You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Ee2255 - Digital Logic Circuits April-May 2010Document3 pagesEe2255 - Digital Logic Circuits April-May 2010kibrom atsbhaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Question Paper Code: 55332: B.E./B.Tech - Degree Examinations, Nov/Dec 2011 Regulations 2008Document3 pagesQuestion Paper Code: 55332: B.E./B.Tech - Degree Examinations, Nov/Dec 2011 Regulations 2008kibrom atsbhaNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Ee 2254 Linear Integrated Circuits and Applications Anna University Previous Year Question PaperDocument2 pagesEe 2254 Linear Integrated Circuits and Applications Anna University Previous Year Question Paperkibrom atsbhaNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- ControllingDocument25 pagesControllingkibrom atsbhaNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Ee 2351 Power System Analysis Anna University Question PaperDocument2 pagesEe 2351 Power System Analysis Anna University Question Paperkibrom atsbhaNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Objective Type Question or MCQ of Transmission and DistributionDocument62 pagesObjective Type Question or MCQ of Transmission and Distributionkibrom atsbha83% (18)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Question Paper Code: 55333: B.E./B.Tech. DEGREE EXAMINATIONS, NOV./DEC. 2011 Regulations 2008Document3 pagesQuestion Paper Code: 55333: B.E./B.Tech. DEGREE EXAMINATIONS, NOV./DEC. 2011 Regulations 2008kibrom atsbhaNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Multiple Choice Question (MCQ) of D.C. MachinesDocument26 pagesMultiple Choice Question (MCQ) of D.C. Machineskibrom atsbha100% (2)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- PRPDocument4 pagesPRPkibrom atsbhaNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Multiple Choice Question (MCQ) of MeasurementsDocument60 pagesMultiple Choice Question (MCQ) of Measurementskibrom atsbhaNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Objective Type Question or MCQ of Electrical Circuits and Magnetic FieldsDocument76 pagesObjective Type Question or MCQ of Electrical Circuits and Magnetic Fieldskibrom atsbha100% (2)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Multiple Choice Question (MCQ) of Induction MotorsDocument18 pagesMultiple Choice Question (MCQ) of Induction Motorskibrom atsbha75% (4)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Multiple Choice Question (MCQ) of ElectronicsDocument64 pagesMultiple Choice Question (MCQ) of Electronicskibrom atsbhaNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Multiple Choice Question (MCQ) of ElectronicsDocument64 pagesMultiple Choice Question (MCQ) of Electronicskibrom atsbhaNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Multiple Choice Question (MCQ) of Control SystemsDocument27 pagesMultiple Choice Question (MCQ) of Control Systemskibrom atsbha67% (6)
- MCQ of Electrical MachinesDocument78 pagesMCQ of Electrical Machineskibrom atsbhaNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Multiple Choice Question (MCQ) of Alternator and Synchronous Motors PageDocument29 pagesMultiple Choice Question (MCQ) of Alternator and Synchronous Motors Pagekibrom atsbha0% (1)
- MCQ of TransformersDocument26 pagesMCQ of Transformerskibrom atsbha67% (3)
- Interview Questions of Basic ElectricityDocument14 pagesInterview Questions of Basic Electricitykibrom atsbhaNo ratings yet
- MCQ of D.C GeneratorsDocument29 pagesMCQ of D.C Generatorskibrom atsbha50% (2)
- Chemical Engineering Department College of Engineering and Technology Adigrat UniversityDocument33 pagesChemical Engineering Department College of Engineering and Technology Adigrat Universitykibrom atsbhaNo ratings yet
- Generated by CamscannerDocument11 pagesGenerated by Camscannerkibrom atsbhaNo ratings yet
- Interview Question of Underground CableDocument18 pagesInterview Question of Underground Cablekibrom atsbha100% (1)
