You might also like
- Arduino Como Osciloscopio Utilizando LabVIEW - GameloggerGameloggerDocument4 pagesArduino Como Osciloscopio Utilizando LabVIEW - GameloggerGameloggeraNo ratings yet
- IKER JIMENEZ - Enigmas Sin ResolverDocument183 pagesIKER JIMENEZ - Enigmas Sin Resolveredicioneshalbrane100% (1)
- Parcial 1 CompuDocument20 pagesParcial 1 CompuTobe Dc50% (2)
- English Matters, La Mejor Revista para Mejorar Tu Inglés - Inglés Por Tu Cuenta PDFDocument6 pagesEnglish Matters, La Mejor Revista para Mejorar Tu Inglés - Inglés Por Tu Cuenta PDFaNo ratings yet
- Reconocimiento Mundial - Cambridge EnglishDocument2 pagesReconocimiento Mundial - Cambridge EnglishaNo ratings yet
- Acredita Tu Nivel de Inglés Por Cambridge Con Inglés Total - Inglés Por Tu CuentDocument4 pagesAcredita Tu Nivel de Inglés Por Cambridge Con Inglés Total - Inglés Por Tu CuentaNo ratings yet
- Open English Junior: Curso Online de Inglés para NiñosDocument7 pagesOpen English Junior: Curso Online de Inglés para NiñosaNo ratings yet
- "Nos Conocemos Desde Hace Años." - DuolingoDocument1 page"Nos Conocemos Desde Hace Años." - DuolingoaNo ratings yet
- Ejercicios Pronombres Personales en Inglés Con RespuestasDocument2 pagesEjercicios Pronombres Personales en Inglés Con Respuestasa100% (1)
- El Cumpleaños Feliz en InglésDocument4 pagesEl Cumpleaños Feliz en InglésaNo ratings yet
- Lección de Inglés: Adverbs: Form and FunctionDocument3 pagesLección de Inglés: Adverbs: Form and FunctionaNo ratings yet
- Las Oraciones Relativas en Inglés PDFDocument4 pagesLas Oraciones Relativas en Inglés PDFaNo ratings yet
- Las Oraciones Relativas en InglésDocument4 pagesLas Oraciones Relativas en InglésaNo ratings yet
- "Ella Lo Cree." - DuolingoDocument6 pages"Ella Lo Cree." - DuolingoaNo ratings yet
- Programacion de Un Parqueo en GrafcetDocument12 pagesProgramacion de Un Parqueo en GrafcetaNo ratings yet
- Lección de Inglés: Already:Just:Still:YetDocument2 pagesLección de Inglés: Already:Just:Still:YetaNo ratings yet
- Lección de Inglés: Present Perfect vs. Past SimpleDocument2 pagesLección de Inglés: Present Perfect vs. Past SimpleaNo ratings yet
- Lección de Inglés: Personal PronounsDocument3 pagesLección de Inglés: Personal PronounsaNo ratings yet
- Expresión: Not My Cup of Tea (No de Mi Gusto) - INGLÉS NATURALMENTEDocument2 pagesExpresión: Not My Cup of Tea (No de Mi Gusto) - INGLÉS NATURALMENTEaNo ratings yet
- Diferencias Entre Too, Too Much Too Many (Demasiado:s)Document3 pagesDiferencias Entre Too, Too Much Too Many (Demasiado:s)a100% (1)
- Cómo Decir Surgir en INGLES - INGLÉS NATURALMENTEDocument3 pagesCómo Decir Surgir en INGLES - INGLÉS NATURALMENTEaNo ratings yet
- Lo Feo y Lo Monstruoso en La Serie Más Allá Del JardínDocument13 pagesLo Feo y Lo Monstruoso en La Serie Más Allá Del JardínKarla Aguilar100% (1)
- Libro Apicultura HoyDocument184 pagesLibro Apicultura HoySofía López OrtegaNo ratings yet
- Dinámica-Unidad 2-Actividades-406bDocument23 pagesDinámica-Unidad 2-Actividades-406bcristian lagunesNo ratings yet
