You might also like
- Reclutamiento BriveDocument1 pageReclutamiento BriveJimmy GarciaNo ratings yet
- Diseño de Cajas AcusticasDocument33 pagesDiseño de Cajas AcusticasJunior Diaz100% (1)
- Guia Electromagnetismo PDFDocument4 pagesGuia Electromagnetismo PDFJose Juan CisnerosNo ratings yet
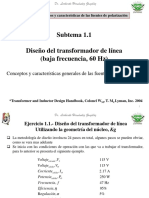
- Transformador de LineaDocument16 pagesTransformador de LineaJimmy GarciaNo ratings yet
- Equipo 3Document17 pagesEquipo 3Jimmy GarciaNo ratings yet
- ACORDEONDocument13 pagesACORDEONJimmy GarciaNo ratings yet
- Redes Opticas InteligentesDocument28 pagesRedes Opticas InteligentesJimmy GarciaNo ratings yet
- Practica LarrauriDocument3 pagesPractica LarrauriJimmy GarciaNo ratings yet
- Ejercicios ResueltosDocument2 pagesEjercicios ResueltosJimmy GarciaNo ratings yet
- Número AWGDocument2 pagesNúmero AWGJimmy GarciaNo ratings yet
- Ecua Dif8 (Primerordenoexactas)Document13 pagesEcua Dif8 (Primerordenoexactas)Jimmy GarciaNo ratings yet
- Guia de Ecuaciones DiferencialesDocument1 pageGuia de Ecuaciones DiferencialesJimmy GarciaNo ratings yet
- 02 Ecua Dif (Soluciones)Document12 pages02 Ecua Dif (Soluciones)Jimmy GarciaNo ratings yet
- Guia Preg EdoDocument4 pagesGuia Preg EdoJimmy GarciaNo ratings yet
- EXAets 4Document1 pageEXAets 4Jimmy GarciaNo ratings yet
- Definicion Clasica Ecuaciones DiferencialesDocument6 pagesDefinicion Clasica Ecuaciones DiferencialesJimmy GarciaNo ratings yet
- BORELLE13Document6 pagesBORELLE13Jimmy GarciaNo ratings yet
- Ejercicios Resueltos3Document1 pageEjercicios Resueltos3Jimmy GarciaNo ratings yet
- Ecua Dif5 (Primerordenseparables)Document17 pagesEcua Dif5 (Primerordenseparables)Jimmy GarciaNo ratings yet
- Ejercicios Resuletos de Ecuaciones DiferencialesDocument1 pageEjercicios Resuletos de Ecuaciones DiferencialesJimmy GarciaNo ratings yet
- Ecuaciones diferenciales separablesDocument2 pagesEcuaciones diferenciales separablesJimmy GarciaNo ratings yet
- 01 Ecua Dif (Defini Clasifica)Document6 pages01 Ecua Dif (Defini Clasifica)Jimmy GarciaNo ratings yet
- Modelos matemáticos con ecuaciones diferencialesDocument2 pagesModelos matemáticos con ecuaciones diferencialesJimmy Garcia50% (2)
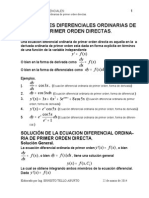
- Ecuaciones Diferenciales de Primer Orden Solucion DirectaDocument10 pagesEcuaciones Diferenciales de Primer Orden Solucion DirectaJimmy GarciaNo ratings yet
- Ecuaciones Diferenciales de Primer OrdenDocument4 pagesEcuaciones Diferenciales de Primer OrdenJimmy GarciaNo ratings yet
- Ecuaciones DiferencialesDocument2 pagesEcuaciones DiferencialesJimmy GarciaNo ratings yet
- Ecuaciones diferenciales homogéneasDocument14 pagesEcuaciones diferenciales homogéneasJimmy GarciaNo ratings yet
- MonoliticoDocument5 pagesMonoliticoJimmy GarciaNo ratings yet
- Ecua Dif3 (Primerorden)Document4 pagesEcua Dif3 (Primerorden)Jimmy GarciaNo ratings yet
- Guía 2 de Adición y Sustracción de EnterosDocument4 pagesGuía 2 de Adición y Sustracción de EnterosOscar Felipe Acevedo JimenezNo ratings yet
- Algebra IntroduccionDocument8 pagesAlgebra IntroducciongregoriofernandezNo ratings yet
