You might also like
- Network Theory EC201 NoteDocument70 pagesNetwork Theory EC201 NotevpzfarisNo ratings yet
- Lec3 Single StageDocument24 pagesLec3 Single Stagerajeevjain09No ratings yet
- EDC NotesDocument377 pagesEDC NotesRamaDinakaranNo ratings yet
- MNA StampDocument58 pagesMNA Stampellig1871638No ratings yet
- MIT Subthreshold OperationDocument29 pagesMIT Subthreshold Operationsanjeevsoni64No ratings yet
- Solutions To Homework 4: Problem 1 (15 Points)Document15 pagesSolutions To Homework 4: Problem 1 (15 Points)joa91189100% (1)
- Jacobians and Manipulator SingularitiesDocument35 pagesJacobians and Manipulator SingularitiessivaeeinfoNo ratings yet
- DSP Module 4 NotesDocument16 pagesDSP Module 4 NotesChetan Naik massand100% (1)
- Differential Voltage Current Conveyor (DVCC)Document81 pagesDifferential Voltage Current Conveyor (DVCC)raam0006100% (1)
- Project File of Gesture Controlled RobotDocument36 pagesProject File of Gesture Controlled RobotTeena Sharma92% (13)
- Chapter 10Document96 pagesChapter 10Asmaa MosbehNo ratings yet
- ELEC ENG 2EI5 Microelectronics Final ExamDocument4 pagesELEC ENG 2EI5 Microelectronics Final ExamFilip ZubacNo ratings yet
- Introduction To Cmos Vlsi Design: Silicon-on-Insulator (SOI)Document27 pagesIntroduction To Cmos Vlsi Design: Silicon-on-Insulator (SOI)TygerYashanshuNo ratings yet
- Lec12 ControlDocument19 pagesLec12 ControlbalkyderNo ratings yet
- IC6701 May 18 With KeyDocument14 pagesIC6701 May 18 With KeyAnonymous yO7rcec6vuNo ratings yet
- Jacobian: Dr. Shady A. MagedDocument44 pagesJacobian: Dr. Shady A. MagedpeterwalidNo ratings yet
- Ultra-Low Power VLSI CircuitDocument27 pagesUltra-Low Power VLSI CircuitRockstar_rohithNo ratings yet
- Single Stage AmplifiersDocument38 pagesSingle Stage AmplifiersSivakumar PothirajNo ratings yet
- Kramers Kronig en MatlabDocument25 pagesKramers Kronig en MatlabLetalis IraNo ratings yet
- Lec9 Velocity KinematicsDocument30 pagesLec9 Velocity KinematicsbalkyderNo ratings yet
- Z TransformDocument21 pagesZ Transformadil1122100% (3)
- 1.metal Semiconductor JunctionDocument29 pages1.metal Semiconductor JunctionJothibasu MarappanNo ratings yet
- Chebyshev Analog FilterDocument24 pagesChebyshev Analog FilternguyenphuonghuyNo ratings yet
- MosfetDocument15 pagesMosfetDr-Sanjeev KashyapNo ratings yet
- U18ec038 Vlsi Lab 3Document8 pagesU18ec038 Vlsi Lab 3Timir PatelNo ratings yet
- ULSI Technology Chapter01Document78 pagesULSI Technology Chapter01amit850133% (3)
- Switch Mode Power Conversion Fundamentals and Power Converters for PV SystemsDocument45 pagesSwitch Mode Power Conversion Fundamentals and Power Converters for PV SystemsRoberto Castillo MirandaNo ratings yet
- Electronic Devices Used in Power Electronics Characteristics ComparisonDocument12 pagesElectronic Devices Used in Power Electronics Characteristics ComparisonEysha qureshiNo ratings yet
- Logical Effort Designing Fast Cmos CircuitsDocument17 pagesLogical Effort Designing Fast Cmos CircuitsNishant MittalNo ratings yet
- Inverse Kinematics PPT (Pak Toni)Document14 pagesInverse Kinematics PPT (Pak Toni)herawanadifNo ratings yet
- CYT1000Document1 pageCYT1000Renato Hernandez50% (2)
- Modal Analysis of Step-Index FibersDocument25 pagesModal Analysis of Step-Index Fibersd24testNo ratings yet
- Ma 1151Document11 pagesMa 1151Ale X Cena50% (2)
- Mca 203Document234 pagesMca 203RajasekarNo ratings yet
- Introduction To Silvaco ATHENA Tool and Basic Concepts in Process Modeling 1Document18 pagesIntroduction To Silvaco ATHENA Tool and Basic Concepts in Process Modeling 1engahmed25No ratings yet
