You might also like
- Flymentor 3D Manual Del Usuario. SHENZHEN KDS MODELO Technologies Co., LTD. PrólogoDocument22 pagesFlymentor 3D Manual Del Usuario. SHENZHEN KDS MODELO Technologies Co., LTD. PrólogoYohan DiazNo ratings yet
- TDS6301 Uap02 Ap05 GL09Document14 pagesTDS6301 Uap02 Ap05 GL09Dieguito Gutierrez100% (1)
- Control Remoto para Ventilador de Pared Usando PIC16F628ADocument6 pagesControl Remoto para Ventilador de Pared Usando PIC16F628ARafael Rincoón CNo ratings yet
- Dodge Vision Ficha Tecnica 2018Document2 pagesDodge Vision Ficha Tecnica 2018TonyKch100% (1)
- Conectiviad y RedesDocument51 pagesConectiviad y RedesYanh Nicolas Castillo DiazNo ratings yet
- Descripcion de Una Interfaz OBDII Parte 3 PDFDocument6 pagesDescripcion de Una Interfaz OBDII Parte 3 PDFcristian100% (1)
- Sensor MAP - Inyección Electrónica.Document6 pagesSensor MAP - Inyección Electrónica.Héctor CangásNo ratings yet
- Catalogo Motores Monofasicos Mayo 2007Document12 pagesCatalogo Motores Monofasicos Mayo 2007aguirrejulio07No ratings yet
- Esquemas Conexión CCTV ActualDocument21 pagesEsquemas Conexión CCTV ActualRomulo OrtegaNo ratings yet
- Dodge VisionDocument4 pagesDodge VisionDan GNo ratings yet
- Manual NSSWDocument95 pagesManual NSSWMauricio Portillo G.No ratings yet
- T 0001276Document136 pagesT 0001276jorge Angel LopeNo ratings yet
- Contrato 3034453-Ingenieria de Detalle Control de Acceso CCODocument25 pagesContrato 3034453-Ingenieria de Detalle Control de Acceso CCOsofia hernandezNo ratings yet
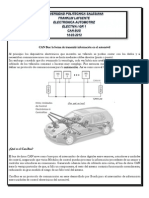
- CAN BusDocument3 pagesCAN BusFranklin Orlando Lafuente SolórzanoNo ratings yet
- Uso Del Osciloscopio, Sistema Obd II, Generación de CódigosDocument16 pagesUso Del Osciloscopio, Sistema Obd II, Generación de CódigosAndrés Edisson ÁguilaNo ratings yet
- Como Programar Mariposa ElectronicaDocument1 pageComo Programar Mariposa ElectronicaDanielNo ratings yet
- AutotrónicaDocument153 pagesAutotrónicaEhf SainkNo ratings yet
- Manual Infiniti QX60Document538 pagesManual Infiniti QX60Soporte Especial100% (1)
- Motor - Caja de Cambios Manual de 5 Velocidades - MT75Document19 pagesMotor - Caja de Cambios Manual de 5 Velocidades - MT75Sergio MoralesNo ratings yet
- IntalioDocument44 pagesIntalioMike SeguraNo ratings yet
- Topología de La RedDocument4 pagesTopología de La RedBruno Daniel100% (1)
- Alarma Genius 1B 4bot Se V3Document18 pagesAlarma Genius 1B 4bot Se V3jhonny1804No ratings yet
- 05 GBRU Operator Guide SpanishDocument92 pages05 GBRU Operator Guide SpanishMortal CombatNo ratings yet
- WerfDocument26 pagesWerfAlan PillajoNo ratings yet
- Genius2009low CatalogoDocument28 pagesGenius2009low Catalogohenrydav_oNo ratings yet
- Faq J2534Document10 pagesFaq J2534AutotronicaGlobal AutotronicaGlobalNo ratings yet
- C915e Manual Del PropietarioDocument248 pagesC915e Manual Del Propietariovegamarco80No ratings yet
- Hacking RFID, Rompiendo La Seguridad de Mifare (I)Document2 pagesHacking RFID, Rompiendo La Seguridad de Mifare (I)ronal553No ratings yet
- Como Hacer Un Probador de Bobinas Encendido CaseroDocument18 pagesComo Hacer Un Probador de Bobinas Encendido CaseroLuis MezaNo ratings yet
- Curso Enlaces DigitalesDocument130 pagesCurso Enlaces Digitalesprueba100No ratings yet