- Analisis Vectorial 2 Ciencias MedicasDocument6 pagesAnalisis Vectorial 2 Ciencias MedicasRichardNo ratings yet
- Multiplicación P.D.F. Original Miss KatycitaDocument12 pagesMultiplicación P.D.F. Original Miss KatycitaJuan chumioque100% (2)
- ARITMÉTICADocument56 pagesARITMÉTICAcaroNo ratings yet
- Leyes de los signos, operaciones algebraicas y funciones racionalesDocument11 pagesLeyes de los signos, operaciones algebraicas y funciones racionalesHéctor Emanuel Martín Alcalá100% (1)
- Unidad 1 Sucesiones y SumatoriasDocument6 pagesUnidad 1 Sucesiones y Sumatoriasapi-3727143100% (3)
- Producto Punto y Producto CruzDocument11 pagesProducto Punto y Producto CruzAnonymous Vk7u89YENo ratings yet
- Calculo de ValoresDocument24 pagesCalculo de Valoresyetter moralesNo ratings yet
- Tercero ADocument354 pagesTercero AJose Llamas AragonésNo ratings yet
- G8B1C2Document7 pagesG8B1C2Maria CruzNo ratings yet
- PolinomiosDocument10 pagesPolinomiosALAN NAHEL GUERRA BUENONo ratings yet
- DIVISIBILIDADDocument13 pagesDIVISIBILIDADjruiz241564No ratings yet
- Lasmatematicasenpdf PDFDocument5 pagesLasmatematicasenpdf PDFgarbouch AbdulNo ratings yet
- Teoria de Exponentes (Precadete)Document5 pagesTeoria de Exponentes (Precadete)DaviddidNo ratings yet
- Hoja de Taller TeoríaDocument4 pagesHoja de Taller TeoríaAnderson MuñozzNo ratings yet
- Numeros Complejos, Expresiones AlgebraicasDocument8 pagesNumeros Complejos, Expresiones AlgebraicasPerla Yamil Robles ThompsonNo ratings yet
- 3 ESO 1 Numero RacionalDocument28 pages3 ESO 1 Numero RacionalGUILLERMO MINGUELANo ratings yet
- Teoría de Números (Para Principiantes) : January 2010Document304 pagesTeoría de Números (Para Principiantes) : January 2010Santiago Di Gregorio100% (1)
- Anillos y subanillosDocument89 pagesAnillos y subanillosMaría EspinalNo ratings yet
- Matemáticas I para Ingeniería Técnica IndustrialDocument180 pagesMatemáticas I para Ingeniería Técnica IndustrialMiguelmenor100% (1)
- Precatolica 2022 - Matematica - 01 Fracciones OKDocument6 pagesPrecatolica 2022 - Matematica - 01 Fracciones OKFlavia MengoaNo ratings yet
- Aritmética Elemental Teórico-Práctica para Escuelas PrimariasDocument125 pagesAritmética Elemental Teórico-Práctica para Escuelas PrimariasAngel MiguelNo ratings yet
- Algebras de Lie San MartinDocument450 pagesAlgebras de Lie San MartinMaico GouveiaNo ratings yet
- Conjuntos numéricos y teorema de PitágorasDocument7 pagesConjuntos numéricos y teorema de PitágorasAlbeiro Carrillo HernandezNo ratings yet
- Academia Trilce organiza la Olimpiada Nacional de Matemática 2018Document16 pagesAcademia Trilce organiza la Olimpiada Nacional de Matemática 2018Jonathan AngeloNo ratings yet
- Problemas de MatematicaDocument46 pagesProblemas de MatematicaAnonymous rVSaNX5llwNo ratings yet
- Organizador Gráfico Casos de FactorizaciónDocument4 pagesOrganizador Gráfico Casos de FactorizaciónBryan CalderónNo ratings yet
- GHGFHDocument3 pagesGHGFHCampos Galvez WilsonNo ratings yet
- Números Racionales Guía N° 6Document8 pagesNúmeros Racionales Guía N° 6MacarenaNo ratings yet