You might also like
- 4 - Ensure Freedom From Interference FFI For ASIL Applications - TASKINGDocument19 pages4 - Ensure Freedom From Interference FFI For ASIL Applications - TASKINGDumitru IngeauaNo ratings yet
- Automatic ASIL DecompositionDocument18 pagesAutomatic ASIL Decompositions.b.v.seshagiri1407No ratings yet
- UDS Protocol Implementation in Automotiv PDFDocument6 pagesUDS Protocol Implementation in Automotiv PDFviernes06No ratings yet
- CSW - White Paper - Automotive - The Use of Multi-Core Processors in The Automotive IndustryDocument5 pagesCSW - White Paper - Automotive - The Use of Multi-Core Processors in The Automotive IndustryRudrappa ShettiNo ratings yet
- Autom Motiv e Hard Dware ISO e Deve O 262 Elopm 262 Ment A Accord Ing To oDocument5 pagesAutom Motiv e Hard Dware ISO e Deve O 262 Elopm 262 Ment A Accord Ing To orahul1990bhatiaNo ratings yet
- 05 - Lesson 3 Safety Frameworks For Self Driving - C1M3L3 - Safety - Frameworks - For - Self Driving PDFDocument24 pages05 - Lesson 3 Safety Frameworks For Self Driving - C1M3L3 - Safety - Frameworks - For - Self Driving PDFprogisNo ratings yet
- Security and Safety in Embedded ApplicationsDocument14 pagesSecurity and Safety in Embedded ApplicationsLinh Lê QuangNo ratings yet
- Autosar Communication Stack Implementation With Flexray: Johan Elgered Jesper JanssonDocument55 pagesAutosar Communication Stack Implementation With Flexray: Johan Elgered Jesper JanssonXuân ToànNo ratings yet
- AUTOSAR Software Engineering PraktikumDocument10 pagesAUTOSAR Software Engineering PraktikumFarwa ZahidNo ratings yet
- AUTOSAR For Dummies - #10 - AUTOSAR and ISO26262 - Automotive ElectronicsDocument5 pagesAUTOSAR For Dummies - #10 - AUTOSAR and ISO26262 - Automotive ElectronicsSameer KumthekarNo ratings yet
- AUTOSAR BasicSoftwareModulesDocument21 pagesAUTOSAR BasicSoftwareModulesNandiniNo ratings yet
- Accelerating Motor Control Design For Functional Safety PDFDocument11 pagesAccelerating Motor Control Design For Functional Safety PDFLuu TinhNo ratings yet
- Applied Sciences: Safety-Oriented System Hardware Architecture Exploration in Compliance With ISO 26262Document29 pagesApplied Sciences: Safety-Oriented System Hardware Architecture Exploration in Compliance With ISO 26262Girish KasturiNo ratings yet
- ERTS - 2018 - Paper - 46 2Document10 pagesERTS - 2018 - Paper - 46 2Hesham YaseinNo ratings yet
- Lesson19 Autosar PDFDocument170 pagesLesson19 Autosar PDFBura RoxanaNo ratings yet
- CV Resume NaderJSA En03 PDFDocument3 pagesCV Resume NaderJSA En03 PDFazitaggNo ratings yet
- AUTOSAR and Functional Safety PDFDocument26 pagesAUTOSAR and Functional Safety PDFbnd1uNo ratings yet
- Dspace-Paper Hil Overview Waeltermann e 160405 PDFDocument14 pagesDspace-Paper Hil Overview Waeltermann e 160405 PDFPranay VermaNo ratings yet
- Master's Thesis: Model-Based Testing With Simulink Design VerifierDocument93 pagesMaster's Thesis: Model-Based Testing With Simulink Design VerifierBalajee AsokanNo ratings yet
- SDV EbookDocument59 pagesSDV EbookYogan SriNo ratings yet
- Shuvra Das - Modeling For Hybrid and Electric Vehicles Using Simscape-Morgan & Claypool Publishers (2021)Document219 pagesShuvra Das - Modeling For Hybrid and Electric Vehicles Using Simscape-Morgan & Claypool Publishers (2021)Borislav BrnjadaNo ratings yet
- Compiler (Very Imp.)Document10 pagesCompiler (Very Imp.)Saleh TarekNo ratings yet
- Simulink-Targetlink Datatypes Defnt ProblemDocument16 pagesSimulink-Targetlink Datatypes Defnt ProblemmonisivaNo ratings yet
- 07.TAI Seminar WHAT Is FUNCTIONAL SAFETY BKK 25june2015 HandsoutDocument33 pages07.TAI Seminar WHAT Is FUNCTIONAL SAFETY BKK 25june2015 HandsoutsunithaNo ratings yet