- Instalar IBM Informix en CentOS Linux 5.5 - El Hombre Que Reventó de InformaDocument5 pagesInstalar IBM Informix en CentOS Linux 5.5 - El Hombre Que Reventó de InformaCastle CastleNo ratings yet
- ManualTK 103Document44 pagesManualTK 103Julian GarciaNo ratings yet
- Sensor TEMPERATURADocument9 pagesSensor TEMPERATURAGustavo Antonio Bustamante CarrilloNo ratings yet
- Trabajo Coches EléctricosDocument36 pagesTrabajo Coches EléctricosOrlandoNo ratings yet
- Manual Caja RS232Document8 pagesManual Caja RS232checko_1258No ratings yet
- C5 AbsDocument18 pagesC5 AbsAbraham CordovasotoNo ratings yet
- La Distribución Variable y La Sincronización de Los Tiempos Del MotorDocument10 pagesLa Distribución Variable y La Sincronización de Los Tiempos Del MotorJose Sagastegui GuevaraNo ratings yet
- Guia de Resolucion de Fallas C30Document280 pagesGuia de Resolucion de Fallas C30Gabriel VelardeNo ratings yet
- Puntos para Que El Scaner Funcion. Por Andrés Rivas SanchezDocument43 pagesPuntos para Que El Scaner Funcion. Por Andrés Rivas SanchezAlexanderAlexisOña100% (3)
- Sensores Genius de Retroceso4Document8 pagesSensores Genius de Retroceso4Kari Muñoz TapiaNo ratings yet
- Curso Camaras Ip TodoelectonicaDocument72 pagesCurso Camaras Ip TodoelectonicaCáceres Hans ElmerNo ratings yet
- Manual Usuario GlobalprotectDocument5 pagesManual Usuario GlobalprotectesnerNo ratings yet
- Technologia MULTIPLEXAJEDocument22 pagesTechnologia MULTIPLEXAJEDiego Vergara PinoNo ratings yet
- Características: Conector OBDDocument3 pagesCaracterísticas: Conector OBDJorge onelioNo ratings yet
- Airbags - AutodataDocument6 pagesAirbags - Autodataandressantiago sarmientopoveda100% (2)
- Diagnóstico Con Un Scanner AutomotrizDocument2 pagesDiagnóstico Con Un Scanner AutomotrizJavier De La RosaNo ratings yet
- CMU Serial AccessDocument4 pagesCMU Serial AccessANGEL DANIEL MUNGUIANo ratings yet
- Curso de Reprogramacion de CentralitasDocument13 pagesCurso de Reprogramacion de CentralitasRomán Osvaldo Alemán GonzálezNo ratings yet
- Monitoreo de Datos Del AutomovilDocument123 pagesMonitoreo de Datos Del Automovilwilliam_senati20057051No ratings yet
- Sistema de AlarmaDocument23 pagesSistema de AlarmaFRANK TORRES DIAZ100% (1)
- Multiplexado - RedesDocument22 pagesMultiplexado - Redescristian caizaNo ratings yet
- Las Cámaras de SeguridadDocument2 pagesLas Cámaras de SeguridadALBERTO MARIO CAICEDO ROYERONo ratings yet
- Rehobot Co.: Capacitación Electrónica Automotriz Simuladores y Proyectos Electrónicos A Tu AlcanceDocument3 pagesRehobot Co.: Capacitación Electrónica Automotriz Simuladores y Proyectos Electrónicos A Tu Alcanceclaudio huiliñirNo ratings yet
- 1709manual Operaciones Domo PTZ LS-C2016bc PDFDocument21 pages1709manual Operaciones Domo PTZ LS-C2016bc PDFRonald CastellarNo ratings yet
- Es oyster-visionIIIDocument28 pagesEs oyster-visionIIIPepeNo ratings yet
- RCI510 Setup Manual English - En.es PDFDocument18 pagesRCI510 Setup Manual English - En.es PDFTom WilberNo ratings yet
- 6-Es Oyster V VisionDocument32 pages6-Es Oyster V Visionjoaquin ferNo ratings yet
- Capacitacion OperadoresDocument20 pagesCapacitacion OperadoresGus Joel Fierro Mendoza100% (1)
- MP Montaje PDFDocument18 pagesMP Montaje PDFjuanNo ratings yet
- PDF-phantom 4 - Dji - AsdDocument20 pagesPDF-phantom 4 - Dji - AsdcarlosNo ratings yet