- MCQ of Basic ElectricalDocument11 pagesMCQ of Basic Electricalkibrom atsbhaNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- MCQ of D.C MotorDocument10 pagesMCQ of D.C Motorkibrom atsbhaNo ratings yet
- Unit-4 Insulators and Cables: ConductorsDocument12 pagesUnit-4 Insulators and Cables: Conductorskibrom atsbhaNo ratings yet
- 8086 Addressing ModesDocument63 pages8086 Addressing Modeskibrom atsbhaNo ratings yet
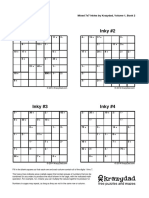
- Inky #1 Inky #2: Mixed 7x7 Inkies by Krazydad, Volume 1, Book 2Document3 pagesInky #1 Inky #2: Mixed 7x7 Inkies by Krazydad, Volume 1, Book 2AparNo ratings yet
- Beira International School: End of Year ExaminationDocument7 pagesBeira International School: End of Year ExaminationnothandoNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Fuzzy Hungarian Method For Solving Intuitionistic FuzzyDocument7 pagesFuzzy Hungarian Method For Solving Intuitionistic Fuzzybima sentosaNo ratings yet
- Global Curve Fitting of Frequency Response Measurements Using The Rational Fraction Polynomial MethodDocument8 pagesGlobal Curve Fitting of Frequency Response Measurements Using The Rational Fraction Polynomial MethodOscar Daga CaravantesNo ratings yet
- NMCV Important QuestionsDocument1 pageNMCV Important QuestionsdfdfdNo ratings yet
- 2021 S5 1 Exam (M2) - E SolutionDocument12 pages2021 S5 1 Exam (M2) - E SolutionAnderson LamNo ratings yet
- LPPDocument19 pagesLPPyashvantNo ratings yet
- Polynomials Roots InvestigationDocument6 pagesPolynomials Roots InvestigationMadison HalesNo ratings yet
- Math 8 QTR 3 Week 4Document10 pagesMath 8 QTR 3 Week 4JillianNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Zlib - Pub Computational InteractionDocument433 pagesZlib - Pub Computational InteractionASDSADNo ratings yet
- Brief Borwein IntegralsDocument11 pagesBrief Borwein IntegralsTune LisNo ratings yet
- Bank Probationary Officer Reasoning Ability Problem SolvingDocument15 pagesBank Probationary Officer Reasoning Ability Problem SolvingHemanand BeheraNo ratings yet
- Mathematics-III ME CE-BSM-301Document2 pagesMathematics-III ME CE-BSM-301Shresth SanskarNo ratings yet
- Prediction Paper 2 0580 May 2024Document11 pagesPrediction Paper 2 0580 May 2024minati0830100% (6)
- Eee 326 Lecture Notes 1Document38 pagesEee 326 Lecture Notes 1Barış DuranNo ratings yet
- Topic:: PercentageDocument22 pagesTopic:: PercentageS YESHWANTH GururajNo ratings yet
- Unit2-Notes Ai UpdatedDocument36 pagesUnit2-Notes Ai UpdatedDhivakar SenthilNo ratings yet
- Chapter 9: Center of Gravity and CentroidDocument10 pagesChapter 9: Center of Gravity and CentroidvictorNo ratings yet
- 4.1 Quadratic EquationsDocument25 pages4.1 Quadratic EquationsRohan padloskarNo ratings yet
- Detailed Lesson Plan DivisionDocument12 pagesDetailed Lesson Plan DivisionDarlin Shane SanguirNo ratings yet
- Ulangkaji Bab 1-8 (Picked)Document4 pagesUlangkaji Bab 1-8 (Picked)Yokky KowNo ratings yet
- Pure MathematicsDocument12 pagesPure MathematicsFrancis HDNo ratings yet
- 2020 ADP Nonlinear System Mismatched Disterbances 2Document8 pages2020 ADP Nonlinear System Mismatched Disterbances 2Khải VũNo ratings yet
- Homework Problems: X X y yDocument6 pagesHomework Problems: X X y yss_nainamohammedNo ratings yet
- Assignment 5 Stat Inf b3 2022 2023 PDFDocument16 pagesAssignment 5 Stat Inf b3 2022 2023 PDFMrinmoy BanikNo ratings yet
- IA Notes Session 1Document29 pagesIA Notes Session 1asalifew belachewNo ratings yet
- Detailed Lesson Plan in MathematicsDocument10 pagesDetailed Lesson Plan in MathematicsMelody MegrinioNo ratings yet
- Mech 311 Formula Sheet For Final ExamDocument3 pagesMech 311 Formula Sheet For Final ExamJonathon Raymond-SzewczukNo ratings yet
- Ti-84 Plus Ce-T enDocument76 pagesTi-84 Plus Ce-T enpiyush raghavNo ratings yet
- Question Bank: Short Answer Type QuestionsDocument29 pagesQuestion Bank: Short Answer Type QuestionsArun UpadhyayNo ratings yet
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)From EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No ratings yet
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)