You might also like
- Brida SwivelDocument2 pagesBrida SwivelJuan Roberto López Betanzos100% (1)
- Coatings For Saltwater PipelinesDocument11 pagesCoatings For Saltwater PipelinesEPCNo ratings yet
- Acoustic Detecting and Locating Gas Pipe PDFDocument65 pagesAcoustic Detecting and Locating Gas Pipe PDFEPCNo ratings yet
- Acoustic Detecting and Locating Gas Pipe PDFDocument65 pagesAcoustic Detecting and Locating Gas Pipe PDFEPCNo ratings yet
- Design Considerations For Offshore Shallow FoundationsDocument27 pagesDesign Considerations For Offshore Shallow FoundationsEPCNo ratings yet
- Applications of Ultrasonic Techniques in PDFDocument14 pagesApplications of Ultrasonic Techniques in PDFEPCNo ratings yet
- Confidence IntervalsDocument12 pagesConfidence IntervalsDheerajNo ratings yet
- Riser and Pipeline Corrosion Risk AssessmentDocument6 pagesRiser and Pipeline Corrosion Risk AssessmentEPCNo ratings yet
- WaveScatter PDFDocument2 pagesWaveScatter PDFEPCNo ratings yet
- More Coding in Delphi - Nick Hodges PDFDocument231 pagesMore Coding in Delphi - Nick Hodges PDFEPCNo ratings yet
- A Bayesian Approach To Retransformation Bias in Transformed RegressionDocument6 pagesA Bayesian Approach To Retransformation Bias in Transformed RegressionEPCNo ratings yet
- House of Commons - Home Affairs - Appendices To The Minutes of EvidenceDocument23 pagesHouse of Commons - Home Affairs - Appendices To The Minutes of EvidenceEPCNo ratings yet
- MMS Evaluation of High Integrity Pressure Protection SystemDocument137 pagesMMS Evaluation of High Integrity Pressure Protection SystemEyoma EtimNo ratings yet
- Bearing Capacity of SoilsDocument196 pagesBearing Capacity of Soilshare krishnaNo ratings yet
- Eliminating The Precommissioning Hydrotest For Deepwater Gas PipelinesDocument7 pagesEliminating The Precommissioning Hydrotest For Deepwater Gas PipelinesEPCNo ratings yet
- Eliminating The Precommissioning Hydrotest For Deepwater Gas PipelinesDocument7 pagesEliminating The Precommissioning Hydrotest For Deepwater Gas PipelinesEPCNo ratings yet
- Introduction To Acceptance SamplingDocument16 pagesIntroduction To Acceptance Samplingjsalu_khanNo ratings yet
- Exchange Flow of Oil and Seawater in Leaking Subsea PipelinesDocument6 pagesExchange Flow of Oil and Seawater in Leaking Subsea PipelinesEPCNo ratings yet
- Risk Matrices ConstructionDocument19 pagesRisk Matrices ConstructionEPCNo ratings yet
- Simulation of Anchor Loads On PipelinesDocument101 pagesSimulation of Anchor Loads On PipelinesEPCNo ratings yet
- Wakker Explaining CRRA FamilyDocument16 pagesWakker Explaining CRRA FamilyEPCNo ratings yet
- 2009 Wilkinson & David PDFDocument15 pages2009 Wilkinson & David PDFEPCNo ratings yet
- Judgment Against Martin LarsenDocument5 pagesJudgment Against Martin LarsenEPCNo ratings yet
- Bivariate NormalDocument2 pagesBivariate NormalEPCNo ratings yet
- Risk Based Maintenance For Compressor SystemsDocument83 pagesRisk Based Maintenance For Compressor SystemsEPCNo ratings yet
- Judgment Against EPConsult EnergiesDocument4 pagesJudgment Against EPConsult EnergiesEPCNo ratings yet
- Reference Manual Bevi Risk Assessments Version 3 2Document189 pagesReference Manual Bevi Risk Assessments Version 3 2Lakshmi Binoy MenonNo ratings yet
