You might also like
- Devoir Corrigé de Contrôle N°2 - Génie Mécanique Emmeteur Terrestre (Support Orientable) - Bac Technique (2013-2014) MR Ben Abdallah Marouan PDFDocument15 pagesDevoir Corrigé de Contrôle N°2 - Génie Mécanique Emmeteur Terrestre (Support Orientable) - Bac Technique (2013-2014) MR Ben Abdallah Marouan PDFabdelbasset11No ratings yet
- Devoir de Synthèse N°1 - Technologie CHAINE D'EMBALLAGE DES FEUILLES DE PAPIER - Bac Technique (2012-2013) MR Hadjkacem AbdelkarimDocument11 pagesDevoir de Synthèse N°1 - Technologie CHAINE D'EMBALLAGE DES FEUILLES DE PAPIER - Bac Technique (2012-2013) MR Hadjkacem Abdelkarimيس المباركيNo ratings yet
- DevoirDocument3 pagesDevoirsoufiane8fkaNo ratings yet
- Devoir de Contrôle N°2 - Génie Mécanique - Machine À Pain - 3ème Technique (2016-2017) MR JEMAI LotfiDocument10 pagesDevoir de Contrôle N°2 - Génie Mécanique - Machine À Pain - 3ème Technique (2016-2017) MR JEMAI LotfiYoussef CherniNo ratings yet
- DS1 - DT - Cellule Flexible D'usinageDocument4 pagesDS1 - DT - Cellule Flexible D'usinageElafif Hamdi0% (1)
- DS1 3 11 12DPMécaDocument4 pagesDS1 3 11 12DPMécaBouabdellaoui saif ennasr100% (1)
- Invers 2020Document3 pagesInvers 2020Mortadha RabahNo ratings yet
- (Zone D'étude) : 1. Mise en Situ Ation 2. Présentation Du SystèmeDocument4 pages(Zone D'étude) : 1. Mise en Situ Ation 2. Présentation Du SystèmeMarouen MekkiNo ratings yet
- Devoir de Contrôle N°1 - Génie Mécanique DC Pompe D'alimentation - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineDocument6 pagesDevoir de Contrôle N°1 - Génie Mécanique DC Pompe D'alimentation - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineBen nasseur Mohamed aliNo ratings yet
- Corrige Technique Controle2018 PDFDocument31 pagesCorrige Technique Controle2018 PDFHamami AymenNo ratings yet
- 1ère Année Secondaire 0708 - Devoir de Synthése N°3Document5 pages1ère Année Secondaire 0708 - Devoir de Synthése N°3Kamel TayahiNo ratings yet
- dc2 3tech 2011 2012Document7 pagesdc2 3tech 2011 2012Bouabdellaoui saif ennasrNo ratings yet
- Devoir de Synthese N°2 1as Lycee Bir Lahmar Azzabi Moez-2020-2021 - 095211Document6 pagesDevoir de Synthese N°2 1as Lycee Bir Lahmar Azzabi Moez-2020-2021 - 095211Imed MoussaNo ratings yet
- Devoir de Synthèse N°1 2007 2008 (Région Kairouan)Document15 pagesDevoir de Synthèse N°1 2007 2008 (Région Kairouan)Piere Ebrahim50% (2)
- Devoir de Synthèse N°2 - Génie Mécanique - Systéme de Conditionnement de Savons - 3ème Technique (2016-2017) MR Mlaouhi Slaheddine PDFDocument8 pagesDevoir de Synthèse N°2 - Génie Mécanique - Systéme de Conditionnement de Savons - 3ème Technique (2016-2017) MR Mlaouhi Slaheddine PDFkhocineNo ratings yet
- Roues de FrictionDocument5 pagesRoues de FrictionBouabdellaoui saif ennasrNo ratings yet
- Devoir 3 Modele 5 Si 2 Bac SM B Semestre 1Document16 pagesDevoir 3 Modele 5 Si 2 Bac SM B Semestre 1lemsouguerNo ratings yet
- Devoir de Contrôle N°3 2009 2010 (Ibn Rachiq Ezzahra)Document10 pagesDevoir de Contrôle N°3 2009 2010 (Ibn Rachiq Ezzahra)Manu CocoNo ratings yet