- Introducción A La Termotransferencia - Camaraza Medina, YananDocument1,166 pagesIntroducción A La Termotransferencia - Camaraza Medina, YananCristian Clarke C100% (1)
- NCH 432Document41 pagesNCH 432Cristian Gustavo Ramos TorresNo ratings yet
- Energia Geotermica de Baja Temp - Creus Sole, AntonioDocument172 pagesEnergia Geotermica de Baja Temp - Creus Sole, AntonioCristian Clarke CNo ratings yet
- Manipulacion de Equipos Con Gas - Cano, JoseDocument142 pagesManipulacion de Equipos Con Gas - Cano, JoseCristian Clarke CNo ratings yet
- Normativa Vigente Sistema Constructivo Tradicional y No TradicionalDocument1 pageNormativa Vigente Sistema Constructivo Tradicional y No TradicionalJaime Hernandez ElguetaNo ratings yet
- Libro de HidráulicaDocument136 pagesLibro de HidráulicaManuel PeñaNo ratings yet
- Daikin Rxyq PDocument145 pagesDaikin Rxyq PCristian Clarke CNo ratings yet
- NCH 1079Document45 pagesNCH 1079Cristian Clarke C67% (3)
- Introducción A La Historia de La PsicopatologiaDocument178 pagesIntroducción A La Historia de La PsicopatologiaCristian Clarke CNo ratings yet
- Tendencias de Uso de Refrigerante.Document90 pagesTendencias de Uso de Refrigerante.Cristian Clarke CNo ratings yet
- Diseñor de Maquinaria Agricola en Solidworks PDFDocument156 pagesDiseñor de Maquinaria Agricola en Solidworks PDFfernando100% (1)
- NCH RefrigeracionDocument47 pagesNCH RefrigeracionRicardo Alexis Fuentes LufittNo ratings yet
- COOLPACK Tutorial - EspañolDocument45 pagesCOOLPACK Tutorial - EspañolDomingo Ortiz Ortiz80% (5)
- Ejercicios Solidworks PDFDocument31 pagesEjercicios Solidworks PDFCristian Clarke CNo ratings yet
- Manual Bomba Gp5152Document21 pagesManual Bomba Gp5152Cristian Clarke CNo ratings yet
- NCH 432Document41 pagesNCH 432Cristian Gustavo Ramos TorresNo ratings yet
- Maquinas Termicas de RefrigeracionDocument23 pagesMaquinas Termicas de RefrigeracionFrOy Zas XdNo ratings yet
- Guías Técnicas para La Rehabilitación de La Envolvente Térmica de Los Edificios Nº 7Document68 pagesGuías Técnicas para La Rehabilitación de La Envolvente Térmica de Los Edificios Nº 7carmelo_maduroNo ratings yet
- Evaporadores NH3Document21 pagesEvaporadores NH3Cristian Clarke CNo ratings yet
- Curso de Refrigeracion Mejorado FAVDocument31 pagesCurso de Refrigeracion Mejorado FAVCristian Clarke CNo ratings yet
- Tecnologia MecanicaDocument22 pagesTecnologia Mecanicajavirv19No ratings yet
- Limites de Aplicacion de CompresoresDocument27 pagesLimites de Aplicacion de CompresoresCristian Clarke C100% (2)
- Tecnología Eléctrica PDFDocument19 pagesTecnología Eléctrica PDFpolicomiNo ratings yet
- El Hombre de PlataDocument4 pagesEl Hombre de PlataEve LynNo ratings yet
- Simak, Clifford D - CiudadDocument193 pagesSimak, Clifford D - Ciudadapi-3800925100% (1)
- Ivar Jorgenson - CIUDAD IMPLACABLEDocument35 pagesIvar Jorgenson - CIUDAD IMPLACABLEnsgalNo ratings yet
- Simak, Clifford D - A La Otra Orilla Del Rio A Traves Del BosqueDocument10 pagesSimak, Clifford D - A La Otra Orilla Del Rio A Traves Del Bosqueapi-3800925No ratings yet
- Catulo - Algunos Poemas A LesbiaDocument5 pagesCatulo - Algunos Poemas A LesbialafeluNo ratings yet
- Apuntes de Maquinas (Calefaccion Por Radiadores) PDFDocument18 pagesApuntes de Maquinas (Calefaccion Por Radiadores) PDFManolo Cortes100% (1)
- Para EntregarDocument65 pagesPara EntregarLoxan MartinezNo ratings yet
