You might also like
- Package Cramer': R Topics DocumentedDocument5 pagesPackage Cramer': R Topics DocumentedMilkha SinghNo ratings yet
- Fsolve - Optimization ToolboxDocument6 pagesFsolve - Optimization ToolboxSmida ChahinezNo ratings yet
- October 22, 2022: Numpy Scipy - Optimize - Future - Scipy - Optimize Scipy - Optimize.optimize NumpyDocument9 pagesOctober 22, 2022: Numpy Scipy - Optimize - Future - Scipy - Optimize Scipy - Optimize.optimize NumpyadalinaNo ratings yet
- Fsolve 1Document16 pagesFsolve 1mrloadmovieNo ratings yet
- Help - Fsolve - MATLABDocument12 pagesHelp - Fsolve - MATLABGanderNo ratings yet
- XCS 355 Design and Analysis of Viva)Document43 pagesXCS 355 Design and Analysis of Viva)koteswarararaoNo ratings yet
- Symbolic AI MDP DPDocument6 pagesSymbolic AI MDP DPSeyidaliNo ratings yet
- CS-DAA Two Marks QuestionDocument12 pagesCS-DAA Two Marks QuestionPankaj SainiNo ratings yet
- TMA4215 - Semester Project Report OptimizationDocument5 pagesTMA4215 - Semester Project Report OptimizationEvacuolNo ratings yet
- Expt 5Document20 pagesExpt 5Amisha SharmaNo ratings yet
- A Quantum Approximate Optimization AlgorithmDocument16 pagesA Quantum Approximate Optimization AlgorithmBenjamin FranklinNo ratings yet
- MATLAB and LABView - Chapter 5Document24 pagesMATLAB and LABView - Chapter 5vinh quocNo ratings yet
- DAA Assignment 1Document7 pagesDAA Assignment 1MIKHAIEL gamingNo ratings yet
- Practical Lesson 4 Constrained OptimizationDocument6 pagesPractical Lesson 4 Constrained OptimizationIvan AlexandrovNo ratings yet
- Back-Propagation Is Very Simple. Who Made It ComplicatedDocument26 pagesBack-Propagation Is Very Simple. Who Made It ComplicatedEleodor Paul CirlugeaNo ratings yet
- Neural Network Forward and BackpropagationDocument11 pagesNeural Network Forward and BackpropagationAstryiah FaineNo ratings yet
- Exercises of Design & AnalysisDocument6 pagesExercises of Design & AnalysisKhang NguyễnNo ratings yet
- 16.323 Optimal Control Problems Set 1Document3 pages16.323 Optimal Control Problems Set 1Gene PerezNo ratings yet
- Design and Analysis of Algorithm QuestionsDocument12 pagesDesign and Analysis of Algorithm QuestionskoteswararaopittalaNo ratings yet
- Mechanical Vibration Lab ReportDocument7 pagesMechanical Vibration Lab ReportChris NichollsNo ratings yet
- Design and Analysis of Algorithm Question BankDocument15 pagesDesign and Analysis of Algorithm Question BankGeo ThaliathNo ratings yet
- CS 224n Assignment #3: Dependency Parsing: 1. Machine Learning & Neural Networks (8 Points)Document7 pagesCS 224n Assignment #3: Dependency Parsing: 1. Machine Learning & Neural Networks (8 Points)progisNo ratings yet
- # ELG 5255 Applied Machine Learning Fall 2020 # Assignment 3 (Multivariate Method)Document8 pages# ELG 5255 Applied Machine Learning Fall 2020 # Assignment 3 (Multivariate Method)raosahebNo ratings yet
- Artificial Intelligence Document Outline and QuestionsDocument11 pagesArtificial Intelligence Document Outline and QuestionsRohan GhadgeNo ratings yet
- Lab NN KNN SVMDocument13 pagesLab NN KNN SVMmaaian.iancuNo ratings yet
- Bic PsoDocument29 pagesBic PsodrenridaNo ratings yet
- Particle Swarm OptimisationDocument29 pagesParticle Swarm OptimisationsanyaNo ratings yet
- IN5400 - Machine Learning For Image AnalysisDocument6 pagesIN5400 - Machine Learning For Image AnalysisJohanne SaxegaardNo ratings yet