- Cars Models Brochure KN2 NA May 2019 PDFDocument42 pagesCars Models Brochure KN2 NA May 2019 PDFCarlosgduss GarciaNo ratings yet
- Bienes para LaboratorioDocument3 pagesBienes para LaboratorioEl chespy y sus amigos.No ratings yet
- Origen de Los Elementos QuímicosDocument2 pagesOrigen de Los Elementos QuímicosFranciscoSantiagoNo ratings yet
- Tesina Jorge Baños PDFDocument264 pagesTesina Jorge Baños PDFpaulkohanNo ratings yet
- 1.5 - PPA Primera Etapa Ecosistema MarinoDocument7 pages1.5 - PPA Primera Etapa Ecosistema Marinojavier alexisNo ratings yet
- PAVAN DescripciónDocument4 pagesPAVAN DescripciónWein ImporterNo ratings yet
- Examen Parcial de Administración de OperacionesDocument2 pagesExamen Parcial de Administración de OperacionesNorma Melina Rodríguez JuárezNo ratings yet
- Alucinógenos y DrogasDocument12 pagesAlucinógenos y DrogasJ ZitO Esencia MusicalNo ratings yet
- Transiciones e Imbricaciones Estéticas en El Umbral Del Metro de Medellín. Jua Felipe Suescún PDFDocument165 pagesTransiciones e Imbricaciones Estéticas en El Umbral Del Metro de Medellín. Jua Felipe Suescún PDFRojo RestrepoNo ratings yet
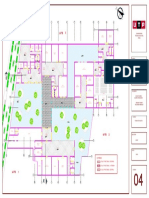
- PLano Flujos A ColorDocument1 pagePLano Flujos A ColorJeremy Dolores MéndezNo ratings yet
- SPA-1998-10-25-2 La Venida Del Senor Con Las nubes-SANCL-EDITADODocument52 pagesSPA-1998-10-25-2 La Venida Del Senor Con Las nubes-SANCL-EDITADOAlexandra Valencia100% (1)
- Abreviaturas ComunesDocument19 pagesAbreviaturas ComunesOrtiz Peña XavierNo ratings yet
- 1-1 Fundamentacion de ModaDocument30 pages1-1 Fundamentacion de Modaliliana arandaNo ratings yet
- Informe Practico de Fisica Marco OrellanaDocument4 pagesInforme Practico de Fisica Marco OrellanaMarco OrellanaNo ratings yet
- Netz 2Document6 pagesNetz 2Eliu martinezNo ratings yet
- Taller de Habilidades Sociales para Niños y AdolescentesDocument11 pagesTaller de Habilidades Sociales para Niños y Adolescentespemoso100% (1)
- Seguridad PasivaDocument69 pagesSeguridad PasivaJohn Fredy Martínez Cardona100% (1)
- S03.s2 Ley de GausDocument13 pagesS03.s2 Ley de GausSegundo Estela CubasNo ratings yet
- 'Reliability Centered Maintenance' ('RCM +') : Mantenimiento Centrado en La ConfiabilidadDocument10 pages'Reliability Centered Maintenance' ('RCM +') : Mantenimiento Centrado en La ConfiabilidadOswaldo Ramos SparrowNo ratings yet
- LumbagoDocument12 pagesLumbagoMacarena Vidal Illanes100% (1)
- INTERVENCIÓN BREVE para El Consumo de Riesgo y Perjudicial de AlcoholDocument52 pagesINTERVENCIÓN BREVE para El Consumo de Riesgo y Perjudicial de Alcoholpsic_molina-1No ratings yet
- Protocolo Neuronorma Ext IIDocument63 pagesProtocolo Neuronorma Ext IIgvilaregutNo ratings yet
- Tarea 2Document4 pagesTarea 2Lorena Zamudio100% (1)
- Flujo Gradualmente VariadoDocument12 pagesFlujo Gradualmente VariadoArias AlejandroNo ratings yet
- Entradas Calientes - Gaston AcurioDocument61 pagesEntradas Calientes - Gaston Acurioluza50No ratings yet