You might also like
- Calculo Del Perfil de Una LevaDocument24 pagesCalculo Del Perfil de Una LevaBeto Miranda ConsueloNo ratings yet
- SistemasMecanicosCIMDocument2 pagesSistemasMecanicosCIMSofia LeonNo ratings yet
- Dinámica rotacional poleaDocument14 pagesDinámica rotacional poleaCarlos Rojas EspinozaNo ratings yet
- Capítulo 5.-Cinémática y Dinámica Del Sólido Rígido.Document4 pagesCapítulo 5.-Cinémática y Dinámica Del Sólido Rígido.Roberto E. MencíaNo ratings yet
- Mecanismo para Alinear Placas Apiladas2jhkjikDocument4 pagesMecanismo para Alinear Placas Apiladas2jhkjikjuan david padillaNo ratings yet
- Anáslisis de Posición y Velocidad Colisa.Document46 pagesAnáslisis de Posición y Velocidad Colisa.david_voca3100% (1)
- Reductor Planetario-TurboheliceDocument8 pagesReductor Planetario-TurboheliceJuan Carlos RuizNo ratings yet
- Gato electromecánico de tijeraDocument28 pagesGato electromecánico de tijeraJosephmessi sebasNo ratings yet
- Máquinas simples: poleas y palancasDocument5 pagesMáquinas simples: poleas y palancasjosejairocalixto0510No ratings yet
- Actividad 1 Diseño y Procesamiento MecanicoDocument3 pagesActividad 1 Diseño y Procesamiento MecanicoLeandro chavezNo ratings yet
- Conceptos VibracionesDocument11 pagesConceptos VibracionesAldo Alvarez100% (1)
- Ud02-Sistemas de TransformaciónDocument16 pagesUd02-Sistemas de TransformaciónNuria Franco VidalNo ratings yet
- Inyección Electrónica Multipunto (E y F)Document12 pagesInyección Electrónica Multipunto (E y F)Darien Reyes Couoh100% (1)
- Síntesis de MecanismosDocument2 pagesSíntesis de Mecanismosmiguelangelbarrera100% (1)
- Actuadores Neumáticos PDFDocument43 pagesActuadores Neumáticos PDFMeza DhayanNo ratings yet
- Historia de Los RobotsDocument9 pagesHistoria de Los RobotsLeonardoAlomiaNo ratings yet
- Sistemas de coordenadas cartesianas para mecanismosDocument3 pagesSistemas de coordenadas cartesianas para mecanismosJuan DE Jesus ReyesNo ratings yet
- Modelado matemático de un cuadricóptero usando ecuaciones de Euler-LaGrangeDocument29 pagesModelado matemático de un cuadricóptero usando ecuaciones de Euler-LaGrangeSebastian GuzmanNo ratings yet
- Sistemas Dirección Suspensión 1Document130 pagesSistemas Dirección Suspensión 1Rider Sancal50% (2)
- Admisión y EscapeDocument12 pagesAdmisión y Escapejoaquin oyarzunNo ratings yet
- Historia y normalización del dibujo técnicoDocument15 pagesHistoria y normalización del dibujo técnicoevertNo ratings yet
- Unidad 4 Seleccion de Elementos Campos, Sanchez Andrade, ZamoraDocument32 pagesUnidad 4 Seleccion de Elementos Campos, Sanchez Andrade, ZamoraAlejandro CamposNo ratings yet
- Que Es El AlexómetroDocument5 pagesQue Es El AlexómetroThomas SolidarioNo ratings yet
- Monografia GrupalDocument14 pagesMonografia GrupalGinaNo ratings yet
- Presentación Circuitos Hidráulicos y NeumáticosDocument67 pagesPresentación Circuitos Hidráulicos y Neumáticosyennipt02No ratings yet
- Cinemática de MecanismosDocument6 pagesCinemática de MecanismosAstrid MeléndezNo ratings yet
- Analisis de Velocidad Metodo Grafico y AnaliticoDocument19 pagesAnalisis de Velocidad Metodo Grafico y AnaliticoSantiago Santiago LucasNo ratings yet
- Mimo Vs SisoDocument13 pagesMimo Vs SisorokajojiNo ratings yet