- Activation Function: Presented byDocument19 pagesActivation Function: Presented byShanmuganathan V (RC2113003011029)No ratings yet
- CS407 Neural Computation: Mexican HatDocument62 pagesCS407 Neural Computation: Mexican HatIlham YacineNo ratings yet
- Matlab CodeDocument8 pagesMatlab Codesmit thummarNo ratings yet
- Nnn3neural NetworksDocument5 pagesNnn3neural Networkskumar219No ratings yet
- Introduction To AI and ML: PLA Perceptron Learning AlgorithmDocument14 pagesIntroduction To AI and ML: PLA Perceptron Learning AlgorithmSrijith Reddy PakalaNo ratings yet
- 3 2MLP Extra NotesDocument27 pages3 2MLP Extra Notesyoussef hossamNo ratings yet
- Wa0009.Document27 pagesWa0009.Seetha LaxmiNo ratings yet
- Prim's Algorithm For A Growing MSTDocument9 pagesPrim's Algorithm For A Growing MSTErno LedderNo ratings yet
- Algorithm PDFDocument54 pagesAlgorithm PDFPrakash SinghNo ratings yet
- K MeansDocument329 pagesK Meansyousef shaban100% (1)
- Common Problem: ArrayDocument31 pagesCommon Problem: ArrayDannapurna DNo ratings yet
- Backward Forward PropogationDocument19 pagesBackward Forward PropogationConrad WaluddeNo ratings yet
- Metropolis HastingsDocument9 pagesMetropolis HastingsMingyu LiuNo ratings yet
- MC OpenmpDocument10 pagesMC OpenmpBui Khoa Nguyen DangNo ratings yet
- Chapter 2 Basic Features: 2.1 Simple MathDocument10 pagesChapter 2 Basic Features: 2.1 Simple MathSameer ShaikhNo ratings yet
- instructor-solution-manual-to-neural-networks-and-deep-learning-a-textbook-solutions-3319944622-9783319944623_compressDocument40 pagesinstructor-solution-manual-to-neural-networks-and-deep-learning-a-textbook-solutions-3319944622-9783319944623_compressHassam HafeezNo ratings yet
- Mathematical Analysis of Nonrecursive AlgorithmsDocument13 pagesMathematical Analysis of Nonrecursive AlgorithmsSindhusaranya PrakashNo ratings yet
- Instructor's Solution Manual For Neural NetworksDocument40 pagesInstructor's Solution Manual For Neural NetworksshenalNo ratings yet
- Exercises of Design & AnalysisDocument7 pagesExercises of Design & AnalysisAndyTrinh100% (1)
- MATLAB ® - The Language of Technical ComputingDocument26 pagesMATLAB ® - The Language of Technical Computingsharif114No ratings yet
- Programming Exercise 2: Logistic Regression: Machine LearningDocument13 pagesProgramming Exercise 2: Logistic Regression: Machine LearningzonadosNo ratings yet
- ML Andrew NGDocument13 pagesML Andrew NGGuru PrasadNo ratings yet
- Brain-Machine Interfaces: Matlab ExercisesDocument2 pagesBrain-Machine Interfaces: Matlab ExercisesboucharebNo ratings yet
- Random : Random Seed Getstate Setstate GetrandbitsDocument8 pagesRandom : Random Seed Getstate Setstate GetrandbitsNe vaznhoNo ratings yet
- Phase 2 Activity 1 Integration MATLABDocument32 pagesPhase 2 Activity 1 Integration MATLABDiego RamosNo ratings yet
- Lecture 5 - Multi-Layer Feedforward Neural Networks Using Matlab Part 1Document4 pagesLecture 5 - Multi-Layer Feedforward Neural Networks Using Matlab Part 1meazamaliNo ratings yet
- Laboratory Work #1 Researching Interface of The MATLAB, Working With Numbers and Arrays, Plotting 1d FunctionsDocument16 pagesLaboratory Work #1 Researching Interface of The MATLAB, Working With Numbers and Arrays, Plotting 1d FunctionsОлександр Андрійович КлименкоNo ratings yet
- Application Studies For Control System DesignDocument7 pagesApplication Studies For Control System DesignhanythekingNo ratings yet
- Backpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningFrom EverandBackpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningNo ratings yet
- SSC Study Website ReviewDocument220 pagesSSC Study Website ReviewRavish YadavNo ratings yet
- NSB Recruitment 2 Final 2023Document11 pagesNSB Recruitment 2 Final 2023Ravish YadavNo ratings yet
- Shri Vishwakarma Skill University: Admission Form For Phd. Session: - 2020-21Document2 pagesShri Vishwakarma Skill University: Admission Form For Phd. Session: - 2020-21Ravish YadavNo ratings yet
- Bic PsoDocument29 pagesBic PsoAlisson Pereira AnjosNo ratings yet
- Welcome To Made Easy - PDF Signal AdDocument23 pagesWelcome To Made Easy - PDF Signal AdRavish YadavNo ratings yet
- Chandresh Agrawal Mca BooksDocument3 pagesChandresh Agrawal Mca BooksRavish Yadav20% (10)
- PhD Admission Notification 2020-21 at Shri Vishwakarma Skill UniversityDocument1 pagePhD Admission Notification 2020-21 at Shri Vishwakarma Skill UniversityRavish YadavNo ratings yet
- PX C 3872894Document5 pagesPX C 3872894hn317No ratings yet
- Singh 2008Document5 pagesSingh 2008Ravish YadavNo ratings yet
- Probabilistic Choice Risk Analysis Conflicts and Synthesis IN System Planning EngDocument6 pagesProbabilistic Choice Risk Analysis Conflicts and Synthesis IN System Planning EngRavish YadavNo ratings yet
- ResultsDocument9 pagesResultsRavish YadavNo ratings yet
- Particle Swarm Optimization - TutorialDocument5 pagesParticle Swarm Optimization - TutorialRavish YadavNo ratings yet
- Welcome To Made Easy - PDF Ad2Document41 pagesWelcome To Made Easy - PDF Ad2Ravish YadavNo ratings yet
- Welcome To Made Easy - PDF Signal AdDocument23 pagesWelcome To Made Easy - PDF Signal AdRavish YadavNo ratings yet
- Motor Sangkar Tupai - MesinDocument24 pagesMotor Sangkar Tupai - MesinKuri-kuri DorayakiNo ratings yet
- Revised PG PH.D Curriculam PDFDocument239 pagesRevised PG PH.D Curriculam PDFherokaboss1987No ratings yet
- 1 - 1electrical Machines II Prof. Krishna Vasudevan, Prof. G. Sridhara Rao, Prof. P. Sasidhara RaoDocument1 page1 - 1electrical Machines II Prof. Krishna Vasudevan, Prof. G. Sridhara Rao, Prof. P. Sasidhara RaoaaNo ratings yet
- Welcome To Made Easy - PDF Advance ControlDocument24 pagesWelcome To Made Easy - PDF Advance ControlRavish YadavNo ratings yet
- NIT MeghalayaDocument1 pageNIT MeghalayaRavish YadavNo ratings yet
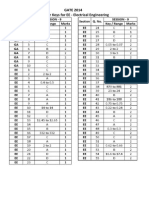
- GATE 2014 Answer Keys For EE Electrical EngineeringDocument1 pageGATE 2014 Answer Keys For EE Electrical Engineeringsreenivasroyal8No ratings yet
- Question No. 1: View SolutionDocument20 pagesQuestion No. 1: View SolutionRavish YadavNo ratings yet
- GATE 2014 Answer Keys For EC Electronics and Communication EngineeringDocument1 pageGATE 2014 Answer Keys For EC Electronics and Communication EngineeringMirishkar S GaneshNo ratings yet
- Physical Reporting 2014Document1 pagePhysical Reporting 2014Ravish YadavNo ratings yet
- "Orientation & Course Registration": Schedule ForDocument1 page"Orientation & Course Registration": Schedule ForRavish YadavNo ratings yet
- Book List 14-15Document144 pagesBook List 14-15Ravish YadavNo ratings yet
- National Institute of Technology, Hamirpur (H.P.) - 177 005: UndertakingDocument1 pageNational Institute of Technology, Hamirpur (H.P.) - 177 005: UndertakingRavish YadavNo ratings yet
- Start Close RankMEAdmissionDocument1 pageStart Close RankMEAdmissionRavish YadavNo ratings yet