- Eniq TGR Technical Document: Probability of Detection Curves: Statistical Best-PracticesDocument72 pagesEniq TGR Technical Document: Probability of Detection Curves: Statistical Best-PracticesEPCNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Integrated Cost and Risk Analysis Using Monte Carlo Simulation of A CPM ModelDocument4 pagesIntegrated Cost and Risk Analysis Using Monte Carlo Simulation of A CPM ModelPavlos Vardoulakis0% (1)
- ISTJ PersonalityDocument2 pagesISTJ PersonalityMonalisa ChatterjeeNo ratings yet
- Netapp Cabling and Hardware BasicsDocument14 pagesNetapp Cabling and Hardware BasicsAnup AbhishekNo ratings yet
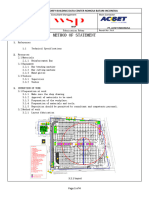
- Metode Statement of Fabrication RebarDocument11 pagesMetode Statement of Fabrication RebararifNo ratings yet
- Technical Reference Options and Adapters Volume 1 Apr84Document501 pagesTechnical Reference Options and Adapters Volume 1 Apr84kgrhoadsNo ratings yet
- Passat No. 13/1: Comfort System, With Alarm SystemDocument16 pagesPassat No. 13/1: Comfort System, With Alarm SystemLuix TiradoNo ratings yet
- Craftsman 73754 ManualDocument24 pagesCraftsman 73754 Manualjkchromy945No ratings yet
- Appendix. 505 Program Mode Worksheets: 505 Digital Governor Manual 85017V1Document3 pagesAppendix. 505 Program Mode Worksheets: 505 Digital Governor Manual 85017V1gonzalesNo ratings yet
- Classification Matter Flow ChartDocument1 pageClassification Matter Flow ChartKiera CeelyNo ratings yet
- PRO-II Thermodynamic Model SelectionDocument79 pagesPRO-II Thermodynamic Model Selectionchemsac2100% (1)
- Raymond Scott - Cindy ElectroniumDocument2 pagesRaymond Scott - Cindy ElectroniumJen HillNo ratings yet
- Rental Power 70 KW: Specification SheetDocument4 pagesRental Power 70 KW: Specification SheetDulguunkherlen BudkhandNo ratings yet
- Servomotor WedgeDocument24 pagesServomotor WedgeAlanNo ratings yet
- ETABS 19.0.0-Report ViewerDocument207 pagesETABS 19.0.0-Report ViewerDaniel Pesca SilvaNo ratings yet
- Engine Test CellDocument44 pagesEngine Test Cellgrhvg_mct8224No ratings yet
- Vray Material Settings: COMP 423: Cadd For ArchitectureDocument18 pagesVray Material Settings: COMP 423: Cadd For ArchitectureMarvin GonzalesNo ratings yet
- Tabl Navegacion Aqua SignalDocument4 pagesTabl Navegacion Aqua SignalNelson Aguirre BravoNo ratings yet
- Ormin ElementaryDocument19 pagesOrmin ElementaryPRC Board100% (1)
- LucasFilm Sound Effects Library - Track & Index ListDocument22 pagesLucasFilm Sound Effects Library - Track & Index ListKALFER0% (1)
- QC of Continuous Flight Auger PilesDocument1 pageQC of Continuous Flight Auger Pilesnischal_babuNo ratings yet
- Copeland Cr28k6 PFV Recip Compressor Technical Specifications2Document1 pageCopeland Cr28k6 PFV Recip Compressor Technical Specifications2PerezNo ratings yet
- Electrical ContactorDocument14 pagesElectrical ContactorRaphael212219No ratings yet
- CPP Exceptions Handling PDFDocument4 pagesCPP Exceptions Handling PDFRakib Uddin ChowdhuryNo ratings yet
- Notificatio N (Rese Rvation) Gove Rnment: A Cu) UTDocument1 pageNotificatio N (Rese Rvation) Gove Rnment: A Cu) UT122-Ayush Kumar ParganihaNo ratings yet
- Argus Dual System Pi enDocument2 pagesArgus Dual System Pi enfahmi1987No ratings yet
- Vibration Diagnosis and CorrectionDocument54 pagesVibration Diagnosis and Correctionbhanuka2009No ratings yet
- Amyuni PDF ConverterDocument22 pagesAmyuni PDF ConverterMikeyarnoldNo ratings yet
- Torre Sauter 0 - 5 - 320 - 025 - 4 PDFDocument27 pagesTorre Sauter 0 - 5 - 320 - 025 - 4 PDFGuiNo ratings yet
- Rashid Ch10 ImagesDocument47 pagesRashid Ch10 ImagesAtiq Ur RehmanNo ratings yet
- V33500 TVDocument2 pagesV33500 TVgoriath-fxNo ratings yet