico de Estructuras De1 GDLALEXANDER ATENCIO POLONo ratings yet
- Ejercicios - Columnas PDFDocument24 pagesEjercicios - Columnas PDFl Fernando100% (1)
- Comportamiento sísmico de muros estructurales: caso terremoto Maule 2010Document35 pagesComportamiento sísmico de muros estructurales: caso terremoto Maule 2010enucasNo ratings yet
- Deduccion de La Integral de DuhamelDocument3 pagesDeduccion de La Integral de DuhamelScarlet Meza FerNo ratings yet
- Prueba 1 Dinámica EstructuralDocument2 pagesPrueba 1 Dinámica EstructuralMARIA JULIANA RIVEROS COELLONo ratings yet
- DOEST - M9 - T2 - P2 - Diseño Estructural de Zapatas Aisladas y Corridas PDFDocument49 pagesDOEST - M9 - T2 - P2 - Diseño Estructural de Zapatas Aisladas y Corridas PDFAmado Noe Samir Plasencia Araujo100% (1)
- Analisis Sismico EstaticoDocument5 pagesAnalisis Sismico EstaticoDaniel Suares FloresNo ratings yet
- Diseño de muros de albañilería y acero INOX 316 para resistir sismosDocument45 pagesDiseño de muros de albañilería y acero INOX 316 para resistir sismosAna Mas YoplacNo ratings yet
- Tuberias PRFV PDFDocument5 pagesTuberias PRFV PDFMamani JuanNo ratings yet
- Diseño sísmico en concreto armadoDocument131 pagesDiseño sísmico en concreto armadoJC ParraNo ratings yet
- Sismos y Otras Acciones Accidentales Urich Curso de Patologia 2021Document83 pagesSismos y Otras Acciones Accidentales Urich Curso de Patologia 2021Gab PerNo ratings yet
- Resumen Concluido de Concreto ReforzadoDocument56 pagesResumen Concluido de Concreto ReforzadoalonsoNo ratings yet
- Pushover Paso A PasoDocument18 pagesPushover Paso A PasoDREW0% (1)
- Ingenieria Antisismica YanethDocument38 pagesIngenieria Antisismica YanethPercy Paul Rashuaman Benito100% (3)
- Coeficiente Sísmico EquivalenteDocument2 pagesCoeficiente Sísmico Equivalenteg6053963No ratings yet
- Análisis Espectral de Pórtico Idealizado de 3 Pisos - Venezuela - COVENIN 1756-01Document22 pagesAnálisis Espectral de Pórtico Idealizado de 3 Pisos - Venezuela - COVENIN 1756-01Cesar Pugsio HuamanNo ratings yet
- Dinamica Estructural Aplicada Al Diseño Sismico-17-26Document10 pagesDinamica Estructural Aplicada Al Diseño Sismico-17-26jose luisNo ratings yet
- Métodos numéricos para respuesta dinámicaDocument104 pagesMétodos numéricos para respuesta dinámicasair paterniaNo ratings yet
- Tarea 2 UPT 2021Document3 pagesTarea 2 UPT 2021Pablo AlejoNo ratings yet
- 01-Ficha Tecnica Viguetas VP Pretensa 2016Document6 pages01-Ficha Tecnica Viguetas VP Pretensa 2016Magdhiel Dorcas Vasvaldo SegoviaNo ratings yet
- Interaccion Dinamica Suelo EstructuraDocument45 pagesInteraccion Dinamica Suelo EstructuraJuan Eyael Medrano CarrilloNo ratings yet
- Tarea 7 de MatemáticasDocument3 pagesTarea 7 de MatemáticasBere Bae0% (1)
- Distribuciones ContinuasDocument3 pagesDistribuciones ContinuasJUAN PABLO SANCHEZ SERRATONo ratings yet
- Hunpiri Santuyo, Zapana QuentaDocument17 pagesHunpiri Santuyo, Zapana QuentaRodyQuiscaOtazuNo ratings yet
- Guia TP - Leyes y Principios - 2020Document5 pagesGuia TP - Leyes y Principios - 2020Nazareno LorenzattoNo ratings yet
- Ejercicios Decimo TrigoDocument5 pagesEjercicios Decimo TrigoOscar Niño BernalNo ratings yet
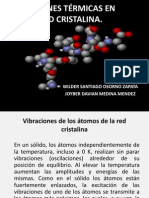
