You might also like
- Service Oriented Computing in RoboticDocument14 pagesService Oriented Computing in RoboticDaredevils MarvelNo ratings yet
- A Proposal On Robotics Using Cloud Computing IJERTCONV2IS10010Document5 pagesA Proposal On Robotics Using Cloud Computing IJERTCONV2IS10010AddisuNo ratings yet
- Cloud Computing in Resource ManagementDocument6 pagesCloud Computing in Resource ManagementIJEMR JournalNo ratings yet
- Indecs2015 pp26 33Document8 pagesIndecs2015 pp26 33fuckuyNo ratings yet
- Robotics 07 00047 PDFDocument25 pagesRobotics 07 00047 PDFRaj ShahNo ratings yet
- Brainware Computing Concepts Scopes and ChallengesDocument20 pagesBrainware Computing Concepts Scopes and ChallengesSalsabila Aurellya BachtiarNo ratings yet
- Internet of Robotic Things Concept Technologies and ChallengesDocument12 pagesInternet of Robotic Things Concept Technologies and ChallengesyuvaraniveerasamyNo ratings yet
- To Implement Data Security in Cloud Computing Environment: Mr.S.P.PATIL, Mr.H.E.Khodke, Mr.P.B.LandgeDocument5 pagesTo Implement Data Security in Cloud Computing Environment: Mr.S.P.PATIL, Mr.H.E.Khodke, Mr.P.B.LandgeManimurugan MNo ratings yet
- 1er 2009 - Cunsolo - Volunteer Computing and Desktop Cloud - The Cloud@Home ParadigmDocument6 pages1er 2009 - Cunsolo - Volunteer Computing and Desktop Cloud - The Cloud@Home ParadigmJOSE GABRIEL CORTAZAR OCAMPONo ratings yet
- RoboticsDocument15 pagesRoboticsRitika waghamareNo ratings yet
- Emerging Trends of Cloud Computing: AbstractDocument5 pagesEmerging Trends of Cloud Computing: AbstractEditor IJRITCCNo ratings yet
- Cloud Computing: By: Syed Aizaz Ul HaqDocument20 pagesCloud Computing: By: Syed Aizaz Ul HaqFaridullah SahilNo ratings yet
- Cloud RoboticsDocument24 pagesCloud RoboticsJayendra SinghNo ratings yet
- Cloud Computer SlidesDocument160 pagesCloud Computer SlidesKhuram ShahzadNo ratings yet
- Introduction to Cloud Computing: Key Concepts and HistoryDocument15 pagesIntroduction to Cloud Computing: Key Concepts and HistoryAakash SoniNo ratings yet
- Cloud Computing in A View: Cloud Computing Is A General Term For Anything That Involves DeliveringDocument9 pagesCloud Computing in A View: Cloud Computing Is A General Term For Anything That Involves DeliveringGrace ShankarNo ratings yet
- Cloud ComputationDocument12 pagesCloud ComputationKakashi 12No ratings yet
- Seminar ReportDocument4 pagesSeminar ReportvoidimagineerNo ratings yet
- Eti Micro ProjectDocument15 pagesEti Micro ProjectRed Light HackersNo ratings yet
- Cloud Computing-The Emerging Computing Paradigm For The 21st Century and AheadDocument12 pagesCloud Computing-The Emerging Computing Paradigm For The 21st Century and AheadGovindaraamayya YeluripatiNo ratings yet
- ACTA Research Papers On RoboticsDocument4 pagesACTA Research Papers On RoboticsYash BeleNo ratings yet
- 1 PDFDocument5 pages1 PDFjulietamuraliNo ratings yet
- Cloud Robotics Survey Covers Benefits and TechnologiesDocument5 pagesCloud Robotics Survey Covers Benefits and TechnologiesRavi SrinivasNo ratings yet
- Cloud Computing For Education A New Dawn 2010 International Journal of Information ManagementDocument8 pagesCloud Computing For Education A New Dawn 2010 International Journal of Information ManagementKhizer SikanderNo ratings yet
- Cloud Computing and Satellite ImageryDocument9 pagesCloud Computing and Satellite ImageryAnupam TiwariNo ratings yet