- CHAPTER 1: AUTOSAR Fundamentals Topics CoveredDocument14 pagesCHAPTER 1: AUTOSAR Fundamentals Topics CoveredSujit KumarNo ratings yet
- Red Bend Update Car Ecu PDFDocument14 pagesRed Bend Update Car Ecu PDFtomsiriNo ratings yet
- SAFE - Final Specification For Comparison of ArchitectureDocument74 pagesSAFE - Final Specification For Comparison of ArchitectureimadNo ratings yet
- Autosar Pro ConsDocument8 pagesAutosar Pro ConsYaseen YaseenNo ratings yet
- Session22-A-SPICE Compliance Made Easy Case Studies and Lessons LearnedDocument49 pagesSession22-A-SPICE Compliance Made Easy Case Studies and Lessons LearnedHaissamNo ratings yet
- Automotive SPICE Process Reference Model: TitleDocument47 pagesAutomotive SPICE Process Reference Model: TitleHoa LuuNo ratings yet
- Basics of automotive electronics: Understanding controller area networks (CANDocument11 pagesBasics of automotive electronics: Understanding controller area networks (CANkrishaNo ratings yet
- UDS Protocol Diagnostics CommunicationDocument6 pagesUDS Protocol Diagnostics CommunicationaravindNo ratings yet
- D2A1 1 2 ESL Virtual Hardware SetupDocument15 pagesD2A1 1 2 ESL Virtual Hardware SetupRaj Shekhar ReddyNo ratings yet
- Reed Switch Interfacing With ArduinoDocument10 pagesReed Switch Interfacing With Arduino27051977No ratings yet
- Autosar PPTDocument10 pagesAutosar PPTRahul WaliNo ratings yet
- TargetLink Product-InformationDocument48 pagesTargetLink Product-Informationmazher_ecNo ratings yet
- Rimac Automobili Cybersecurity EngDocument1 pageRimac Automobili Cybersecurity EngudbarryNo ratings yet
- ASIL (ISO 26262) DecompositionDocument39 pagesASIL (ISO 26262) DecompositionMadhusudhanan RavishankarNo ratings yet
- Identification & Mitigation of Potential Failures of Automotive Hvac Air Management System Using Failure Mode & Effects AnalysisDocument8 pagesIdentification & Mitigation of Potential Failures of Automotive Hvac Air Management System Using Failure Mode & Effects Analysisashishmechengg31No ratings yet
- Simulink Coder 8.0: Generate C and C++ Code From Simulink and Stateflow ModelsDocument6 pagesSimulink Coder 8.0: Generate C and C++ Code From Simulink and Stateflow ModelsVijayalaxmi BiradarNo ratings yet
- UDS Vehicle Diagnostics in AUTOSAR SoftwareDocument10 pagesUDS Vehicle Diagnostics in AUTOSAR SoftwareEmbitel TechnologiesNo ratings yet
- MISRA C-Some Key Rules To Make Embedded Systems Safer PDFDocument3 pagesMISRA C-Some Key Rules To Make Embedded Systems Safer PDFLeiser HartbeckNo ratings yet
- Diagnosis For in Vehicle NetworksDocument26 pagesDiagnosis For in Vehicle NetworksSayyedNo ratings yet
- Polarion Requirements Fact-SheetDocument2 pagesPolarion Requirements Fact-SheetgabrielvadNo ratings yet
- Job Opportunity Bootloader Specialist at Elektrobit Automotive GMBH Jobportal1Document3 pagesJob Opportunity Bootloader Specialist at Elektrobit Automotive GMBH Jobportal1krishaNo ratings yet
- AUTOSAR LayeredSoftwareArchitectureDocument46 pagesAUTOSAR LayeredSoftwareArchitectureGiridharNo ratings yet
- vSES21 Slides 03 Kriso BoschDocument20 pagesvSES21 Slides 03 Kriso BoschMohamed HegazyNo ratings yet
- Error-Correcting Codes For Semiconductor Memory Applications: A State-of-the-Art ReviewDocument11 pagesError-Correcting Codes For Semiconductor Memory Applications: A State-of-the-Art Reviewsri devi100% (1)
- MICROSAR ProductInformation enDocument92 pagesMICROSAR ProductInformation ensrikanthboddunaNo ratings yet
- Functional Safety Considerations in Battery DesignDocument6 pagesFunctional Safety Considerations in Battery DesignMarian VerdeNo ratings yet
- ISO 26262 Overview: Achieving Functional SafetyDocument19 pagesISO 26262 Overview: Achieving Functional SafetySrinivasan VenkatNo ratings yet