- Oscilaciones térmicas en una red cristalinaDocument16 pagesOscilaciones térmicas en una red cristalinaandresfelipeguerreroNo ratings yet
- Capitulo 38Document18 pagesCapitulo 38BRAYAN FARFAN LOAYZANo ratings yet
- Sismo de Mexico 1957Document12 pagesSismo de Mexico 1957BRAYAN FARFAN LOAYZANo ratings yet
- Datos Consolidacion PDFDocument24 pagesDatos Consolidacion PDFBRAYAN FARFAN LOAYZANo ratings yet
- Deformacion en RocasDocument7 pagesDeformacion en RocasBRAYAN FARFAN LOAYZANo ratings yet
- MecapediaDocument1 pageMecapediaBRAYAN FARFAN LOAYZANo ratings yet
- Relacionesgravimetricasyvolumetricasdelsuelo PDFDocument19 pagesRelacionesgravimetricasyvolumetricasdelsuelo PDFyonnierNo ratings yet
- Auxiliar 6Document4 pagesAuxiliar 6Renzo MurilloNo ratings yet
- Acelerogramas GRLDocument5 pagesAcelerogramas GRLBRAYAN FARFAN LOAYZANo ratings yet
- Ejer Cici OsDocument10 pagesEjer Cici OsBRAYAN FARFAN LOAYZANo ratings yet
- Curso de Access 2010Document214 pagesCurso de Access 2010Camilo Sanchez100% (3)
- Tipos de AcelerogramasDocument1 pageTipos de AcelerogramasBRAYAN FARFAN LOAYZANo ratings yet
- Deformacion ConceptosDocument1 pageDeformacion ConceptosBRAYAN FARFAN LOAYZANo ratings yet
- Intro Met NumericosDocument2 pagesIntro Met NumericosBRAYAN FARFAN LOAYZANo ratings yet
- Densidad y Peso EspecíficoDocument2 pagesDensidad y Peso EspecíficoBRAYAN FARFAN LOAYZANo ratings yet
- Qué Es El Módulo de Elasticidad en El ConcretoDocument5 pagesQué Es El Módulo de Elasticidad en El ConcretoBRAYAN FARFAN LOAYZANo ratings yet
- Tema 4petrologiaDocument10 pagesTema 4petrologiaBRAYAN FARFAN LOAYZANo ratings yet
- Rocas SedimentariasDocument12 pagesRocas SedimentariasBRAYAN FARFAN LOAYZANo ratings yet
- Concreto de Alto DesempeñoDocument12 pagesConcreto de Alto DesempeñoAnonymous g3Mz9CygCRNo ratings yet
- Mecanismos de RoturaDocument2 pagesMecanismos de RoturaBRAYAN FARFAN LOAYZANo ratings yet
- Método de Diferencias FinitasDocument4 pagesMétodo de Diferencias FinitasBRAYAN FARFAN LOAYZA100% (1)
- Factor de Reduccion RDocument1 pageFactor de Reduccion RBRAYAN FARFAN LOAYZANo ratings yet
- Tipos de TunelesDocument1 pageTipos de TunelesBRAYAN FARFAN LOAYZANo ratings yet
- Conectores Metálicos para La MaderaDocument6 pagesConectores Metálicos para La MaderaBRAYAN FARFAN LOAYZANo ratings yet
- TaludesDocument4 pagesTaludesBRAYAN FARFAN LOAYZANo ratings yet
- Uniones y ConexionesDocument6 pagesUniones y ConexionesGenaro MorelNo ratings yet
- 2061 6254 1 SM PDFDocument14 pages2061 6254 1 SM PDFBRAYAN FARFAN LOAYZANo ratings yet
- Introduccion Al Metodo de Los Elementos FinitosDocument23 pagesIntroduccion Al Metodo de Los Elementos FinitosvulcametNo ratings yet
- Concreto TranslucidoDocument2 pagesConcreto TranslucidoBRAYAN FARFAN LOAYZANo ratings yet
- La HidrogeologiaDocument4 pagesLa HidrogeologiaBRAYAN FARFAN LOAYZANo ratings yet
- 893 - Anclajes EstructuralesDocument8 pages893 - Anclajes EstructuralesVladimir Cuenca CuéllarNo ratings yet
- Taller Trabajo y EnergiaDocument9 pagesTaller Trabajo y EnergiaJuan Sebastián TorresNo ratings yet
- Hidraulica BasicaDocument49 pagesHidraulica BasicaDIEGO HERNANDEZ PARRASNo ratings yet
- Sedimentador de Alta Tasa Con Placa AngostaDocument13 pagesSedimentador de Alta Tasa Con Placa AngostapilarNo ratings yet