- Purificadora de AguaDocument16 pagesPurificadora de AguaHugo OlivaresNo ratings yet
- Convenio Colectivo Del MetalDocument172 pagesConvenio Colectivo Del MetalJavier PérezNo ratings yet
- Taller Clasificacion CostosDocument4 pagesTaller Clasificacion Costoslaura100% (1)
- Cart OnesDocument9 pagesCart OnesAnthony Flores FloresNo ratings yet
- Trabajo Sobre "El Día Que David Venció A Goliat"Document4 pagesTrabajo Sobre "El Día Que David Venció A Goliat"JuanE.G.QüenzaNo ratings yet
- RCS Contratos Construccion SunatDocument3 pagesRCS Contratos Construccion SunatRuben Cruz SNo ratings yet
- SP 01V PDFDocument34 pagesSP 01V PDFSergio GabrielNo ratings yet
- Ficha de Manejo Programas Ambientales Sigeam v1.0Document3 pagesFicha de Manejo Programas Ambientales Sigeam v1.0Gabriel Jaime Valbuena QuirogaNo ratings yet
- Propuesta Modelo de Gestión SERGUTDocument67 pagesPropuesta Modelo de Gestión SERGUTCarlos ChiriNo ratings yet
- Informe #007-2013-Labr-Ociu-UniDocument7 pagesInforme #007-2013-Labr-Ociu-UniFatima MarahNo ratings yet
- Trabajo de R1Document17 pagesTrabajo de R1Darko Nesterenko100% (1)
- Documento 1Document18 pagesDocumento 1Ramon PerezNo ratings yet
- Barras de Perforacion Todos Los Tipos.... BuenoDocument19 pagesBarras de Perforacion Todos Los Tipos.... BuenoDanny Steven LimayNo ratings yet
- Sistemas Empresario Industrial GF PP 18Document13 pagesSistemas Empresario Industrial GF PP 18Pedro GrNo ratings yet
- Propuesta Economica ProyectoDocument4 pagesPropuesta Economica ProyectoJHAIR ARMANDO ALVAREZNo ratings yet
- PPT Ohsas 18001 I, II, IIIDocument62 pagesPPT Ohsas 18001 I, II, IIIVictor Manuel50% (2)
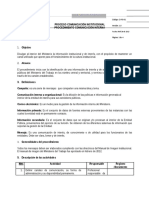
- Procedimiento Comunicacion Interna.Document6 pagesProcedimiento Comunicacion Interna.Luis LuqueNo ratings yet
- Inspección de Herramientas MenoresDocument1 pageInspección de Herramientas MenoresNilson Eduardo Ardila MateusNo ratings yet
- Anual 2019-2020Document12 pagesAnual 2019-2020JustoVillònGonzàlezNo ratings yet
- Plan de Requerimiento de CapacidadDocument8 pagesPlan de Requerimiento de Capacidadnilquier benitoNo ratings yet
- Formato ATSDocument2 pagesFormato ATSJhon AndersonNo ratings yet
- Caso LinioDocument8 pagesCaso LinioJhan Carlos Guerra EspejoNo ratings yet
- Metodo de Gestion Empleando PMBOK para Proyectos de Mantenimiento de Gruas MovilesDocument163 pagesMetodo de Gestion Empleando PMBOK para Proyectos de Mantenimiento de Gruas MovilesErrol NietoNo ratings yet
- Especificaciones Tecnicas Del Cerco PerimetricoDocument33 pagesEspecificaciones Tecnicas Del Cerco PerimetricoHugo César Chilcón MontalvoNo ratings yet
- Sistemas ERPDocument3 pagesSistemas ERPEvelyn FilipiniNo ratings yet
- Es Rotulas SKFDocument136 pagesEs Rotulas SKFJaime SuaNo ratings yet
- Trabajo de Investigacion - El Internet de Las CosasDocument61 pagesTrabajo de Investigacion - El Internet de Las CosasCarmen Liliana Siu Yon100% (5)
- Botas de Seguridad SAGA Especificaciones TécnicasDocument2 pagesBotas de Seguridad SAGA Especificaciones TécnicasFabiola AguileraNo ratings yet
- Rev Sup - Valorización Carpinteria Metalica - Bianco Parque Graña - Val 3 - 25.11.20Document8 pagesRev Sup - Valorización Carpinteria Metalica - Bianco Parque Graña - Val 3 - 25.11.20Vidal MatosNo ratings yet