You might also like
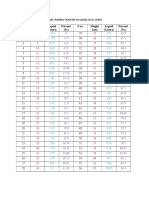
- S No. Height (CM) Liquid (Liters) Percent (%) S No. Height (CM) Liquid (Liters) Percent (%)Document2 pagesS No. Height (CM) Liquid (Liters) Percent (%) S No. Height (CM) Liquid (Liters) Percent (%)FayazKhanPathanNo ratings yet
- Fetel EEG RecordingsDocument51 pagesFetel EEG RecordingsFayazKhanPathanNo ratings yet
- USB Interfacing and Real Time Data Plotting With MATLABDocument9 pagesUSB Interfacing and Real Time Data Plotting With MATLABthietdaucongNo ratings yet
- Angle Between SubspacesDocument7 pagesAngle Between SubspacesFayazKhanPathanNo ratings yet
- Example Expressing Vector Fields With Coordinate SystemsDocument8 pagesExample Expressing Vector Fields With Coordinate SystemsCharles RitterNo ratings yet
- Funny StoriesDocument21 pagesFunny StoriesPablo Esteban AedoNo ratings yet
- Writing An Abstract Update 051112Document2 pagesWriting An Abstract Update 051112Don ArthurNo ratings yet
- Linear Integrated Circuit 2nd Edition - D. Roy Choudhary PDFDocument440 pagesLinear Integrated Circuit 2nd Edition - D. Roy Choudhary PDFGuna ShekarNo ratings yet
- EEG-fMRI Fusion - Kalman Filter - Inverse ProblemDocument28 pagesEEG-fMRI Fusion - Kalman Filter - Inverse ProblemFayazKhanPathanNo ratings yet
- Elements of Style For Writing Scientific Journal ArticlesDocument12 pagesElements of Style For Writing Scientific Journal ArticlesShaukat MazariNo ratings yet
- Emily Dickinson To Susan GilbertDocument1 pageEmily Dickinson To Susan GilbertFayazKhanPathanNo ratings yet
- The 44 Phonemes of English Chart PDFDocument4 pagesThe 44 Phonemes of English Chart PDFArun Prasath100% (2)
- Maxfilter User GuideDocument88 pagesMaxfilter User GuideFayazKhanPathanNo ratings yet
- Fetel EEG RecordingsDocument51 pagesFetel EEG RecordingsFayazKhanPathanNo ratings yet
- Book EnglishphoneticsDocument94 pagesBook EnglishphoneticsmanishNo ratings yet
- Shar Quie 2002Document4 pagesShar Quie 2002FayazKhanPathanNo ratings yet
- EDC Hand Written Theory Notes of ACE PDFDocument190 pagesEDC Hand Written Theory Notes of ACE PDFAmanda OwensNo ratings yet
- CHEP in Normal SubjectsDocument8 pagesCHEP in Normal SubjectsFayazKhanPathanNo ratings yet
- Clinical Usefulness of Laser Evoke 2003 Neurophysiologie Clinique Clinical NDocument12 pagesClinical Usefulness of Laser Evoke 2003 Neurophysiologie Clinique Clinical NFayazKhanPathanNo ratings yet
- Thesis TroemanDocument144 pagesThesis TroemanFayazKhanPathanNo ratings yet
- CHEP As A Valid Means To Study Nociceptive Pathways in Human SubjectsDocument4 pagesCHEP As A Valid Means To Study Nociceptive Pathways in Human SubjectsFayazKhanPathanNo ratings yet
- CHEP Hospitol ProcedureDocument2 pagesCHEP Hospitol ProcedureFayazKhanPathanNo ratings yet
- Gardner ThesisDocument128 pagesGardner ThesisFayazKhanPathanNo ratings yet
- Pid Tuning Rules For Second Order SystemsDocument6 pagesPid Tuning Rules For Second Order SystemsFayazKhanPathanNo ratings yet
- Ecg 3Document10 pagesEcg 3Khalid KhassawnehNo ratings yet
- Idioms and Phrases Capsule PDFDocument11 pagesIdioms and Phrases Capsule PDFFayazKhanPathanNo ratings yet
- PDF of 190 Vocabulary WordsDocument6 pagesPDF of 190 Vocabulary WordsRAGHUBALAN DURAIRAJUNo ratings yet
- Discrete PID Controller: For Use in Robotics Project #3Document10 pagesDiscrete PID Controller: For Use in Robotics Project #3FayazKhanPathanNo ratings yet
- What Are NeurotransmittersDocument1 pageWhat Are NeurotransmittersFayazKhanPathanNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)