- TD Boite de CommandeDocument2 pagesTD Boite de CommandeYoussef Trimech100% (1)
- DcN°3-1ère-hachoir-2020-2021 Un ÉlèveDocument4 pagesDcN°3-1ère-hachoir-2020-2021 Un ÉlèveAdam BensaidNo ratings yet
- Devoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Document5 pagesDevoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Piere EbrahimNo ratings yet
- Devoir de Synthese N3 - Technologie - 2eme Sciences (2007-2008) Mme Toumi Imen-Systeme de Chargement de Sable de MoulageDocument6 pagesDevoir de Synthese N3 - Technologie - 2eme Sciences (2007-2008) Mme Toumi Imen-Systeme de Chargement de Sable de MoulageKamel Bousnina100% (1)
- Devoir de Synthèse #2 - Génie Mécanique - Bac Technique (2013-2014) MR JEMAI Lotfi PDFDocument10 pagesDevoir de Synthèse #2 - Génie Mécanique - Bac Technique (2013-2014) MR JEMAI Lotfi PDFAmina NounaNo ratings yet
- DTDocument4 pagesDTmohamed1101No ratings yet
- Saber DC N1 1S3 2021 2022Document4 pagesSaber DC N1 1S3 2021 2022Adam BensaidNo ratings yet
- Griffe de TourDocument3 pagesGriffe de TourYahya Aidara100% (1)
- DS11 2017 - 2018Document8 pagesDS11 2017 - 2018Ridha Manaa100% (1)
- DS3 - 2015 - 2016 FinaleDocument9 pagesDS3 - 2015 - 2016 FinaleRidha ManaaNo ratings yet
- Devoir de Synthèse N°3 2010 2011 (Hazel T)Document9 pagesDevoir de Synthèse N°3 2010 2011 (Hazel T)Kereme JulienNo ratings yet
- TD Mat Gui 5.1 Tsi1 Tsi2Document5 pagesTD Mat Gui 5.1 Tsi1 Tsi2Adrien LupinNo ratings yet
- Parc A GrumesDocument3 pagesParc A Grumeslou louNo ratings yet
- S A D T D C: Ysteme Utomatique E RI E AissesDocument6 pagesS A D T D C: Ysteme Utomatique E RI E Aisseslou louNo ratings yet
- DT1 2020 Mechanical R2018Document7 pagesDT1 2020 Mechanical R2018Fethi BenmassoudeNo ratings yet
- Enoncé DS2 Mars 20191 - 1Document2 pagesEnoncé DS2 Mars 20191 - 1Fatma LaribiNo ratings yet
- Courroies Chaines PRDocument2 pagesCourroies Chaines PROTHMAN MCHACHTINo ratings yet
- 1A Devoir de Synthèse N°2 - TM 2014Document6 pages1A Devoir de Synthèse N°2 - TM 2014Kamel TayahiNo ratings yet
- t2 Con Elec2015 CadreuseDocument6 pagest2 Con Elec2015 CadreuseBen Hamda Fethi80% (5)
- Dossier Pedagogique ds1 Systeme Automatise de Marquage de BoitesDocument4 pagesDossier Pedagogique ds1 Systeme Automatise de Marquage de BoitesomatrNo ratings yet
- Machine de Debitage de CeinturesDocument14 pagesMachine de Debitage de CeinturesGuiliass100% (1)
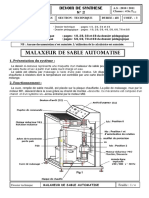
- Devoir de Synthèse N°2 - Technologie Dossier Technique MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI mEHREZDocument4 pagesDevoir de Synthèse N°2 - Technologie Dossier Technique MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI mEHREZsuiton fzNo ratings yet
- Devoir de Contrôle N°1 (DT) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de RobotDocument3 pagesDevoir de Contrôle N°1 (DT) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de Robotyassine zitouni100% (1)