- IEC Certification Kit: Model-Based Design For ISO 26262Document31 pagesIEC Certification Kit: Model-Based Design For ISO 26262Ícaro VianaNo ratings yet
- Introduction To HIL Simulation - 2Document12 pagesIntroduction To HIL Simulation - 2Kavuri Sai PradeepNo ratings yet
- Advanced Driver Assistance (ADAS) Solutions GuideDocument29 pagesAdvanced Driver Assistance (ADAS) Solutions GuideDharmody0% (1)
- AGL Functinal Safety (Youngsu Kwon) (r13)Document54 pagesAGL Functinal Safety (Youngsu Kwon) (r13)v53No ratings yet
- Automotive Safety Integrity Level A Complete Guide - 2020 EditionFrom EverandAutomotive Safety Integrity Level A Complete Guide - 2020 EditionNo ratings yet
- Gowda2019 ECU Inter - Processor Data CommunicationDocument11 pagesGowda2019 ECU Inter - Processor Data Communications.b.v.seshagiri1407No ratings yet
- ICCE Presentation On VESA Display PortDocument40 pagesICCE Presentation On VESA Display Porthithot2008No ratings yet
- Gowda2019 ECU Inter - Processor Data CommunicationDocument11 pagesGowda2019 ECU Inter - Processor Data Communications.b.v.seshagiri1407No ratings yet
- Pmic Safety Detroit TechdayDocument61 pagesPmic Safety Detroit Techdays.b.v.seshagiri1407No ratings yet
- Quality requirements for samples: Schematic presentation for the use of samples according to the degree of maturityDocument3 pagesQuality requirements for samples: Schematic presentation for the use of samples according to the degree of maturitys.b.v.seshagiri1407No ratings yet
- Adc Student: Andrew Brown Jonathan Warner Laura StricklandDocument51 pagesAdc Student: Andrew Brown Jonathan Warner Laura Stricklands.b.v.seshagiri1407No ratings yet
- ZD 007 Sample Definition Project Management ENDocument1 pageZD 007 Sample Definition Project Management ENs.b.v.seshagiri1407No ratings yet
- Slyt 581Document5 pagesSlyt 581ajoaomvNo ratings yet
- George2016 Writing Good Techincal Safety RequirementsDocument9 pagesGeorge2016 Writing Good Techincal Safety Requirementss.b.v.seshagiri14070% (1)
- 320 Lecture 3Document10 pages320 Lecture 3s.b.v.seshagiri1407No ratings yet
- AURIX MultiCore Lauterbach HandoutDocument56 pagesAURIX MultiCore Lauterbach Handouts.b.v.seshagiri1407No ratings yet
- P11Document22 pagesP11s.b.v.seshagiri1407No ratings yet
- Analytical Study of Sense AmplifierDocument5 pagesAnalytical Study of Sense Amplifiers.b.v.seshagiri1407No ratings yet
- Elec Chap 3Document28 pagesElec Chap 3Giezel RevisNo ratings yet
- L17 FET DC AnalysisDocument19 pagesL17 FET DC Analysiss.b.v.seshagiri1407No ratings yet
- Reliability and Failure Analysis of Electronic Components: by Dr. Charles Surya, ENC CD 636, ×6220 Ensurya@polyu - Edu.hkDocument61 pagesReliability and Failure Analysis of Electronic Components: by Dr. Charles Surya, ENC CD 636, ×6220 Ensurya@polyu - Edu.hkhariprasad_pentiNo ratings yet
- Lecture10 MOS Transistor Circuit AnalysisDocument22 pagesLecture10 MOS Transistor Circuit AnalysisKartika MunirNo ratings yet
- Elec Chap 3Document28 pagesElec Chap 3Giezel RevisNo ratings yet
- Analog ElectronicsDocument254 pagesAnalog ElectronicsNithindev GuttikondaNo ratings yet
- Sensors Used in Power Sources For IoEDocument33 pagesSensors Used in Power Sources For IoEKiran KirruNo ratings yet
- LFI 2015 - DL Lunch Learn SlidesDocument61 pagesLFI 2015 - DL Lunch Learn Slidess.b.v.seshagiri1407No ratings yet
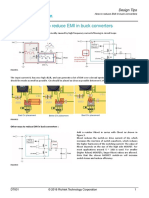
- EMI Design TipsDocument3 pagesEMI Design Tipss.b.v.seshagiri1407No ratings yet
- 07 DRITSANOS IoT-Conference Schneider-ElectricDocument13 pages07 DRITSANOS IoT-Conference Schneider-Electrics.b.v.seshagiri1407No ratings yet
- S2P5 Gyu Myoung LeeDocument20 pagesS2P5 Gyu Myoung Lees.b.v.seshagiri1407No ratings yet
- AppNote - ProfetOperatingModes - V1 0 - 07-2011 PDFDocument16 pagesAppNote - ProfetOperatingModes - V1 0 - 07-2011 PDFs.b.v.seshagiri1407100% (1)