- Reaching For The Cloud How SMEs Can ManageDocument7 pagesReaching For The Cloud How SMEs Can ManageLaiNo ratings yet
- B. Discuss Key Enabling Technologies in Cloud Computing SystemsDocument3 pagesB. Discuss Key Enabling Technologies in Cloud Computing SystemsMuveenaNo ratings yet
- Chapter - 1: Introduction To Cloud ComputingDocument36 pagesChapter - 1: Introduction To Cloud ComputingPreet ChahalNo ratings yet
- Cloud Computing: A Paper OnDocument10 pagesCloud Computing: A Paper OnARVINDNo ratings yet
- Cloud Computing Technology: Master of Computer ApplicationDocument24 pagesCloud Computing Technology: Master of Computer ApplicationChristina PerryNo ratings yet
- A Review Paper On Cloud Computing: Nikhil RanjanDocument6 pagesA Review Paper On Cloud Computing: Nikhil RanjanNikhil Ranjan 211No ratings yet
- A Survey of Research On Cloud Robotics and AutomationDocument12 pagesA Survey of Research On Cloud Robotics and AutomationKannadhasan DassNo ratings yet
- 12IEEENT HuTayWenCloudRoboticsDocument9 pages12IEEENT HuTayWenCloudRoboticsDaredevils MarvelNo ratings yet
- Cloud RoboticsDocument7 pagesCloud RoboticsDaredevils MarvelNo ratings yet
- CloudcomputingDocument29 pagesCloudcomputingKARAN MASTERNo ratings yet
- Cloud computing explainedDocument11 pagesCloud computing explainedSudhakar RamanNo ratings yet
- Cloud Computing: End Term PaperDocument17 pagesCloud Computing: End Term PaperPraveen TrivediNo ratings yet
- Google Amazon Microsoft IoT ComparisonDocument16 pagesGoogle Amazon Microsoft IoT ComparisonBee MUNo ratings yet
- Cloud Computing With EyeosDocument45 pagesCloud Computing With EyeosSumit Ahuja100% (1)
- A Survey of IoT Cloud ProvidersDocument6 pagesA Survey of IoT Cloud ProvidersAmir AzrenNo ratings yet
- Cloud Computing: Futuristic Aspects ofDocument27 pagesCloud Computing: Futuristic Aspects ofnkNo ratings yet
- 2009 Fifth International Joint Conference On INC, IMS and IDC 2009 Fifth International Joint Conference On INC, IMS and IDCDocument8 pages2009 Fifth International Joint Conference On INC, IMS and IDC 2009 Fifth International Joint Conference On INC, IMS and IDCSmitha VasNo ratings yet
- MATERIALSDocument16 pagesMATERIALSHorlars LeeNo ratings yet
- Job Scheduling in Cloud Computing: A Review of Selected TechniquesDocument5 pagesJob Scheduling in Cloud Computing: A Review of Selected TechniquesInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- IRJET-Review On Virtual Machine Resource Allocation in Cloud-Fog Computing SystemsDocument5 pagesIRJET-Review On Virtual Machine Resource Allocation in Cloud-Fog Computing SystemsAnonymous O8S6PMXlWcNo ratings yet
- Cloud Robotics (Tech Seminar)Document19 pagesCloud Robotics (Tech Seminar)Aarathi Sree100% (2)
- Chapter 2 Literature ReviewDocument21 pagesChapter 2 Literature ReviewNazaf AzmiNo ratings yet
- Robotic Surgery: A Report OnDocument21 pagesRobotic Surgery: A Report Onud.adamsNo ratings yet
- Cloud ComputingDocument3 pagesCloud ComputingAkash RajputNo ratings yet
- Cloud Computing Framework Enables Service Robots to Share MapsDocument7 pagesCloud Computing Framework Enables Service Robots to Share MapsnathalieNo ratings yet
- Most Important FileDocument9 pagesMost Important FileArun Be AzureNo ratings yet
- Keyword Specific Cloud ComputingDocument3 pagesKeyword Specific Cloud ComputingIJAERS JOURNALNo ratings yet
