You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Heavy Duty 2.5 Ton Long Frame Floor Jack Product ManualDocument3 pagesHeavy Duty 2.5 Ton Long Frame Floor Jack Product ManualChris Epler100% (2)
- Partech Solved Problems 15 ProblemsDocument14 pagesPartech Solved Problems 15 ProblemsCarlos Miguel Dacaimat0% (1)
- Artificial Intelligence Questions&Ans Uninformed SearchDocument5 pagesArtificial Intelligence Questions&Ans Uninformed Searchjaijohnk83% (6)
- Review Questions - Gas AbsorptionDocument1 pageReview Questions - Gas AbsorptionCarlos Miguel Dacaimat40% (5)
- Factors That Affect The Quality of CommunicationDocument9 pagesFactors That Affect The Quality of CommunicationWilliam Paras Inte100% (3)
- Appliance Watts Appliance Watts Appliance Watts: Kitchen Living Room ToolsDocument2 pagesAppliance Watts Appliance Watts Appliance Watts: Kitchen Living Room ToolsCarlos Miguel DacaimatNo ratings yet
- Anna'S Pinktastic Birthday Anna'S Pinktastic Birthday Anna'S Pinktastic BirthdayDocument1 pageAnna'S Pinktastic Birthday Anna'S Pinktastic Birthday Anna'S Pinktastic BirthdayCarlos Miguel DacaimatNo ratings yet
- CHE Problems - ChopeyDocument11 pagesCHE Problems - ChopeyCarlos Miguel DacaimatNo ratings yet
- DAY2 WORKSHEET5xDocument1 pageDAY2 WORKSHEET5xCarlos Miguel DacaimatNo ratings yet
- Development of Small Scale Wave Energy Converter Using Oscillating Water Column OWC With Power Management SystemDocument13 pagesDevelopment of Small Scale Wave Energy Converter Using Oscillating Water Column OWC With Power Management SystemCarlos Miguel DacaimatNo ratings yet
- Answers:: ST ND RD THDocument2 pagesAnswers:: ST ND RD THCarlos Miguel DacaimatNo ratings yet
- Load Upgrading in Phase IIDocument1 pageLoad Upgrading in Phase IICarlos Miguel DacaimatNo ratings yet
- Screw Feeder Description and ControlsDocument1 pageScrew Feeder Description and ControlsCarlos Miguel DacaimatNo ratings yet
- July 25Document1 pageJuly 25Carlos Miguel DacaimatNo ratings yet
- 1 BtuDocument3 pages1 BtuCarlos Miguel DacaimatNo ratings yet
- 1 BtuDocument3 pages1 BtuCarlos Miguel DacaimatNo ratings yet
- Application SoftwareDocument3 pagesApplication SoftwareCarlos Miguel DacaimatNo ratings yet
- Motor MaintenanceDocument17 pagesMotor MaintenanceCarlos Miguel Dacaimat100% (1)
- ReviewerDocument19 pagesReviewerCarlos Miguel Dacaimat100% (1)
- Polymer CharacterizationDocument29 pagesPolymer CharacterizationCarlos Miguel Dacaimat0% (1)
- 1 BTU 0.252 Kcal 15 X 10 0.252kcal 1 Btu 3.78 X 10Document3 pages1 BTU 0.252 Kcal 15 X 10 0.252kcal 1 Btu 3.78 X 10Carlos Miguel DacaimatNo ratings yet
- Significance of The Study - BiochemDocument3 pagesSignificance of The Study - BiochemCarlos Miguel DacaimatNo ratings yet
- Chapter 17 Product RecoveryDocument2 pagesChapter 17 Product RecoveryCarlos Miguel DacaimatNo ratings yet
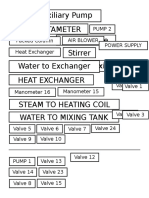
- Auxiliary Pump Rotameter Orifice Plate Stirrer Mixing Tank Water To Exchanger Heat Exchanger Steam To Heating Coil Water To Mixing TankDocument1 pageAuxiliary Pump Rotameter Orifice Plate Stirrer Mixing Tank Water To Exchanger Heat Exchanger Steam To Heating Coil Water To Mixing TankCarlos Miguel DacaimatNo ratings yet
- Catalyst Pellets 0Document1 pageCatalyst Pellets 0Carlos Miguel DacaimatNo ratings yet