- Calculation PPT For EnergyDocument12 pagesCalculation PPT For EnergyMalyaj MishraNo ratings yet
- Newton Raphson MethodDocument24 pagesNewton Raphson MethodaminmominNo ratings yet
- A Good Lecture On QPSK TelecommunicationsDocument35 pagesA Good Lecture On QPSK Telecommunicationssid_senadheeraNo ratings yet
- 4-SCATTERING MATRIX-15-Jul-2019Material - I - 15-Jul-2019 - 7 - SparametersDocument12 pages4-SCATTERING MATRIX-15-Jul-2019Material - I - 15-Jul-2019 - 7 - Sparametersabhignan routhuNo ratings yet
- Flipflops: Technical Seminar ReportDocument16 pagesFlipflops: Technical Seminar ReportrachitNo ratings yet
- Signal Flow Graph - GATE Study Material in PDFDocument5 pagesSignal Flow Graph - GATE Study Material in PDFAalen IssacNo ratings yet
- LOGIC DESIGN SUBJECT (40Document2 pagesLOGIC DESIGN SUBJECT (40Matthew BattleNo ratings yet
- Variable Frequency Digital PWM Control For Low-Power Buck ConvertersDocument5 pagesVariable Frequency Digital PWM Control For Low-Power Buck Convertersantonytechno100% (1)
- Sequential Logic Flip Flops TimingDocument7 pagesSequential Logic Flip Flops TimingHarshal AmbatkarNo ratings yet
- Lec8 Inverse KinematicsDocument32 pagesLec8 Inverse KinematicsbalkyderNo ratings yet
- Orazem EIS Spring 2008Document306 pagesOrazem EIS Spring 2008Bangkit Rachmat HilcaNo ratings yet
- IQMath Fixed Vs Floating PDFDocument30 pagesIQMath Fixed Vs Floating PDFGautam KumarNo ratings yet
- Frequency MeterDocument5 pagesFrequency Meterlaithnatour0% (1)
- Lec 9 Dynamic Logic CircuitsDocument51 pagesLec 9 Dynamic Logic CircuitsBhavesh AsodariyaNo ratings yet
- 14.4 Bode Plots: Frequency Response 589Document12 pages14.4 Bode Plots: Frequency Response 589Luis Lizana100% (1)
- Mosfets 191024184553 PDFDocument87 pagesMosfets 191024184553 PDFksooryakrishna1No ratings yet
- Amec Unit 2 QBDocument23 pagesAmec Unit 2 QBashreen akbar aliNo ratings yet
- Mosfet 1Document33 pagesMosfet 1Palash SwarnakarNo ratings yet
- 23-3-20 - JFET and MOSFET (B25-27)Document45 pages23-3-20 - JFET and MOSFET (B25-27)Shubhankar KunduNo ratings yet
- VHDL Based Circuits Design and Synthesis On FPGA: A Dice Game Example For EducationDocument6 pagesVHDL Based Circuits Design and Synthesis On FPGA: A Dice Game Example For EducationRam RajaNo ratings yet
- PMOS, NMOS and CMOS Transmission Gate Characteristics.Document13 pagesPMOS, NMOS and CMOS Transmission Gate Characteristics.Prajwal KhairnarNo ratings yet
- Unit 2 - CMOS Logic, Fabrication and LayoutDocument34 pagesUnit 2 - CMOS Logic, Fabrication and LayoutphillipNo ratings yet
- Unit 3 - Week 0: Assignment 0Document4 pagesUnit 3 - Week 0: Assignment 0Akshay KumarNo ratings yet
- Recitation 11: Based On Nesterov, Yurii. Introductory Lectures On Convex Optimization: A Basic CourseDocument3 pagesRecitation 11: Based On Nesterov, Yurii. Introductory Lectures On Convex Optimization: A Basic CourseRashmi PhadnisNo ratings yet
- Recitation 11: Based On Nesterov, Yurii. Introductory Lectures On Convex Optimization: A Basic CourseDocument3 pagesRecitation 11: Based On Nesterov, Yurii. Introductory Lectures On Convex Optimization: A Basic CourseRashmi PhadnisNo ratings yet
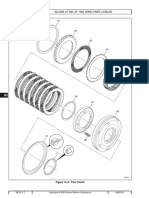
- Allison at 500, at 1500 Series Parts CatalogDocument3 pagesAllison at 500, at 1500 Series Parts Catalogamin chaabenNo ratings yet
- 48 Essential Life Skills Everyone Should Learn (S.a.)Document39 pages48 Essential Life Skills Everyone Should Learn (S.a.)Roman CooperNo ratings yet