- Devoir de Contrôle N°3 - Technologie Positionneur - 2ème Sciences (2009-2010) MR ChariagDocument2 pagesDevoir de Contrôle N°3 - Technologie Positionneur - 2ème Sciences (2009-2010) MR ChariagSameh RomdhaniNo ratings yet
- Epreuve Sujet Bac 2021 Construction Mecanique T1 1er Groupe 2021 SenegalDocument7 pagesEpreuve Sujet Bac 2021 Construction Mecanique T1 1er Groupe 2021 SenegalSaliouNo ratings yet
- Devoir de Synthèse N°1 2009 2010 (Ramzi Jellili)Document7 pagesDevoir de Synthèse N°1 2009 2010 (Ramzi Jellili)Youssef CherniNo ratings yet
- Devoir de Controle N°2: Systemede DecoupageDocument3 pagesDevoir de Controle N°2: Systemede DecoupageElafif HamdiNo ratings yet
- Statique Du SolideDocument4 pagesStatique Du SolideHal Sof100% (1)
- DCN°3 3ScT 16-17 DTDocument3 pagesDCN°3 3ScT 16-17 DTBouabdellaoui saif ennasr100% (1)
- Série D'exercices N°8 - Génie Mécanique - Dessin de Définition - Bac Technique (2019-2020) MR Ben Abdallah MarouanDocument1 pageSérie D'exercices N°8 - Génie Mécanique - Dessin de Définition - Bac Technique (2019-2020) MR Ben Abdallah MarouanSelma SenioritaNo ratings yet
- Devoir de Contrôle N°2 - Génie Mécanique - Mécanisme D'entrainement Du Plateau Tournant - Bac Technique (2017-2018) MR MR GHORBEL MamdouhDocument8 pagesDevoir de Contrôle N°2 - Génie Mécanique - Mécanisme D'entrainement Du Plateau Tournant - Bac Technique (2017-2018) MR MR GHORBEL MamdouhAmira JebaliNo ratings yet
- 07 Butee TrainardDocument5 pages07 Butee TrainardHkiri MohamedNo ratings yet
- TD Limiteur de CoupleDocument2 pagesTD Limiteur de CoupleHamami Aymen100% (2)
- Systeme de Percage Et de LamageDocument2 pagesSysteme de Percage Et de LamageWalid Fattoum100% (1)
- Devoir de Synthèse N°1 - Génie Électrique Four de Traitement - Bac Technique (2015-2016) MR Abdallah RaouafiDocument4 pagesDevoir de Synthèse N°1 - Génie Électrique Four de Traitement - Bac Technique (2015-2016) MR Abdallah RaouafiFethi BenmassoudeNo ratings yet
- Devoir 1 Modele 4 Si 2 Bac SM B Semestre 2Document11 pagesDevoir 1 Modele 4 Si 2 Bac SM B Semestre 2lemsouguer0% (1)
- dcn1 2020 3t2 Pince CorrectionDocument4 pagesdcn1 2020 3t2 Pince CorrectionGuiliassNo ratings yet
- Machine de Découpage de Carton: Devoir de Controle N°1 Prénom: Classe: 2Sc N°Document5 pagesMachine de Découpage de Carton: Devoir de Controle N°1 Prénom: Classe: 2Sc N°Adel KmimechNo ratings yet
- TD Palan Électrique À Chaine1Document4 pagesTD Palan Électrique À Chaine1xz4 zertoxNo ratings yet
- Dt-Unite de Production Du TSP PDFDocument5 pagesDt-Unite de Production Du TSP PDFGharbi Saifiddin100% (1)
- DS1 DT TSPDocument5 pagesDS1 DT TSPMouad MemniNo ratings yet
- Unité de Production DutspDocument6 pagesUnité de Production DutspNejib JallouliNo ratings yet
- Veille ConcurrentielleDocument4 pagesVeille ConcurrentielleLalita_31No ratings yet
- TP #2: Modélisation Power BI Et Langage DAXDocument1 pageTP #2: Modélisation Power BI Et Langage DAXhafida ait abedNo ratings yet
- 22 Guide Technique Risque Pour Les ReservoirsDocument17 pages22 Guide Technique Risque Pour Les Reservoirsvb_pol@yahooNo ratings yet