- Virtualizing The Private Cloud For Maximum Resource UtilizationDocument5 pagesVirtualizing The Private Cloud For Maximum Resource UtilizationIjarcet JournalNo ratings yet
- Advanced Survey On Ultra-Modern Cloud Computing TechnologyDocument5 pagesAdvanced Survey On Ultra-Modern Cloud Computing TechnologyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Reviewing Some Platforms in CloudDocument6 pagesReviewing Some Platforms in CloudjamesgismoNo ratings yet
- Cloud Computing: A Perspective Study: Received 1 Dec 2008Document10 pagesCloud Computing: A Perspective Study: Received 1 Dec 2008krmrzaNo ratings yet
- CLOUD COMPUTING REPORT FinalDocument26 pagesCLOUD COMPUTING REPORT FinalSinghhNo ratings yet
- Cloud Computing: Harnessing the Power of the Digital Skies: The IT CollectionFrom EverandCloud Computing: Harnessing the Power of the Digital Skies: The IT CollectionNo ratings yet
- 2016 Symbiotic Organisms Search For Optimum DesignDocument15 pages2016 Symbiotic Organisms Search For Optimum DesignalfonsoNo ratings yet
- 2010 Artificial Bee Colony Algorithm For Optimization of Truss StructuresDocument5 pages2010 Artificial Bee Colony Algorithm For Optimization of Truss StructuresalfonsoNo ratings yet
- Optimal Truss Design Using Genetic AlgorithmsDocument18 pagesOptimal Truss Design Using Genetic AlgorithmsalfonsoNo ratings yet
- Non-Linear Analysis of Structural Steel FramesDocument22 pagesNon-Linear Analysis of Structural Steel FramesalfonsoNo ratings yet
- Functionally Graded Materials 2017Document118 pagesFunctionally Graded Materials 2017alfonsoNo ratings yet
- 2008 Robustness of Composite Floor Systems With ShearDocument9 pages2008 Robustness of Composite Floor Systems With ShearalfonsoNo ratings yet
- 2000 Optimum Spacing Design of Grillage Systems Using A Genetic AlgorithmDocument11 pages2000 Optimum Spacing Design of Grillage Systems Using A Genetic AlgorithmalfonsoNo ratings yet
- 2017 Tying Capacity of Web Cleat Connections in Fire Part 2Document12 pages2017 Tying Capacity of Web Cleat Connections in Fire Part 2alfonsoNo ratings yet
- A Novel Compliant Linear-Motion Mechanism Based On Parasitic MOTION COMPESATIONDocument14 pagesA Novel Compliant Linear-Motion Mechanism Based On Parasitic MOTION COMPESATIONalfonsoNo ratings yet
- Analysis of Parasitic Motion in Parallelogram Compliant Mechanism 2010Document6 pagesAnalysis of Parasitic Motion in Parallelogram Compliant Mechanism 2010alfonsoNo ratings yet
- 2011 Optimization of Steel Floor Systems Using Particle Swarm OptimizationDocument7 pages2011 Optimization of Steel Floor Systems Using Particle Swarm OptimizationalfonsoNo ratings yet
- RakMek 43 1 2010 3Document19 pagesRakMek 43 1 2010 3Manuel ValenteNo ratings yet
- Analysis of Natural Frequencies of Cantilever Beam Using Ansys 2017 PDFDocument5 pagesAnalysis of Natural Frequencies of Cantilever Beam Using Ansys 2017 PDFalfonsoNo ratings yet
- Design of Compliant Mechanisms Applications To MEMSDocument10 pagesDesign of Compliant Mechanisms Applications To MEMSalfonsoNo ratings yet
- Photocatalytic Abatement of NOx Pollutants in The Air Using Commercial Functional Coating With Porous Morphology 2017Document20 pagesPhotocatalytic Abatement of NOx Pollutants in The Air Using Commercial Functional Coating With Porous Morphology 2017alfonsoNo ratings yet