- Taller 4.1.1. Movimiento RectilineoDocument2 pagesTaller 4.1.1. Movimiento RectilineoAdriana OONo ratings yet
- III BIM - Fuerzas - Leyes de NewtonDocument6 pagesIII BIM - Fuerzas - Leyes de NewtonGiancarlos Quezada PacherresNo ratings yet
- Tablas de diseño de secciones de madera y cálculo de deflexionesDocument19 pagesTablas de diseño de secciones de madera y cálculo de deflexionesRonaldChambiNo ratings yet
- Laboratorio de Resistencia de MaterialesDocument163 pagesLaboratorio de Resistencia de MaterialesDavid AxellNo ratings yet
- HOJA5 - Inducción emDocument7 pagesHOJA5 - Inducción emFERNANDONo ratings yet
- AE1 Cap4 EJEMPLO PARRILLA Elem InclinDocument7 pagesAE1 Cap4 EJEMPLO PARRILLA Elem InclinefrainNo ratings yet
- Ondas EstacionariaDocument4 pagesOndas Estacionariamiguel antonio sanchez gomezNo ratings yet
- Informe de Laboratorio Virtual PENDULO SIMPLEDocument3 pagesInforme de Laboratorio Virtual PENDULO SIMPLEFelix DiazNo ratings yet
- Ejercicios de termodinámicaDocument20 pagesEjercicios de termodinámicaCatalina Naranjo SantaellaNo ratings yet
- Problema Fatiga - ResueltoDocument6 pagesProblema Fatiga - ResueltoAldairCedilloNo ratings yet
- Asignación Ensayo de Resiliencia (Impacto)Document2 pagesAsignación Ensayo de Resiliencia (Impacto)ABELARDO VAZQUEZ ARMENTANo ratings yet
- Guía de Ejercicios Propuestos Transferencia de CalorDocument8 pagesGuía de Ejercicios Propuestos Transferencia de CalorLindonNo ratings yet
- Análisis de Revestimiento Del ColectorDocument16 pagesAnálisis de Revestimiento Del ColectorRomanuel Ramirez SalazarNo ratings yet
- Diagrama PDocument27 pagesDiagrama PNESTOR CUCUNA CALIZAYANo ratings yet
- MovRectUniAcceLabDocument11 pagesMovRectUniAcceLabNicolle Alexander Diaz DiazNo ratings yet
- Resultante Del Nadador Siendo Arrastrado Por El Río, Es Decir, La Suma de Los Vectores de Velocidad DelDocument4 pagesResultante Del Nadador Siendo Arrastrado Por El Río, Es Decir, La Suma de Los Vectores de Velocidad DelCentro de Ciencias Tecnología e Idiomas100% (1)
- Ejercicios de calor y temperaturaDocument6 pagesEjercicios de calor y temperaturaluisNo ratings yet
- Movimiento Circular I: ConceptoDocument5 pagesMovimiento Circular I: ConceptoCarlos Andrés Clausen AlíNo ratings yet
- Preguntas Sobre Potencial EléctricoDocument3 pagesPreguntas Sobre Potencial EléctricoMichael Dl Cruz100% (1)
- 14-15 Cap. 6 - Deformaciones en VigasDocument6 pages14-15 Cap. 6 - Deformaciones en VigasJavier MuñozNo ratings yet
- Reparacion Del Sistema de Transmision - Primera EntregaDocument8 pagesReparacion Del Sistema de Transmision - Primera EntregaFelix Junior Vilchez Castillo100% (1)
- Grupo 6 - Guia de Laboratorio 5Document15 pagesGrupo 6 - Guia de Laboratorio 5Saul ChampacNo ratings yet
- Simulacion de Fluidos para VideojuegosDocument58 pagesSimulacion de Fluidos para VideojuegosBryan OswalNo ratings yet
- Opfm 1aDocument10 pagesOpfm 1aSergio MoralesNo ratings yet
- Calculo BuggyDocument18 pagesCalculo BuggyMirko CespedesNo ratings yet
- Trabajo de FriccionDocument35 pagesTrabajo de FriccionOswaldo Briceño Rodriguez0% (1)
- p4 Ondas MecanicasDocument2 pagesp4 Ondas MecanicasSteven EspañaNo ratings yet