You might also like
- Quality Assessment in Image Compression by Using Fast Wavelet Transformation With 2D Haar WaveletsDocument11 pagesQuality Assessment in Image Compression by Using Fast Wavelet Transformation With 2D Haar WaveletsAnonymous kw8Yrp0R5rNo ratings yet
- Shadow Detection and Removal of Panchromatic Satellite ImagesDocument5 pagesShadow Detection and Removal of Panchromatic Satellite ImagesAnonymous kw8Yrp0R5rNo ratings yet
- Systematic Layout Planning: A Review of Improvement Inapproach To Pulse Processing MillsDocument5 pagesSystematic Layout Planning: A Review of Improvement Inapproach To Pulse Processing MillsAnonymous kw8Yrp0R5rNo ratings yet
- A Modernization Procedure For The Maintenance of Printing MachineryDocument5 pagesA Modernization Procedure For The Maintenance of Printing MachineryAnonymous kw8Yrp0R5rNo ratings yet
- Distributed Certificate Authority Based Trusted AD-HOC Vector Routing Protocol in Wireless Mesh NetworkDocument9 pagesDistributed Certificate Authority Based Trusted AD-HOC Vector Routing Protocol in Wireless Mesh NetworkAnonymous kw8Yrp0R5rNo ratings yet
- Smart Way of Garbage CollectionDocument2 pagesSmart Way of Garbage CollectionAnonymous kw8Yrp0R5rNo ratings yet
- Integration of Social Database With UID Aadhar For Elimination of Fake Social ProfilesDocument4 pagesIntegration of Social Database With UID Aadhar For Elimination of Fake Social ProfilesAnonymous kw8Yrp0R5rNo ratings yet
- Automation of Black Board Duster For Ergonomics and Chalk Dust SuppressionDocument4 pagesAutomation of Black Board Duster For Ergonomics and Chalk Dust SuppressionAnonymous kw8Yrp0R5rNo ratings yet
- A Review of GRIHA Certification With Real Life ProjectDocument4 pagesA Review of GRIHA Certification With Real Life ProjectAnonymous kw8Yrp0R5rNo ratings yet
- Fuzzy Based Boost Converter Control For Wind Energy Conversion SystemDocument9 pagesFuzzy Based Boost Converter Control For Wind Energy Conversion SystemAnonymous kw8Yrp0R5rNo ratings yet
- Load Balancing For Cloud Ecosystem Using Energy Aware Application Scaling MethodologiesDocument4 pagesLoad Balancing For Cloud Ecosystem Using Energy Aware Application Scaling MethodologiesAnonymous kw8Yrp0R5rNo ratings yet
- Strength Behaviour of Concrete Using Polymer Modified and Steel Fiber Reinforced ConcreteDocument3 pagesStrength Behaviour of Concrete Using Polymer Modified and Steel Fiber Reinforced ConcreteAnonymous kw8Yrp0R5rNo ratings yet
- Design Methodology of Steering System For All-Terrain VehiclesDocument7 pagesDesign Methodology of Steering System For All-Terrain VehiclesAnonymous kw8Yrp0R5rNo ratings yet
- Finite Element Analysis Based Structural Analysis of Horizontal Tube Sheet FiltersDocument8 pagesFinite Element Analysis Based Structural Analysis of Horizontal Tube Sheet FiltersAnonymous kw8Yrp0R5rNo ratings yet
- Design and Development of A Transmission System For An All-Terrain VehicleDocument7 pagesDesign and Development of A Transmission System For An All-Terrain VehicleAnonymous kw8Yrp0R5rNo ratings yet
- Review On Performance and Emission Characteristics of Different Types Fish Oil Biodiesel As An Alternative To The Conventional Diesel Fuel in C.I. EngineDocument6 pagesReview On Performance and Emission Characteristics of Different Types Fish Oil Biodiesel As An Alternative To The Conventional Diesel Fuel in C.I. EngineAnonymous kw8Yrp0R5rNo ratings yet
- Detecting Paraphrases in Tamil Language SentencesDocument5 pagesDetecting Paraphrases in Tamil Language SentencesAnonymous kw8Yrp0R5rNo ratings yet
- Impact Analysis On Slabs - A ReviewDocument4 pagesImpact Analysis On Slabs - A ReviewAnonymous kw8Yrp0R5rNo ratings yet
- Color Image Encryption and Decryption by Using Chaotic Baker Map Bit InterleaverDocument4 pagesColor Image Encryption and Decryption by Using Chaotic Baker Map Bit InterleaverAnonymous kw8Yrp0R5rNo ratings yet
- Vapour Adsorption and Recovery Using Fluidized Bed Reactor: A StudyDocument4 pagesVapour Adsorption and Recovery Using Fluidized Bed Reactor: A StudyAnonymous kw8Yrp0R5rNo ratings yet
- Structural Analysis of Gas Turbine BladeDocument4 pagesStructural Analysis of Gas Turbine BladeAnonymous kw8Yrp0R5rNo ratings yet
- Android Java Compiler Using CloudDocument4 pagesAndroid Java Compiler Using CloudAnonymous kw8Yrp0R5rNo ratings yet
- Design and Analysis of Frame of An All-Terrain VehicleDocument5 pagesDesign and Analysis of Frame of An All-Terrain VehicleAnonymous kw8Yrp0R5rNo ratings yet
