You might also like
- Projectile Motion PDFDocument19 pagesProjectile Motion PDFRamesh BadamNo ratings yet
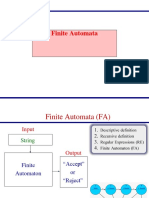
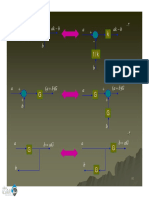
- Lec05 FiniteAutomataDocument59 pagesLec05 FiniteAutomataSaqlain UmerNo ratings yet
- Category TheoryDocument2 pagesCategory Theoryzq7gt58r9jNo ratings yet
- Lines and AnglesDocument7 pagesLines and AnglesmuralleNo ratings yet
- Chapter III The Right Triangle 1Document23 pagesChapter III The Right Triangle 1RonjayNo ratings yet
- Plane Geometry: Ellipse Rectangle CircleDocument1 pagePlane Geometry: Ellipse Rectangle Circlekrishna_pipingNo ratings yet
- Aqa 8300H FS Ins 2024Document2 pagesAqa 8300H FS Ins 2024evermath123No ratings yet
- Elementary Topos and Set TheoryDocument11 pagesElementary Topos and Set TheoryShining ZangNo ratings yet
- Module3 Worksheet TrigDocument9 pagesModule3 Worksheet TrigjyotibabaniNo ratings yet
- Sine Formula and Cosine Formula Pages 15 - 17, 19 - 23Document8 pagesSine Formula and Cosine Formula Pages 15 - 17, 19 - 23docphyicssvenkatk737No ratings yet
- Solutions To The 2005 CMO: SolutionDocument9 pagesSolutions To The 2005 CMO: Solutionshitaldr767No ratings yet
- Triangles With Special Isotomic Conjugate PairsDocument8 pagesTriangles With Special Isotomic Conjugate PairsĐoàn Duy TùngNo ratings yet
- Thomas Calculus Early Transcendentals Fifteenth Edition Joel Hass All ChapterDocument67 pagesThomas Calculus Early Transcendentals Fifteenth Edition Joel Hass All Chapterramona.evans546100% (6)
- Kocik Solecki Disentangling - A - Triangle Dualidad Analogía PDFDocument10 pagesKocik Solecki Disentangling - A - Triangle Dualidad Analogía PDFMario DalcínNo ratings yet
- Cosine and Sine Rule ProofsDocument4 pagesCosine and Sine Rule Proofsaaryamann guptaNo ratings yet
- Chapter 1 Preliminary Notions Chapitre 1 Notions PreliminairesDocument9 pagesChapter 1 Preliminary Notions Chapitre 1 Notions Preliminairescrbyounes123No ratings yet
- CH 11Document29 pagesCH 11luismasantos991No ratings yet
- Geometry Formulas All Gathered On One Easy Cheat SheetDocument1 pageGeometry Formulas All Gathered On One Easy Cheat Sheetnatashkan100% (2)
- Automatic-Control (WWW Sarayedaneshjo Com) 0005Document20 pagesAutomatic-Control (WWW Sarayedaneshjo Com) 0005Anon YmousNo ratings yet
- Week 016 Sum and Difference IdentitiesDocument8 pagesWeek 016 Sum and Difference IdentitiesCarsten HerreraNo ratings yet
- Higher Tier Formulae Sheet For June and November 2022Document2 pagesHigher Tier Formulae Sheet For June and November 2022iainrobertson6No ratings yet
- Quarter 2 Lesson 5 Week 10 11Document21 pagesQuarter 2 Lesson 5 Week 10 11Angelo ResuelloNo ratings yet
- M M M KGF KGF M: (1a Pregunta - 1er Parcial SEM 1/2013)Document2 pagesM M M KGF KGF M: (1a Pregunta - 1er Parcial SEM 1/2013)Gustavo Quispe AbascalNo ratings yet
- Worksheet15 SolutionsDocument6 pagesWorksheet15 SolutionsEmily LiuNo ratings yet
- Colimits and Homological AlgebraDocument9 pagesColimits and Homological AlgebraEpic WinNo ratings yet
- (CS5043) Part 2Document25 pages(CS5043) Part 2Ahtsham GhaffarNo ratings yet
- Bead On RingDocument2 pagesBead On RingYash TandonNo ratings yet
- Math 239 Assignment 6: H F G H I ADocument1 pageMath 239 Assignment 6: H F G H I Aluubyo6404No ratings yet
- Mathematical ToolsDocument80 pagesMathematical ToolsVarshiniNo ratings yet