- Cuestionario Cinematica Cinetica MecanicaDocument6 pagesCuestionario Cinematica Cinetica Mecanicadiegomontd12No ratings yet
- Analisis Grafico de Velocidad y AceleracionDocument7 pagesAnalisis Grafico de Velocidad y AceleracionBrizelThaisNegronCabreraNo ratings yet
- Pinzas NeumaticasDocument2 pagesPinzas NeumaticasJose CabalNo ratings yet
- Estudio Técnico Del MicrometroDocument10 pagesEstudio Técnico Del MicrometroCarlos Eduardo Perez CandelaNo ratings yet
- Investigación de La Unidad 2.Document15 pagesInvestigación de La Unidad 2.is ccNo ratings yet
- Sensores y Actuadores D Euna Lavadora y Aire AcondicionadoDocument4 pagesSensores y Actuadores D Euna Lavadora y Aire AcondicionadoRØxë GamarraNo ratings yet
- Funcion de TransferenciaDocument7 pagesFuncion de TransferenciaJonathan VegaNo ratings yet
- Simulación Carrera Esqueleto Humano MATLABDocument17 pagesSimulación Carrera Esqueleto Humano MATLABEdgar Giovanni Acosta MartínezNo ratings yet
- Ecuaciones Lineales en Un Sistema NewtonianoDocument4 pagesEcuaciones Lineales en Un Sistema NewtonianoHugoGonzalezNo ratings yet
- Sistemas de Unidades, MetrologiaDocument48 pagesSistemas de Unidades, MetrologialuisNo ratings yet
- ANSYS Tridim01 PDFDocument39 pagesANSYS Tridim01 PDFBregy ChoqueNo ratings yet
- Presión y FluidosDocument2 pagesPresión y FluidosBelinyer Javier MercedesNo ratings yet
- Piston de FrenosDocument7 pagesPiston de FrenosGustavo VicierraNo ratings yet
- Electrónica Digital de Alta IntegraciónDocument69 pagesElectrónica Digital de Alta IntegraciónEFrenAriasHernandez50% (2)
- Mecánica técnica: principios y leyesDocument1 pageMecánica técnica: principios y leyesCivileCR100% (1)
- GeneradorSeñalesPWM1Hz150KHzLcdDocument8 pagesGeneradorSeñalesPWM1Hz150KHzLcdMauricioNo ratings yet
- Práctica 6Document6 pagesPráctica 6RayalNo ratings yet
- Evolucion Historica de Los Sistemas de ControlDocument6 pagesEvolucion Historica de Los Sistemas de ControlArturo Ramos100% (2)
- ENGRANAJES-MECANICADocument15 pagesENGRANAJES-MECANICAEddy RolanNo ratings yet
- Practica de VibracionesDocument1 pagePractica de VibracionesSteven MonárrezNo ratings yet
- Introducción a la neumática para técnicosDocument6 pagesIntroducción a la neumática para técnicosnoeliamvNo ratings yet
- Cuestionario sobre maquinas CNC: ventajas, precisión y códigosDocument2 pagesCuestionario sobre maquinas CNC: ventajas, precisión y códigosCracatoasNo ratings yet
- Unidad II - Sistemas LubricaciónDocument54 pagesUnidad II - Sistemas LubricaciónFranciscoNo ratings yet
- Electrodiálisis - ReversaDocument26 pagesElectrodiálisis - ReversaDaniel BolivarNo ratings yet
- Movimiento Acoplador - 5 PDFDocument47 pagesMovimiento Acoplador - 5 PDFGballack Mtz TNo ratings yet
- T11Document9 pagesT11Ms Pringles09No ratings yet
- Manual de Sistemas MecánicosDocument18 pagesManual de Sistemas MecánicosJaime LMNo ratings yet
- 1.1 Eslabonamientos.Document48 pages1.1 Eslabonamientos.Kei FreudNo ratings yet
- Unidad I - Diagrama Cinemático - Santaella YDocument11 pagesUnidad I - Diagrama Cinemático - Santaella YYsaac YhofrenNo ratings yet
- Unidad 1. - Introduccion A Los MecanismosDocument15 pagesUnidad 1. - Introduccion A Los Mecanismosnobamo100% (1)