- Experimental Analysis and Statistical Optimization of Effect of Heat Treatment Distortion in DIP Variation in An Idler GearDocument3 pagesExperimental Analysis and Statistical Optimization of Effect of Heat Treatment Distortion in DIP Variation in An Idler GearAnonymous kw8Yrp0R5rNo ratings yet
- SMAW Process Parameters Optimization Using Taguchi & Fuzzy LogicDocument3 pagesSMAW Process Parameters Optimization Using Taguchi & Fuzzy LogicAnonymous kw8Yrp0R5rNo ratings yet
- Direct Photometry Non Invasive Bilirubin DeviceDocument4 pagesDirect Photometry Non Invasive Bilirubin DeviceAnonymous kw8Yrp0R5rNo ratings yet
- Solar Powered Auto Irrigation System Using GSM ModuleDocument4 pagesSolar Powered Auto Irrigation System Using GSM ModuleAnonymous kw8Yrp0R5rNo ratings yet
- Parameteric Optimization of TIG Welding On Joint of Stainless Steel (316) & Mild Steel Using Taguchi TechniqueDocument5 pagesParameteric Optimization of TIG Welding On Joint of Stainless Steel (316) & Mild Steel Using Taguchi TechniqueAnonymous kw8Yrp0R5rNo ratings yet
- IRJET WebBasedtestingDocument4 pagesIRJET WebBasedtestingDrRohini SharmaNo ratings yet
- Comparative Study of Voltage Source Inverter With Z Source InverterDocument6 pagesComparative Study of Voltage Source Inverter With Z Source InverterAnonymous kw8Yrp0R5rNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Python Lab Cycle - ITDocument4 pagesPython Lab Cycle - ITeswar jrNo ratings yet
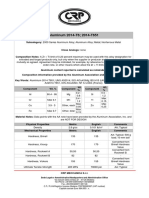
- Aluminium 2014 t6 2014 t651 PDFDocument3 pagesAluminium 2014 t6 2014 t651 PDFAbhishek AnandNo ratings yet
- Grade 9: Federal Democrati C Republi C OF Ethi OPI A MI NI Stry OF Educati ONDocument324 pagesGrade 9: Federal Democrati C Republi C OF Ethi OPI A MI NI Stry OF Educati ONየየጁ ልጅ እኔNo ratings yet
- SURA'S 7th STD 5 in 1 Term 3 EM Sample Study MaterialsDocument112 pagesSURA'S 7th STD 5 in 1 Term 3 EM Sample Study Materialssanjay0% (1)
- Business Math CBLM Com MathDocument54 pagesBusiness Math CBLM Com MathJoy CelestialNo ratings yet
- PythonDocument126 pagesPythonATUL SHARMANo ratings yet
- Makoto Umeki - A Locally Induced Homoclinic Motion of The Vortex FilamentDocument2 pagesMakoto Umeki - A Locally Induced Homoclinic Motion of The Vortex FilamentVing666789No ratings yet
- List of TheoremsDocument2 pagesList of Theoremskyut netoNo ratings yet
- Matrix Inversion Method and ApplicationsDocument5 pagesMatrix Inversion Method and ApplicationsAjeeth KumarNo ratings yet
- Electric Circuit Variables and ElementsDocument30 pagesElectric Circuit Variables and Elementsjessdoria100% (3)
- Mining Surveying Lecture Notes-II: Assoc - Prof.Dr. Nursu TunalıoğluDocument26 pagesMining Surveying Lecture Notes-II: Assoc - Prof.Dr. Nursu TunalıoğluEnes AslanNo ratings yet
- Sample Paper 10: Class - X Exam 2021-22 (TERM - II) Mathematics BasicDocument3 pagesSample Paper 10: Class - X Exam 2021-22 (TERM - II) Mathematics BasicTanushi GulatiNo ratings yet
- Modulation Techniques and Transmission SystemsDocument13 pagesModulation Techniques and Transmission SystemsBassel Imad Al AawarNo ratings yet
- CAPM - An Absured ModelDocument17 pagesCAPM - An Absured ModelanalysesNo ratings yet
- Format LecDocument71 pagesFormat LecACES JEEL CENDA�ANo ratings yet
- Complex Analysis and CR GeometryDocument205 pagesComplex Analysis and CR Geometryfelipeplatzi100% (1)
- Bingo: Multiplication & DivisionDocument18 pagesBingo: Multiplication & DivisionRosalee KitchenNo ratings yet
- Nov 2005 4HDocument20 pagesNov 2005 4HpappadutNo ratings yet
- The Chi-Squared Test With TI-Nspire IB10Document5 pagesThe Chi-Squared Test With TI-Nspire IB10p_gyftopoulosNo ratings yet
- Pronominal Anaphora Resolution inDocument7 pagesPronominal Anaphora Resolution inijfcstjournalNo ratings yet
- SofaDocument17 pagesSofagobinathdpi100% (1)
- MATLAB TutorialDocument182 pagesMATLAB Tutorialxfreshtodef123No ratings yet
- Sample Question Paper - 8Document5 pagesSample Question Paper - 8first lastNo ratings yet
- Maths - SPATIAL REASONING & GEOMETRY - Unit Plan R/1Document3 pagesMaths - SPATIAL REASONING & GEOMETRY - Unit Plan R/1mbed2010No ratings yet
- Stein Corporation Wants To Find An Equation To Estimate Some of Their Monthly Operating Costs For The Operating Budget For 2018Document2 pagesStein Corporation Wants To Find An Equation To Estimate Some of Their Monthly Operating Costs For The Operating Budget For 2018Elliot RichardNo ratings yet
- AverageDocument4 pagesAveragerauf tabassumNo ratings yet
- ES105 - Section I - Winter 2020 ExamDocument2 pagesES105 - Section I - Winter 2020 ExamAadil VahoraNo ratings yet
- Pitch FinalDocument9 pagesPitch FinalShadan QureshiNo ratings yet
- Atomic Physics ExamDocument3 pagesAtomic Physics Examvasudevan m.vNo ratings yet