- Landslide Repair Design Based On 2018 IBC & AASHTO 17thDocument7 pagesLandslide Repair Design Based On 2018 IBC & AASHTO 17thChowdhury PriodeepNo ratings yet
- 17 NP Complete Problems 2 ReductionsDocument122 pages17 NP Complete Problems 2 Reductionsquangnhat1220No ratings yet
- LatticeDocument24 pagesLatticeC NinjasNo ratings yet
- lect03-Finite Automata تمDocument24 pageslect03-Finite Automata تمMohamed EbrahemNo ratings yet
- P3 RevisionDocument93 pagesP3 Revisionapple liew ler xinNo ratings yet
- Lower PairsDocument20 pagesLower PairssonirocksNo ratings yet
- Solution: Jose P Erez CanoDocument2 pagesSolution: Jose P Erez CanoJose Perez PerezNo ratings yet
- Trigonometry RevisionDocument4 pagesTrigonometry RevisionKin Wai CheahNo ratings yet
- Law of Sines and CosinesDocument21 pagesLaw of Sines and CosinesAnthony CaputolNo ratings yet
- 119TRIG Notes 7Document7 pages119TRIG Notes 7flintyNo ratings yet
- Solid GeometryDocument1 pageSolid GeometrysewcinNo ratings yet
- Ch5 Trigonometry (II) QDocument9 pagesCh5 Trigonometry (II) Qman chit suenNo ratings yet
- الملاحق 0Document17 pagesالملاحق 0Hocine Gherbi FaycelNo ratings yet
- "Áreas e Volumes de Sólidos Geométricos": Cubo ParalelepípedoDocument1 page"Áreas e Volumes de Sólidos Geométricos": Cubo ParalelepípedoBruno SilvaNo ratings yet
- .Trashed 1667147460 Choosing The Correct Trig RuleDocument1 page.Trashed 1667147460 Choosing The Correct Trig RuleMarinela StefanNo ratings yet
- Trigonometry - Sine Rule and Cosine RuleDocument4 pagesTrigonometry - Sine Rule and Cosine Rulefaomah9No ratings yet
- 1 s2.0 S0893965909003577 MainDocument6 pages1 s2.0 S0893965909003577 MainFustei BogdanNo ratings yet
- Trig Formulae: Addition Formulae: Double AngleDocument1 pageTrig Formulae: Addition Formulae: Double AngleMaryNo ratings yet
- General Mathematics Reviewer IDocument1 pageGeneral Mathematics Reviewer IAngel HagsNo ratings yet
- Math12-1 - Lesson 4 - Solutions of Oblique TrianglesDocument18 pagesMath12-1 - Lesson 4 - Solutions of Oblique TrianglesKobe MartinezNo ratings yet
- Trig Sec 8Document4 pagesTrig Sec 8JSPAMoreNo ratings yet
- General Theory of Algebras Don PigozziDocument95 pagesGeneral Theory of Algebras Don PigozziOtra CuentaNo ratings yet
- Log TablesDocument5 pagesLog TablesMark ConnollyNo ratings yet
- Advanced Relational Database Design: Appendix CDocument11 pagesAdvanced Relational Database Design: Appendix CRocky SinghNo ratings yet
- HW 9Document2 pagesHW 9sreenath KBNo ratings yet
- SECTION 2 Binary OperationsDocument8 pagesSECTION 2 Binary OperationsMELEE MARCONo ratings yet
- Derive and Identify The Law of SinesDocument2 pagesDerive and Identify The Law of SinesPaper CutNo ratings yet
- Mathematical Analysis 1: theory and solved exercisesFrom EverandMathematical Analysis 1: theory and solved exercisesRating: 5 out of 5 stars5/5 (1)
- Productivity Now: Social Administration, Training, Economics and Production DivisionFrom EverandProductivity Now: Social Administration, Training, Economics and Production DivisionNo ratings yet
- Cohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)From EverandCohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)No ratings yet
- Chemistry Ncert NotesDocument35 pagesChemistry Ncert Notesvandana dehankarNo ratings yet
- Practice Test Paper-2 - IJSODocument11 pagesPractice Test Paper-2 - IJSOSonal Gupta100% (5)
