You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- BRKCCT-1002 Cisco Live Contact CenterDocument44 pagesBRKCCT-1002 Cisco Live Contact CenterArun GuptaNo ratings yet
- Assign#1Document2 pagesAssign#1Edrielle ValdezNo ratings yet
- Prof. Herkutanto-JKN - Patient Safety Dan Etika 2016Document30 pagesProf. Herkutanto-JKN - Patient Safety Dan Etika 2016galih wicaksonoNo ratings yet
- Summary of Change ASME 2021Document8 pagesSummary of Change ASME 2021Asep DarojatNo ratings yet
- HDR-HC1 Hc1e HC1K Hc1ek Ver.1.3 2006.07 Service Manual Suplemento 1Document8 pagesHDR-HC1 Hc1e HC1K Hc1ek Ver.1.3 2006.07 Service Manual Suplemento 1Javier GutiérrezNo ratings yet
- RFQ - Tank DemuckingDocument12 pagesRFQ - Tank Demuckingmuhamadrafie1975100% (1)
- Capitulo 9 - Flujo de DatosDocument24 pagesCapitulo 9 - Flujo de DatosOrlando Espinoza ZevallosNo ratings yet
- Sem 638 Manual de MantenimientoDocument12 pagesSem 638 Manual de MantenimientoJhon Simanca100% (1)
- 7th Sem PPT FinalDocument28 pages7th Sem PPT FinalDeepa JethvaNo ratings yet
- MDLink User Manual PDFDocument41 pagesMDLink User Manual PDFkulov1592No ratings yet
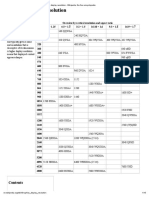
- Graphics Display Resolution - Wikipedia, The Free EncyclopediaDocument15 pagesGraphics Display Resolution - Wikipedia, The Free EncyclopediaKarun KumarNo ratings yet
- Regional VP Sales Director in USA Resume Margo PappDocument2 pagesRegional VP Sales Director in USA Resume Margo PappMargoPappNo ratings yet
- CMD LinecommandsDocument14 pagesCMD LinecommandsdesideriuNo ratings yet
- E 321 - 96 - Rtmymq - PDFDocument9 pagesE 321 - 96 - Rtmymq - PDFPrakash MakadiaNo ratings yet
- CL Fuses 8KV-15KV-23KV-38KV Data SheetDocument9 pagesCL Fuses 8KV-15KV-23KV-38KV Data SheetSamer Abdulaziz SadaqaNo ratings yet
- Training BookletDocument20 pagesTraining BookletMohamedAliJlidiNo ratings yet
- A Neural Network Model For Electric PDFDocument6 pagesA Neural Network Model For Electric PDFR Adhitya ArNo ratings yet
- 01 SQL ErrorsDocument2,085 pages01 SQL ErrorsM. temNo ratings yet
- λ-based Design Rules PDFDocument3 pagesλ-based Design Rules PDFvinosujaNo ratings yet
- Comparison Between Six-Stroke and Four-Stroke EngineDocument15 pagesComparison Between Six-Stroke and Four-Stroke EnginefaizanbasharatNo ratings yet
- Conveni Pack Technical Data (LRYCP DY1 R 407C)Document188 pagesConveni Pack Technical Data (LRYCP DY1 R 407C)HoàngViệtAnhNo ratings yet
- Fallout New OrleansDocument44 pagesFallout New Orleansender000No ratings yet
- The Miser'S T/R Loop Antenna: MiserlyDocument3 pagesThe Miser'S T/R Loop Antenna: MiserlyTariq ZuhlufNo ratings yet
- Lector: Aleksandar Karamfilov Skype: Sanders - Kar E-Mail: Aleksandar - Karamfilov@Pragmatic - BG Linkedin: 2013 - 2014Document19 pagesLector: Aleksandar Karamfilov Skype: Sanders - Kar E-Mail: Aleksandar - Karamfilov@Pragmatic - BG Linkedin: 2013 - 2014Diana DikovaNo ratings yet
- Booklet ThrusterDocument5 pagesBooklet ThrusterNeo ZaoNo ratings yet
- Case StudyDocument80 pagesCase Studybravo deltafoxNo ratings yet
- Mahindra08 Tractor 2Document5 pagesMahindra08 Tractor 2Pawan SinghNo ratings yet
- PROSIS Part Information: Date: Image Id: Catalogue: ModelDocument2 pagesPROSIS Part Information: Date: Image Id: Catalogue: ModelAMIT SINGHNo ratings yet
- Forensics Plastics and Burn TestsDocument2 pagesForensics Plastics and Burn TestsTrishaNo ratings yet
- Introduction To Ada Solo Project: Robert Rostkowski CS 460 Computer Security Fall 2008Document20 pagesIntroduction To Ada Solo Project: Robert Rostkowski CS 460 Computer Security Fall 2008anilkumar18No ratings yet