- Start Close RankMEAdmissionDocument1 pageStart Close RankMEAdmissionRavish YadavNo ratings yet
- M.Arch AdDocument18 pagesM.Arch AdRavish YadavNo ratings yet
- Distance Rate Time Word ProblemsDocument4 pagesDistance Rate Time Word Problemsapi-286443551No ratings yet
- 0 EDEM Applications MeDocument16 pages0 EDEM Applications MeRuben PurcaNo ratings yet
- Nabl 400 PDFDocument275 pagesNabl 400 PDFMovin Menezes100% (1)
- Electric Bike Charging Infrastructure Project ScopeDocument2 pagesElectric Bike Charging Infrastructure Project Scopetupai_ubiNo ratings yet
- Implementing ISA S88 For A Discrete Process With The Bottom-Up ApproachDocument10 pagesImplementing ISA S88 For A Discrete Process With The Bottom-Up ApproachPaulo Ricardo Siqueira SoaresNo ratings yet
- Conveyor Design PDFDocument73 pagesConveyor Design PDFRamesh Subramani RamachandranNo ratings yet
- User Exit Macro BAdi Wid ExampleDocument19 pagesUser Exit Macro BAdi Wid ExampleSundaran NairNo ratings yet
- PallaDocument16 pagesPallaJuan Alberto Giglio FernándezNo ratings yet
- ASME PTC 22 (1997) Gas Turbines PDFDocument46 pagesASME PTC 22 (1997) Gas Turbines PDFDaniel OrigelNo ratings yet
- Project ReportDocument19 pagesProject ReportEr Nandkishor Prajapati86% (7)
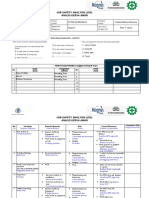
- JSA Unstuffing Air Charge Intake...Document5 pagesJSA Unstuffing Air Charge Intake...warryNo ratings yet
- Company Brochure 2023Document2 pagesCompany Brochure 2023Leon du PlessisNo ratings yet
- Carlson Hotel WorldwideDocument2 pagesCarlson Hotel WorldwidechrstNo ratings yet
- Vocational Training ProgramDocument6 pagesVocational Training ProgramolabodeogunNo ratings yet
- Victoria ChemicalDocument10 pagesVictoria ChemicalBobYu0% (1)
- The 62443 Series OverviewDocument4 pagesThe 62443 Series OverviewJuan RiveraNo ratings yet
- 6.1 Item Code and ReplenishDocument10 pages6.1 Item Code and ReplenishMohamed AnwarNo ratings yet
- Kathrein X-polarized Adjustable Electrical Downtilt Antenna FeaturesDocument2 pagesKathrein X-polarized Adjustable Electrical Downtilt Antenna Featuresbluebird1969100% (1)
- SQL Server Migration Offer DatasheetDocument1 pageSQL Server Migration Offer Datasheetsajal_0171No ratings yet
- A Measurement of Shipbuilding ProductivityDocument9 pagesA Measurement of Shipbuilding Productivitymahmoud hosnyNo ratings yet
- Slam Shut Valve Emerson WellskidDocument28 pagesSlam Shut Valve Emerson Wellskidcloudno911No ratings yet
- Doc13852681f290020160603122731 SKL User Guide V15 June 2016Document22 pagesDoc13852681f290020160603122731 SKL User Guide V15 June 2016Jose PulidoNo ratings yet
- Ce Const2 220kv CB Siemens 2012Document18 pagesCe Const2 220kv CB Siemens 2012erkamlakar2234100% (1)
- Gabion Wall: Design Information SheetDocument3 pagesGabion Wall: Design Information SheetAnonymous MAQrYFQDzVNo ratings yet
- Chaderton Barbara AS400Document3 pagesChaderton Barbara AS400Sivakumar RajuNo ratings yet
- Scheduling Resources and Costs: Chapter EightDocument15 pagesScheduling Resources and Costs: Chapter EightArnór Scribd JónssonNo ratings yet
- OBO ForskruningerDocument126 pagesOBO ForskruningerkosthsNo ratings yet
- Packer Shoes Casing Manual Section 7Document22 pagesPacker Shoes Casing Manual Section 7Tong Chaipanyakul100% (1)
- 1 Maritime TransportDocument413 pages1 Maritime TransportWondwosen Tiruneh100% (1)
- Auto Parts Inventory SystemDocument4 pagesAuto Parts Inventory SystemVince Ryan L. ArboledaNo ratings yet