- Powder MetallurgyDocument33 pagesPowder MetallurgyMohanakumara K CNo ratings yet
- Sample Paper 3Document5 pagesSample Paper 3AKSHAT VISHNOINo ratings yet
- Diprotic Acid Titration Calculation Worked Example Sulphuric Acid and Sodium Hydroxide - mp4Document2 pagesDiprotic Acid Titration Calculation Worked Example Sulphuric Acid and Sodium Hydroxide - mp4tobiloba temiNo ratings yet
- Sedimentation Settling Velocity Column AnalysisDocument11 pagesSedimentation Settling Velocity Column Analysiss_murugan0250% (2)
- Scan 9 Apr 2019 PDFDocument26 pagesScan 9 Apr 2019 PDFShivam BiswasNo ratings yet
- Experiment 4 Rotational DynamicsDocument2 pagesExperiment 4 Rotational DynamicsDave FortuNo ratings yet
- Thermal Conductivity Theory Properties Applications Physics of Solids N LiquidDocument306 pagesThermal Conductivity Theory Properties Applications Physics of Solids N LiquidTan KIm HAn100% (1)
- Exercise 1 2 MergeDocument30 pagesExercise 1 2 MergesmpopadeNo ratings yet
- Prediction and Improvement of Steady-State Performance of A Power Controlled Axial Piston PumpDocument10 pagesPrediction and Improvement of Steady-State Performance of A Power Controlled Axial Piston PumpmadmetroidNo ratings yet
- 1st Periodical Test - Gen - Physics 2Document1 page1st Periodical Test - Gen - Physics 2Leah Mae FranceNo ratings yet
- CHEG 320 - Electrode Kinetics - Extended NotesDocument13 pagesCHEG 320 - Electrode Kinetics - Extended NotesAzzkikrasdfNo ratings yet
- A Simple Theory of The Invar Effect in Iron-Nickel AlloysDocument16 pagesA Simple Theory of The Invar Effect in Iron-Nickel AlloysArley HenriqueNo ratings yet
- CH 3Document3 pagesCH 3Mohamed Abd El-MoniemNo ratings yet
- Chapter 3 - Rate Laws and StoichiometryDocument32 pagesChapter 3 - Rate Laws and StoichiometryKai Faha LukumNo ratings yet
- Supercritical Fluid Supercritical Fluid Extraction (Sfe) Supercritical Fluid Chromatography (SFC)Document67 pagesSupercritical Fluid Supercritical Fluid Extraction (Sfe) Supercritical Fluid Chromatography (SFC)Hoang ThinhNo ratings yet
- Dynamics11lecture PDFDocument89 pagesDynamics11lecture PDFEngra FithreeaNo ratings yet
- Module On Electric Circuits and Electrical Power AY 2014-2015Document6 pagesModule On Electric Circuits and Electrical Power AY 2014-2015Joni M. AlbaricoNo ratings yet
- Chemistry of Transition MetalsDocument56 pagesChemistry of Transition MetalsHamad Mohamad100% (1)
- Ultrasonic Plastic WeldingDocument22 pagesUltrasonic Plastic Weldingdipal8404No ratings yet
- Materials 15 05227 v2Document19 pagesMaterials 15 05227 v2Nassereddine YassineNo ratings yet
- Solved Problems in PhysicsDocument22 pagesSolved Problems in Physicsvasudevan m.vNo ratings yet
- Spur Gears Component GeneratorDocument5 pagesSpur Gears Component Generatormisapera35No ratings yet
- MTD 12 3Document2 pagesMTD 12 3arifi_civilNo ratings yet
- Universe PresentationDocument22 pagesUniverse Presentationbhavin100% (1)
- 7Document11 pages7John RivasNo ratings yet
- Speed of Light Sample Problems: PROBLEM: Find The Frequency of An EM Wave With A Wavelength of 485.2 Nm. SolutionDocument1 pageSpeed of Light Sample Problems: PROBLEM: Find The Frequency of An EM Wave With A Wavelength of 485.2 Nm. SolutionRenz Benhar Ocon BobadillaNo ratings yet
- P H y S I C S Part - I Multiple Correct Answer(s) TypeDocument28 pagesP H y S I C S Part - I Multiple Correct Answer(s) TypeUdayNo ratings yet