- Introducción A Los MecanismosDocument24 pagesIntroducción A Los Mecanismospepa peponaNo ratings yet
- Clase 1Document26 pagesClase 1Abraham Angelo Cayetano AlvarezNo ratings yet
- Tesis Final-dca-2021-Erick R.G.G - Erick Rodrigo GuzmánDocument131 pagesTesis Final-dca-2021-Erick R.G.G - Erick Rodrigo GuzmánAmauri Quetzal Piña LopezNo ratings yet
- Analisis Del Funcionamiento de Un Piston y Sus Posibles MejorasDocument3 pagesAnalisis Del Funcionamiento de Un Piston y Sus Posibles MejorasAmauri Quetzal Piña LopezNo ratings yet
- Azoo Tubifex Worm MiDocument2 pagesAzoo Tubifex Worm MiAmauri Quetzal Piña LopezNo ratings yet
- Robot Proyecto 12Document4 pagesRobot Proyecto 12Amauri Quetzal Piña LopezNo ratings yet
- Inversor ReporteDocument6 pagesInversor ReporteAmauri Quetzal Piña LopezNo ratings yet
- Proyecto PistonDocument42 pagesProyecto PistonAmauri Quetzal Piña Lopez67% (3)
- Practica CeroDocument7 pagesPractica CeroAmauri Quetzal Piña LopezNo ratings yet
- Robot Proyecto 12Document12 pagesRobot Proyecto 12Amauri Quetzal Piña LopezNo ratings yet
- Evidencias ClaseDocument40 pagesEvidencias ClaseAmauri Quetzal Piña LopezNo ratings yet
- Sintesis de InvestigacionDocument3 pagesSintesis de InvestigacionAmauri Quetzal Piña LopezNo ratings yet
- Robot Proyecto 12Document12 pagesRobot Proyecto 12Amauri Quetzal Piña LopezNo ratings yet
- Cañon de GaussDocument9 pagesCañon de GaussAmauri Quetzal Piña LopezNo ratings yet
- FinalDocument8 pagesFinalAmauri Quetzal Piña LopezNo ratings yet
- Motor Monofásico de Polos SombreadosDocument1 pageMotor Monofásico de Polos SombreadosAmauri Quetzal Piña LopezNo ratings yet
- Marco TeoricoDocument4 pagesMarco TeoricoAmauri Quetzal Piña LopezNo ratings yet
- Uso de Las Maquinas HerramientasDocument11 pagesUso de Las Maquinas HerramientasAmauri Quetzal Piña LopezNo ratings yet
- Club Saber Electrónica - Electrónica DigitalDocument84 pagesClub Saber Electrónica - Electrónica DigitalSwami Salas Rosado100% (1)
- Paradigma de ProgramaciónDocument2 pagesParadigma de ProgramaciónAmauri Quetzal Piña LopezNo ratings yet
- Visita Industrial HolcimDocument21 pagesVisita Industrial HolcimAmauri Quetzal Piña LopezNo ratings yet
- Sintesis de InvestigacionDocument3 pagesSintesis de InvestigacionAmauri Quetzal Piña LopezNo ratings yet
- Manual de Motores ElectricosDocument70 pagesManual de Motores ElectricosAndres Videla Flores98% (306)
- ACT 4 ACOPIO PET Modificacion 2Document8 pagesACT 4 ACOPIO PET Modificacion 2Amauri Quetzal Piña LopezNo ratings yet
- Visita Industrial HolcimDocument21 pagesVisita Industrial HolcimAmauri Quetzal Piña LopezNo ratings yet
- Mecanismos-Introduccion Clase 1 2Document41 pagesMecanismos-Introduccion Clase 1 2Amauri Quetzal Piña LopezNo ratings yet
- Visita Industrial HolcimDocument21 pagesVisita Industrial HolcimAmauri Quetzal Piña LopezNo ratings yet
- Uso de Las Maquinas HerramientasDocument11 pagesUso de Las Maquinas HerramientasAmauri Quetzal Piña LopezNo ratings yet
- Problemas de CircunferenciaDocument3 pagesProblemas de CircunferenciaCristhiam Quispe VargasNo ratings yet
- Optica Geometrica PDFDocument10 pagesOptica Geometrica PDFJhon PabonNo ratings yet
