You might also like
- 1Document25 pages1Anonymous xluOg30PNo ratings yet
- Top Universities That Students Graduated FromDocument10 pagesTop Universities That Students Graduated FromAnonymous xluOg30PNo ratings yet
- Chinmay Pandurang Patil: Personal InformationDocument4 pagesChinmay Pandurang Patil: Personal InformationAnonymous xluOg30PNo ratings yet
- 11 Me 504Document1 page11 Me 504Anonymous xluOg30PNo ratings yet
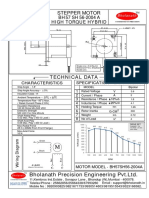
- BH57SH56 2004a 12.6KGCMDocument1 pageBH57SH56 2004a 12.6KGCMAnonymous xluOg30PNo ratings yet
- Chinmay Pandurang Patil: Personal InformationDocument4 pagesChinmay Pandurang Patil: Personal InformationAnonymous xluOg30PNo ratings yet
- Mechanical Refrigeration Cycles ExplainedDocument2 pagesMechanical Refrigeration Cycles ExplainedAnkur Yash100% (1)
- 11 Me 504Document1 page11 Me 504Anonymous xluOg30PNo ratings yet
- Examination Hall TicketDocument2 pagesExamination Hall TicketAnonymous xluOg30PNo ratings yet
- Fins Cicular A-1aDocument4 pagesFins Cicular A-1aAnonymous xluOg30PNo ratings yet
- Extracted Pages From TE Sevxcm V (CBGS)Document1 pageExtracted Pages From TE Sevxcm V (CBGS)Anonymous xluOg30PNo ratings yet
- Index: SR No Title Page No. 1 2 2 2 3 Design and Materials 2 4 Electrical and Electronic Connections 4Document1 pageIndex: SR No Title Page No. 1 2 2 2 3 Design and Materials 2 4 Electrical and Electronic Connections 4Anonymous xluOg30PNo ratings yet
- 7.4 Indicator DiagramDocument6 pages7.4 Indicator DiagramAnonymous xluOg30PNo ratings yet
- PlanetDocument1 pagePlanetAnonymous xluOg30PNo ratings yet
- Experiment No. 1 - Design of Vertical Toggle Clamp.: Karan V. Salgaonkar Ganesh Nichite Chinmay PatilDocument1 pageExperiment No. 1 - Design of Vertical Toggle Clamp.: Karan V. Salgaonkar Ganesh Nichite Chinmay PatilAnonymous xluOg30PNo ratings yet
- Invoice Oda6864958815317gsfjk00Document1 pageInvoice Oda6864958815317gsfjk00Anonymous xluOg30PNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Newton's Laws0Document74 pagesNewton's Laws0K.s. BalajiNo ratings yet
- DRIVING PRECAST CONCRETE PILES by Vibration PDFDocument18 pagesDRIVING PRECAST CONCRETE PILES by Vibration PDFRicusNo ratings yet
- PROBLEM SET HydraulicsDocument1 pagePROBLEM SET HydraulicsErika Rose LaronNo ratings yet
- Problem 4.63 - Fox - Mecânica Dos FluidosDocument1 pageProblem 4.63 - Fox - Mecânica Dos FluidosBruno AlbuquerqueNo ratings yet
- Ge Lube Oil Varnishing Til 1528-3Document8 pagesGe Lube Oil Varnishing Til 1528-3JJNo ratings yet
- Suspension Acoustics - Temkin S PDFDocument418 pagesSuspension Acoustics - Temkin S PDFDaniela VillegasNo ratings yet
- SSC JE Mechanical Syllabus BreakdownDocument4 pagesSSC JE Mechanical Syllabus BreakdownAbhishek DadhwalNo ratings yet
- Heat Conduction Equation: Heat and Mass Transfer: Fundamentals & ApplicationsDocument75 pagesHeat Conduction Equation: Heat and Mass Transfer: Fundamentals & Applicationssalim ekizNo ratings yet
- Catalysts: Computer Simulations of Photocatalytic ReactorsDocument15 pagesCatalysts: Computer Simulations of Photocatalytic ReactorsOmkar SomuNo ratings yet
- Lecture Notes - Metal Forming PDFDocument68 pagesLecture Notes - Metal Forming PDFIrfan KhanNo ratings yet
- Determination of Absolute Permeability of Core Sample by Using Liquid Phase FluidDocument14 pagesDetermination of Absolute Permeability of Core Sample by Using Liquid Phase FluidNurrahmisrNo ratings yet
- Pump Power Calculation - NeutriumDocument6 pagesPump Power Calculation - NeutriumGilbertNo ratings yet
- Impact Hammer Product DataDocument4 pagesImpact Hammer Product DatasadettinorhanNo ratings yet
- Elasticity & Plasticity Theory ExplainedDocument3 pagesElasticity & Plasticity Theory Explainedrameshbabu_1979No ratings yet
- PSCExample1ASeminar JLS Jul05Document10 pagesPSCExample1ASeminar JLS Jul05Ekky CecilNo ratings yet
- Correction Factors For ASME ANSI-OM3 Stress-Velocity RelationshipDocument8 pagesCorrection Factors For ASME ANSI-OM3 Stress-Velocity RelationshipMPhamNo ratings yet
- Design of Light Duty Engine Overhauling StandDocument83 pagesDesign of Light Duty Engine Overhauling StandAMIR MOHAMMED86% (7)
- Operating Manual Density Determination Set: Kern Aes-A01Document24 pagesOperating Manual Density Determination Set: Kern Aes-A01dexterpoliNo ratings yet
- O Level Physics Syllabus Only From 2023Document21 pagesO Level Physics Syllabus Only From 2023Md SafwatNo ratings yet
- Steel connection design check summaryDocument18 pagesSteel connection design check summaryDaniel TuerosNo ratings yet
- Mechanical Design of Transmission LinesDocument9 pagesMechanical Design of Transmission LinesPathum SudasingheNo ratings yet
- Control of Process Parameters in a PlantDocument30 pagesControl of Process Parameters in a Plantxylan017No ratings yet
- Principles of Foundation Design D.BDocument4 pagesPrinciples of Foundation Design D.BDavid BaltazaryNo ratings yet
- Evapotranspiration Measurement Methods: W. James Shuttleworth - SAHRA, University of ArizonaDocument4 pagesEvapotranspiration Measurement Methods: W. James Shuttleworth - SAHRA, University of ArizonaJoanna Marie NunagNo ratings yet
- Lake Shore Manual Appendix AlDocument18 pagesLake Shore Manual Appendix AlKazkekNo ratings yet
- ECSS E HB 31 01 - Part14A Cryogenic CoolingDocument545 pagesECSS E HB 31 01 - Part14A Cryogenic CoolingGuillermo MartínezNo ratings yet
- Chapter 16: The Unification of ForcesDocument17 pagesChapter 16: The Unification of ForcesJuazmantNo ratings yet
- This Study Resource Was: Transition CurvesDocument7 pagesThis Study Resource Was: Transition CurvesJoe NjoreNo ratings yet
- 9chem Ch1,2 PDFDocument4 pages9chem Ch1,2 PDFMohammad AshfaqNo ratings yet