- International Journal of Heat and Mass Transfer: Sławomir Dykas, Włodzimierz WróblewskiDocument9 pagesInternational Journal of Heat and Mass Transfer: Sławomir Dykas, Włodzimierz WróblewskialfonsoNo ratings yet
- Effect of SiO2 Coating On Photoluminescence and Thermal Stability 2008Document5 pagesEffect of SiO2 Coating On Photoluminescence and Thermal Stability 2008alfonsoNo ratings yet
- Post-Limit Stiffness and Ductility PDFDocument17 pagesPost-Limit Stiffness and Ductility PDFalfonsoNo ratings yet
- 2004 ELASTO PLASTIC FE ANALYSIS ON MOMENT ROTATION Relations of Top and Seat Angle Connections PDFDocument10 pages2004 ELASTO PLASTIC FE ANALYSIS ON MOMENT ROTATION Relations of Top and Seat Angle Connections PDFalfonsoNo ratings yet
- Solving Multiobjective Optimization ProblemsDocument38 pagesSolving Multiobjective Optimization ProblemsalfonsoNo ratings yet
- Leonardo Pinheiroa and Ricardo A. M. Silveira - Computational Procedures For Nonlinear Analysis of Frames With Semi-Rigid ConnectionsDocument30 pagesLeonardo Pinheiroa and Ricardo A. M. Silveira - Computational Procedures For Nonlinear Analysis of Frames With Semi-Rigid ConnectionsCristina VlaicuNo ratings yet
- Solving Multiobjective Optimization ProblemsDocument38 pagesSolving Multiobjective Optimization ProblemsalfonsoNo ratings yet
- 2001 Nonlinear Analysis of Frames With Flexible Connections PDFDocument11 pages2001 Nonlinear Analysis of Frames With Flexible Connections PDFalfonsoNo ratings yet
- A Survey of Manufacturing Oriented Topology Optimization MethodsDocument15 pagesA Survey of Manufacturing Oriented Topology Optimization MethodsalfonsoNo ratings yet
- Solving Multiobjective Optimization ProblemsDocument38 pagesSolving Multiobjective Optimization ProblemsalfonsoNo ratings yet
- Structural and Multidisciplinary Optimization Volume 32 Issue 3 2006 (Doi 10.1007/s00158-006-0021-2) S. Kitayama M. Arakawa K. Yamazaki - Penalty Function Approach For The Mixed Discrete NonlineaDocument12 pagesStructural and Multidisciplinary Optimization Volume 32 Issue 3 2006 (Doi 10.1007/s00158-006-0021-2) S. Kitayama M. Arakawa K. Yamazaki - Penalty Function Approach For The Mixed Discrete NonlineaalfonsoNo ratings yet
- 2005 Development of Practical Design Methods For Steel Structures With Semi Rigid Connections PDFDocument13 pages2005 Development of Practical Design Methods For Steel Structures With Semi Rigid Connections PDFalfonsoNo ratings yet
- A Discrete Binary Version of Particle Swarm Algorithm PDFDocument5 pagesA Discrete Binary Version of Particle Swarm Algorithm PDFJuan Sebastián Poveda GulfoNo ratings yet
- Accepted Manuscript: Applied Thermal EngineeringDocument20 pagesAccepted Manuscript: Applied Thermal EngineeringalfonsoNo ratings yet
- Multiobjective Optimization NSGAII 0Document16 pagesMultiobjective Optimization NSGAII 0Carlos Soza RossNo ratings yet
- User'S Manual: 1 - Installation 2 - Technical SpecificationsDocument8 pagesUser'S Manual: 1 - Installation 2 - Technical SpecificationsGopal HegdeNo ratings yet
- High Performance, Low Cost Microprocessor (US Patent 5530890)Document49 pagesHigh Performance, Low Cost Microprocessor (US Patent 5530890)PriorSmartNo ratings yet
- Urinary: Rachel Neto, DVM, MS, DACVP May 28 2020Document15 pagesUrinary: Rachel Neto, DVM, MS, DACVP May 28 2020Rachel AutranNo ratings yet