- Intercambiadores de Calor: Consideraciones de DiseñoDocument20 pagesIntercambiadores de Calor: Consideraciones de DiseñoCursos Facultad de Ingeniería100% (5)
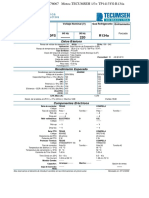
- Motor Tw1380ysDocument3 pagesMotor Tw1380ysJosé Eduardo100% (1)
- Curso de TermodinamicaDocument29 pagesCurso de TermodinamicaTiago SantosNo ratings yet
- L.M. Iii Tri 2°Document86 pagesL.M. Iii Tri 2°mmmmmmmNo ratings yet
- Evaluación III PERIODO 2016 BIOLOGÍA DOCENTE: Jairo Gutiérrez GRADO: OCTAVODocument3 pagesEvaluación III PERIODO 2016 BIOLOGÍA DOCENTE: Jairo Gutiérrez GRADO: OCTAVOJairo GutiNo ratings yet
- Instalación eléctrica: cálculo de secciones de cablesDocument42 pagesInstalación eléctrica: cálculo de secciones de cablesGianFranco Villegas Flores100% (4)
- La Métrica de Alcubierre (2do PARCIAL)Document2 pagesLa Métrica de Alcubierre (2do PARCIAL)Diana GomezNo ratings yet
- Temple acero 1045Document16 pagesTemple acero 1045IvanAdrianOHNo ratings yet
- Maquina HerramientaDocument20 pagesMaquina HerramientaFranklin LalaleoNo ratings yet
- El Transformador Monofásico - UTPDocument12 pagesEl Transformador Monofásico - UTPMikío Antonio Sánchez Achurra100% (1)
- 2.0 Balance Polar ElectromagneticoDocument9 pages2.0 Balance Polar ElectromagneticoAlida GuerreroNo ratings yet
- Lugol PDFDocument6 pagesLugol PDFIgnacio Candia RamosNo ratings yet
- Parábola ecuación curvaDocument6 pagesParábola ecuación curvaPaola JuarezNo ratings yet
- Construccion de La Grafica Del Espectro y La Identificacion de Los Elementos QuimicosDocument30 pagesConstruccion de La Grafica Del Espectro y La Identificacion de Los Elementos Quimicosapi-3733788100% (4)
- Cálculo potencia alterna circuitos trifásicosDocument8 pagesCálculo potencia alterna circuitos trifásicosalejandroNo ratings yet
- Unidad 2-Equipo 1 - Sistema de CogeneracionDocument114 pagesUnidad 2-Equipo 1 - Sistema de CogeneracionChristian Josue Capitan GtzNo ratings yet
- FLUJO NO PERMANENTE: Oscilaciones de Dos Depósitos de Sección Variable Comunicados Mediante Una TuberíaDocument32 pagesFLUJO NO PERMANENTE: Oscilaciones de Dos Depósitos de Sección Variable Comunicados Mediante Una TuberíaElvis Hancco QuitoNo ratings yet
- Practica 6 Circuitos FinalxDocument11 pagesPractica 6 Circuitos FinalxDiego Sanchez0% (1)
- Modelamiento PilotesDocument21 pagesModelamiento PilotesWermer Melgar GutierrezNo ratings yet
- 001 - Ficha Tecnica Campo Verde IIDocument5 pages001 - Ficha Tecnica Campo Verde IIAugustoQuirozPanduroNo ratings yet
- TP FinalDocument50 pagesTP FinalFelipe Raul Chumpitaz GuevaraNo ratings yet
- Campo Gravitatorio - Problemas ResueltosDocument14 pagesCampo Gravitatorio - Problemas ResueltosCarlos Xabier100% (3)
- Closet de MaderaDocument23 pagesCloset de MaderaNarvaez CarlosNo ratings yet
- Diagramas de Conexion de Lamparas IncandescentesDocument37 pagesDiagramas de Conexion de Lamparas IncandescentesEder Galeana60% (5)
- 01 - AntiderivadaDocument14 pages01 - AntiderivadaururutsumugiyaNo ratings yet
- Empleo de Vidrio Molido en Mezcla Asfáltica en Ambientes de Altas TemperaturasDocument3 pagesEmpleo de Vidrio Molido en Mezcla Asfáltica en Ambientes de Altas TemperaturasAlexis Vladimir VilcaNo ratings yet
- TP Ed FisicaDocument4 pagesTP Ed FisicaGO PRONo ratings yet