- Nokia Lumia 800 RM-801 Schematics v1Document30 pagesNokia Lumia 800 RM-801 Schematics v1Victor van HerptNo ratings yet
- Cours GRH S6Document43 pagesCours GRH S6Ect communityNo ratings yet
- Chapitre2 Cem 2015Document9 pagesChapitre2 Cem 2015Amine MaacheNo ratings yet
- Manuel D'utilisation de L'imprimante 3D Ender - Manuels+Document15 pagesManuel D'utilisation de L'imprimante 3D Ender - Manuels+Anonymous 9qKdViDP4100% (1)
- Produit 7855193 Prix Public HTDocument6 pagesProduit 7855193 Prix Public HTTAREK BERKANINo ratings yet
- 6-Corrig E42 - BTS ELT - Metro2014Document13 pages6-Corrig E42 - BTS ELT - Metro2014Charli petrusNo ratings yet
- Joint de Démontage DN350 Á DN2400 (PN16) Feuille de DonnéesDocument1 pageJoint de Démontage DN350 Á DN2400 (PN16) Feuille de Donnéesscribd scribdNo ratings yet
- Détection de Contour Par Un Ar. DroneDocument23 pagesDétection de Contour Par Un Ar. DroneAchraf elouerghi100% (1)
- 1-Sécurité Des Architectures Web - EtdDocument68 pages1-Sécurité Des Architectures Web - EtdSofiene Ben HlimaNo ratings yet
- Catalogue Bardahl 2018 NL FRDocument56 pagesCatalogue Bardahl 2018 NL FRikheir BardahlNo ratings yet
- Applications Duales Des Actionneurs Piezoelectriques AmplifiesDocument3 pagesApplications Duales Des Actionneurs Piezoelectriques AmplifiesadrarwalidNo ratings yet
- Schiller At-1 - User Manual Welch AllynDocument198 pagesSchiller At-1 - User Manual Welch AllynyadiraNo ratings yet
- TP JavascriptDocument3 pagesTP JavascriptMohamed DallagiNo ratings yet
- Newsletter Maroc Pam 5 PDFDocument4 pagesNewsletter Maroc Pam 5 PDFun_jour_de_printempsNo ratings yet
- Serie - 4 - CopieDocument2 pagesSerie - 4 - CopiedansokomahaNo ratings yet
- E03T003A HistoriqueDocument2 pagesE03T003A HistoriqueAlaaEddineBoukhrisNo ratings yet
- Rapport PFE - ConceptionEtDimensionnementD'UnHangarMétallique - Etude de 3 VariantesDocument162 pagesRapport PFE - ConceptionEtDimensionnementD'UnHangarMétallique - Etude de 3 Variantesuifnyfn100% (1)
- 36-App09-PERCEUSE SENSITIVEDocument2 pages36-App09-PERCEUSE SENSITIVENabil Ouled AhmedNo ratings yet
- Rapport Piratage InformatiqueDocument45 pagesRapport Piratage InformatiqueAllache Abderrahman100% (2)
- 5 Detection Et Anayse Des Evenements Optiques Dans Les Installations FTTH - Gerald RichardDocument26 pages5 Detection Et Anayse Des Evenements Optiques Dans Les Installations FTTH - Gerald RichardEngyEmy100% (1)
- La Nouvelle Communication Selon Yves WinkinDocument9 pagesLa Nouvelle Communication Selon Yves Winkinnosala88% (8)
- Comptabilité GénéraleDocument2 pagesComptabilité GénéraleRhazi Med SoulaimaneNo ratings yet
- Parrot Zikmu Solo (FR)Document4 pagesParrot Zikmu Solo (FR)Parrot_officialNo ratings yet
- Fiche de Formalisation-Variateur Alter Nat IfDocument1 pageFiche de Formalisation-Variateur Alter Nat IfBel AmiNo ratings yet
- 01 Cahier Des Charges Concours PI CFA 16juinDocument38 pages01 Cahier Des Charges Concours PI CFA 16juinfcoppoleNo ratings yet
- YesDocument106 pagesYesSeraphiel Con FuocoNo ratings yet
- 937 Em03032013Document20 pages937 Em03032013elmoudjahid_dzNo ratings yet