- Horses To Follow: Ten To Follow From Timeform'S Team of ExpertsDocument12 pagesHorses To Follow: Ten To Follow From Timeform'S Team of ExpertsNita naNo ratings yet
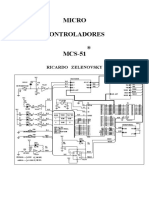
- MicroProcessadores ZelenovskyDocument186 pagesMicroProcessadores ZelenovskyDavid SantosNo ratings yet
- Angel FishDocument1 pageAngel FishWilla CrowellNo ratings yet
- Human Resource Planning and Corroporate Strategies: Meaning and Definition of StrategyDocument19 pagesHuman Resource Planning and Corroporate Strategies: Meaning and Definition of StrategyRashmi KhublaniNo ratings yet
- 2021.01 - Key-Findings - Green Bond Premium - ENDocument6 pages2021.01 - Key-Findings - Green Bond Premium - ENlypozNo ratings yet
- Dimensions of Comparative EducationDocument5 pagesDimensions of Comparative Educationeminentsurvivor9No ratings yet
- The Minecraft Survival Quest ChallengeDocument4 pagesThe Minecraft Survival Quest Challengeapi-269630780100% (1)
- Sustainability and Design EthicsDocument178 pagesSustainability and Design EthicsAbby SmithNo ratings yet
- Design Proposal For North Public & Suite Areas Decorative Lighting, Solaire Quezon CityDocument42 pagesDesign Proposal For North Public & Suite Areas Decorative Lighting, Solaire Quezon CityRichard Libunao BelduaNo ratings yet
- Ye Zindagi Aur Mujhe Fanaa KardeDocument9 pagesYe Zindagi Aur Mujhe Fanaa Kardeankur9359saxenaNo ratings yet
- 14.4 Demonstration of Leak Before Break Design Criteria For Pipes of PHT System PHWRDocument2 pages14.4 Demonstration of Leak Before Break Design Criteria For Pipes of PHT System PHWRRoman KrautschneiderNo ratings yet
- Tax - CIR Vs Cebu Toyo DigestDocument3 pagesTax - CIR Vs Cebu Toyo DigestDyannah Alexa Marie RamachoNo ratings yet
- VNL-Essar Field Trial: Nairobi-KenyaDocument13 pagesVNL-Essar Field Trial: Nairobi-Kenyapoppy tooNo ratings yet
- Return On Marketing InvestmentDocument16 pagesReturn On Marketing Investmentraj_thanviNo ratings yet
- Mo Handbook Fbimnci Apr 18, 2019Document296 pagesMo Handbook Fbimnci Apr 18, 2019Prakash Thakulla100% (1)
- The NF and BNF Charts from the Trading RoomDocument23 pagesThe NF and BNF Charts from the Trading RoomSinghRaviNo ratings yet
- Powerful Technical Computing with MathematicaDocument3 pagesPowerful Technical Computing with MathematicazoksiNo ratings yet
- Family Nursing Care PlanDocument2 pagesFamily Nursing Care PlanSophia Ella OnanNo ratings yet
- Easa Ad 2023-0133 1Document6 pagesEasa Ad 2023-0133 1Pedro LucasNo ratings yet
- SITXWHS001 Participate in Safe Work Practices - Training ManualDocument82 pagesSITXWHS001 Participate in Safe Work Practices - Training ManualIsuru AbhimanNo ratings yet
- Syed Shujauddin 124661163Document3 pagesSyed Shujauddin 124661163shujauddin11No ratings yet
- Gec220 Assignment 2Document5 pagesGec220 Assignment 2precious omokhaiyeNo ratings yet
- Aegon Life Insurance Marketing Strategy AnalysisDocument22 pagesAegon Life Insurance Marketing Strategy AnalysissalmanNo ratings yet
- Porter 5 ForcesDocument44 pagesPorter 5 ForcesSwapnil ChonkarNo ratings yet
- Currency Exchnage FormatDocument1 pageCurrency Exchnage FormatSarvjeet SinghNo ratings yet
- Nord Lock Washers Material Type GuideDocument1 pageNord Lock Washers Material Type GuideArthur ZinkeNo ratings yet
- BICs Policy 2021 - FinalDocument8 pagesBICs Policy 2021 - FinalIrfan U ShahNo ratings yet