- Openlectures Publicity PackDocument20 pagesOpenlectures Publicity PacksuhangdageekNo ratings yet
- Practice SetclozetestDocument48 pagesPractice SetclozetestLia TouskaNo ratings yet
- Cle Esp 9 Quarter 3Document15 pagesCle Esp 9 Quarter 3jonalyn obinaNo ratings yet
- IGCSE Syllabus Checklist - ICT (0417)Document15 pagesIGCSE Syllabus Checklist - ICT (0417)Melissa Li100% (1)
- Business Tax Reviewer UpdatedDocument36 pagesBusiness Tax Reviewer UpdatedCaptain ObviousNo ratings yet
- Chapter 03 - Coding in The SAPScript EditorDocument25 pagesChapter 03 - Coding in The SAPScript EditorLukas CelyNo ratings yet
- AWS ServicesDocument25 pagesAWS ServicesShaik Mahammad AlthafNo ratings yet
- SSM10 Application Server HelpDocument536 pagesSSM10 Application Server HelpNeil LirussoNo ratings yet
- CSC:361-Software Engineering: Semester: Fall2020Document39 pagesCSC:361-Software Engineering: Semester: Fall2020hamsfayyazNo ratings yet
- Illustrated Parts & Service Map - HP Compaq Dc7900 Convertible Minitower Business PCDocument4 pagesIllustrated Parts & Service Map - HP Compaq Dc7900 Convertible Minitower Business PCSaimir Astrit HydiNo ratings yet
- 083E Relative Humidity Sensor Accurate and ReliableDocument2 pages083E Relative Humidity Sensor Accurate and Reliablehuguer1No ratings yet
- Procedural Due Process - Refers To The Mode of Procedure Which GovernmentDocument13 pagesProcedural Due Process - Refers To The Mode of Procedure Which GovernmentCharlene M. GalenzogaNo ratings yet
- User Manual FADALDocument583 pagesUser Manual FADALAntonio GonçalvesNo ratings yet
- Total Preventative Maintenance Program InitiationDocument20 pagesTotal Preventative Maintenance Program InitiationAji Beni LastomoNo ratings yet
- Uy Vs Gonzales DigestDocument2 pagesUy Vs Gonzales DigestFrancis De CastroNo ratings yet
- Gemstone MineralsDocument8 pagesGemstone MineralsRina Shane PascuaNo ratings yet
- Factors Affecting Cultural Foods PlanningDocument8 pagesFactors Affecting Cultural Foods PlanningRegie Atienza50% (4)
- (Doc24.vn) De-Thi-Vao-10-Mon-Tieng-Anh-Thpt-Chuyen-Tp-Ho-Chinh-Minh-Nam-2014-2015-Co-Loi-GiaiDocument20 pages(Doc24.vn) De-Thi-Vao-10-Mon-Tieng-Anh-Thpt-Chuyen-Tp-Ho-Chinh-Minh-Nam-2014-2015-Co-Loi-GiaiThao AnhNo ratings yet
- Grove GMK6350Document20 pagesGrove GMK6350cornel_lupuNo ratings yet
- CMBS World - Reremic PhenomenonDocument14 pagesCMBS World - Reremic PhenomenonykkwonNo ratings yet
- Gildan - Asia - 2019 Catalogue - English - LR PDFDocument21 pagesGildan - Asia - 2019 Catalogue - English - LR PDFKoet Ji CesNo ratings yet
- Jurnal Harga Vskepuasan Pelanggan Vs Loyalitas PelangganDocument13 pagesJurnal Harga Vskepuasan Pelanggan Vs Loyalitas PelangganSyahrin AsmanNo ratings yet
- Eco System and Green Logistics BasicsDocument32 pagesEco System and Green Logistics BasicsBudmed GanbaatarNo ratings yet
- DMMEasyControl Software Guide - V1.4.3 (20211110)Document15 pagesDMMEasyControl Software Guide - V1.4.3 (20211110)Bruno FroesNo ratings yet
- STM Turbine Overspeed Failure Investigation-1Document11 pagesSTM Turbine Overspeed Failure Investigation-1Abdulrahman AlkhowaiterNo ratings yet
- Probationary DigestsDocument22 pagesProbationary DigestsMatt ManlapidNo ratings yet
- Electricity Markets and Renewable GenerationDocument326 pagesElectricity Markets and Renewable GenerationElimar RojasNo ratings yet
- Five Model Intragroup Conflict ManagemantDocument22 pagesFive Model Intragroup Conflict ManagemantmarsNo ratings yet