- Components of Wastewater FlowDocument6 pagesComponents of Wastewater FlowCarlos Miguel DacaimatNo ratings yet
- Case Study 11 Centralia Underground Mine FireDocument11 pagesCase Study 11 Centralia Underground Mine Firemigire kennedyNo ratings yet
- Tutorial Questions and Answers - 2011Document10 pagesTutorial Questions and Answers - 2011Jan ScarNo ratings yet
- Catalogo Bulldog Jgo Empacaduras Maquinas+Motores Todo en UnoDocument78 pagesCatalogo Bulldog Jgo Empacaduras Maquinas+Motores Todo en UnoAlexis SanchezNo ratings yet
- 3500 91 Egd Communication Gateway Module Datasheet 0Document6 pages3500 91 Egd Communication Gateway Module Datasheet 0dikastaloneNo ratings yet
- Grid Synchronization of Power Converters Using Multiple Second Order Generalized IntegratorsDocument6 pagesGrid Synchronization of Power Converters Using Multiple Second Order Generalized IntegratorsJandfor Tansfg ErrottNo ratings yet
- WinDNC - V05 - 02 English PDFDocument2 pagesWinDNC - V05 - 02 English PDFAnonymous XXKCjKnc0No ratings yet
- Update Notifikasi Depkes FEB 18Document6 pagesUpdate Notifikasi Depkes FEB 18pratistanadia_912023No ratings yet
- LDT9965 Dis WasherDocument70 pagesLDT9965 Dis WasherJosé Airton TirakowskiNo ratings yet
- Citrix Xenserver ® 6.0.2 Emergency Network Reset: Published Wednesday, 29 February 2012 1.0 EditionDocument6 pagesCitrix Xenserver ® 6.0.2 Emergency Network Reset: Published Wednesday, 29 February 2012 1.0 EditionJuan CarlosNo ratings yet
- Mapplet InformaticaDocument3 pagesMapplet InformaticaRamesh Babu BabuNo ratings yet
- Nitrogen Purge Manifold For C2H2Document3 pagesNitrogen Purge Manifold For C2H2Abdullah FazilNo ratings yet
- D-Link DI-524 ManualDocument92 pagesD-Link DI-524 ManualhadzicinetNo ratings yet
- Arup Scheme Design GuideDocument139 pagesArup Scheme Design GuideDean TyrrellNo ratings yet
- Production ManagementDocument81 pagesProduction ManagementrrathoreNo ratings yet
- Data SheetDocument2 pagesData SheetAsalamEilujNo ratings yet
- Stelzer Catalog PDFDocument12 pagesStelzer Catalog PDFlhphong021191No ratings yet
- AragoniteDocument1 pageAragonitescaravelo7633No ratings yet
- XCMG Construction Machinery Co., LTDDocument4 pagesXCMG Construction Machinery Co., LTD余No ratings yet
- Mix Design Practice For Bituminous MixDocument49 pagesMix Design Practice For Bituminous MixAshwani KesharwaniNo ratings yet
- Home Automation Control System Using DTMFDocument25 pagesHome Automation Control System Using DTMFengaydiNo ratings yet
- NAEC Approved Continuing Education 2018marchDocument26 pagesNAEC Approved Continuing Education 2018marchRuano Andreola StumpfNo ratings yet
- ProjectDocument34 pagesProjectSarvajeet Kshirsagar100% (1)
- Standard Terms & Conditions of Sale Pre-Engineered BuildingsDocument18 pagesStandard Terms & Conditions of Sale Pre-Engineered BuildingsHongducBuiNo ratings yet
- Ehe 07Document286 pagesEhe 07api-348272721No ratings yet
- T.C. Electronic M3000 User ManualDocument78 pagesT.C. Electronic M3000 User ManualStanleyNo ratings yet
- EC8093 - Digital Image Processing (Ripped From Amazon Kindle Ebooks by Sai Seena) PDFDocument102 pagesEC8093 - Digital Image Processing (Ripped From Amazon Kindle Ebooks by Sai Seena) PDFSivaramakrishnan Kanagaraj0% (1)
- Da10 Air Cooled Engine (Appn Code D3.2007 & D3Document26 pagesDa10 Air Cooled Engine (Appn Code D3.2007 & D3Sandeep NikhilNo ratings yet