- FET Current-Mirror Examples Common-Source Amplifier: 1 2 3 REF 3 2 2 3 2 REFDocument5 pagesFET Current-Mirror Examples Common-Source Amplifier: 1 2 3 REF 3 2 2 3 2 REFManpreet SinghNo ratings yet
- Automotive Mosfets in Linear Applications: Thermal InstabilityDocument6 pagesAutomotive Mosfets in Linear Applications: Thermal Instabilitys.b.v.seshagiri1407No ratings yet
- Lect 22 MOSFET Current Mirror and CS Amplifier PDFDocument10 pagesLect 22 MOSFET Current Mirror and CS Amplifier PDFs.b.v.seshagiri1407No ratings yet
- GPON Fundamentals NewDocument58 pagesGPON Fundamentals Newlevanthanhewsd100% (2)
- Circuit Wizard - SW 003 Out - CWZDocument1 pageCircuit Wizard - SW 003 Out - CWZGonzalez ErickNo ratings yet
- AH Series PLC Automation SolutionDocument52 pagesAH Series PLC Automation SolutionXiaofeng XuNo ratings yet
- 7805 Voltage RegulatorDocument3 pages7805 Voltage Regulatormukesh80125100% (1)
- FPGA Programming TechnologiesDocument26 pagesFPGA Programming TechnologiesRahamtulla MohammadNo ratings yet
- LPVLSIDocument25 pagesLPVLSIAnil Kumar YernintiNo ratings yet
- Manual VHS-DVD Samsung Sv-Dvd1eDocument38 pagesManual VHS-DVD Samsung Sv-Dvd1eClara M. HidalgoNo ratings yet
- Design of Very Large Scale Integration CircuitsDocument30 pagesDesign of Very Large Scale Integration CircuitsStudentNo ratings yet
- Manual Pce Ut603.pdfsfDocument14 pagesManual Pce Ut603.pdfsfAnees Ahmed KzNo ratings yet
- Instantaneous CSI (Or Short-Term CSI) Means That The Current Channel Conditions Are KnownDocument16 pagesInstantaneous CSI (Or Short-Term CSI) Means That The Current Channel Conditions Are KnownkiyaNo ratings yet
- Philco Ph32f33dg Led FonteDocument4 pagesPhilco Ph32f33dg Led FonteOtávio Sbaraini86% (7)
- Rsdcom: Commercial Rapid Shutdown CombinerDocument2 pagesRsdcom: Commercial Rapid Shutdown CombinerBaggi NNo ratings yet
- DSL Technologies1Document39 pagesDSL Technologies1Mohammed AatifNo ratings yet
- LCG2Document35 pagesLCG2Chakroune100% (3)
- Vipa Cpu 200V ImDocument348 pagesVipa Cpu 200V Imjito_uscalNo ratings yet
- Philips DVD740VRDocument107 pagesPhilips DVD740VRf17439No ratings yet
- IRI1-ER - Stablized Earth Fault Current RelayDocument16 pagesIRI1-ER - Stablized Earth Fault Current Relayrajinipre-1100% (1)
- DCEPFDocument11 pagesDCEPFkanishkhatanaNo ratings yet
- Pioneer VSX 519v K VSX 519v SDocument94 pagesPioneer VSX 519v K VSX 519v SDamir VidakovicNo ratings yet
- UltraFast IGBT Datasheet SummaryDocument8 pagesUltraFast IGBT Datasheet Summarysadhanabhawani1278No ratings yet
- Audio Consoles: The International Buyer'S GuideDocument52 pagesAudio Consoles: The International Buyer'S GuidelesoundNo ratings yet
- Bose - Lifestyle CD-5 - Service ManualDocument70 pagesBose - Lifestyle CD-5 - Service ManualStevenNo ratings yet
- Manual: Multi-Platform Universal TFT Display LibraryDocument9 pagesManual: Multi-Platform Universal TFT Display LibraryAnil SainiNo ratings yet
- Module 4 PeripheralsDocument13 pagesModule 4 PeripheralsMohd HafiezNo ratings yet
- Aircraft Radio SystemsDocument259 pagesAircraft Radio SystemsEdward Muriithi100% (2)
- MTL 5995Document1 pageMTL 5995bolmaticaNo ratings yet
- Trans Z AmplifierDocument19 pagesTrans Z AmplifierTrinh TranNo ratings yet
- Experiment No. 8 AIM: To Design Third and Fifth Order Prototype Butterworth and Chebyshev Low PassDocument11 pagesExperiment No. 8 AIM: To Design Third and Fifth Order Prototype Butterworth and Chebyshev Low PassBibek BoxiNo ratings yet
- Measuring Thiele Small ParametersDocument6 pagesMeasuring Thiele Small ParametersIrfangiNo ratings yet
- Tektronix TDS 320 Two Channel OscilloscopeDocument200 pagesTektronix TDS 320 Two Channel OscilloscopeAnonymous BW9mIv22N0% (1)