You might also like
- As Ce SettlementDocument18 pagesAs Ce SettlementJitender NaiduNo ratings yet
- R18B.TechIYearSyllabusofNon CircuitBranchesDocument31 pagesR18B.TechIYearSyllabusofNon CircuitBranchesచిమ్ముల సందీప్ రెడ్డిNo ratings yet
- Vertical Alignment - IIDocument5 pagesVertical Alignment - IImpe1No ratings yet
- Chapter 6Document8 pagesChapter 6tixy2013No ratings yet
- Hydrualics & Hydraulic Machinery - Lecture - Notes-1 PDFDocument101 pagesHydrualics & Hydraulic Machinery - Lecture - Notes-1 PDFJitender NaiduNo ratings yet
- Learning Licence Test Road-signs-EnglishDocument15 pagesLearning Licence Test Road-signs-Englishu2mailrahulNo ratings yet
- Mechanical-Engineering Gate2016.InfoDocument3 pagesMechanical-Engineering Gate2016.InfoHenryNo ratings yet
- Exercice F 7017 TDocument19 pagesExercice F 7017 TtankimsinNo ratings yet
- Te 2 Lecture Notes PDFDocument128 pagesTe 2 Lecture Notes PDFJitender NaiduNo ratings yet
- Scan Doc by CamScannerDocument1 pageScan Doc by CamScannerJitender NaiduNo ratings yet
- Solved Problems - 10 ExerciseDocument3 pagesSolved Problems - 10 ExerciseJitender NaiduNo ratings yet
- Unit 3 Airport EngineeringDocument15 pagesUnit 3 Airport EngineeringJitender NaiduNo ratings yet
- Autocad 2013 - Preguntas Más Frecuentes en InglésDocument10 pagesAutocad 2013 - Preguntas Más Frecuentes en InglésicreatiaNo ratings yet
- Role of Media in Disaster ManagementDocument13 pagesRole of Media in Disaster ManagementNik RoskimanNo ratings yet
- Computer Aided Design (CAD) : 18-1 IntroductionDocument3 pagesComputer Aided Design (CAD) : 18-1 IntroductionTayyab AwanNo ratings yet
- TSPSC Hall TicketDocument2 pagesTSPSC Hall TicketJitender NaiduNo ratings yet
- Signals: Objectives of SignallingDocument14 pagesSignals: Objectives of SignallingJitender NaiduNo ratings yet
- One Way Slab - NptelDocument25 pagesOne Way Slab - Npteljindal_bharatNo ratings yet
- Electrical Circuits AnalysisDocument12 pagesElectrical Circuits AnalysisRajesh ChinthaNo ratings yet
- DeflectionDocument22 pagesDeflectionrobertantoreniNo ratings yet
- 2 Way SlabDocument28 pages2 Way SlabGautam PaulNo ratings yet
- TheodoliteDocument36 pagesTheodolitesikandar_shah100No ratings yet
- Engineering Drawing and SketchingDocument17 pagesEngineering Drawing and SketchingJitender NaiduNo ratings yet
- Ko KP Ka PDFDocument32 pagesKo KP Ka PDFFranklin Ronaldo GintingNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- BWP Catalogo de Partes FrenosDocument508 pagesBWP Catalogo de Partes FrenosLuis HernándezNo ratings yet
- 4G33Document1 page4G33Neftali RosalesNo ratings yet
- Transportation Engineering II 1 PDFDocument2 pagesTransportation Engineering II 1 PDFENGINEERING FORUMNo ratings yet
- Manual Book Isuzu TBR E2 PDFDocument2 pagesManual Book Isuzu TBR E2 PDFYoPiNo ratings yet
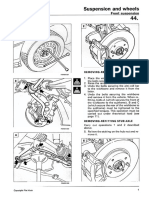
- Fiat Barchetta: Suspension and WheelsDocument17 pagesFiat Barchetta: Suspension and WheelsHallex OliveiraNo ratings yet
- Laporan MekanikDocument23 pagesLaporan MekanikNofrinto FloryNo ratings yet
- Periodic Maintenance ScheduleDocument4 pagesPeriodic Maintenance ScheduleINDIAN STUDENTSNo ratings yet
- UB1TE0E0.book operation and riding pointsDocument1 pageUB1TE0E0.book operation and riding pointsmotley crewzNo ratings yet
- Franchise 2015Document2,216 pagesFranchise 2015kgeL All DayNo ratings yet
- Digrama Completo AudiDocument30 pagesDigrama Completo AudiManuel HerediaNo ratings yet
- Fortis® H40FT, H50FT, H60FT, H70FT (L177) : 1599949 ©2009 Hyster Company 04/2009Document994 pagesFortis® H40FT, H50FT, H60FT, H70FT (L177) : 1599949 ©2009 Hyster Company 04/2009Manutenção Base AnápolisNo ratings yet
- Parking Brake System: SectionDocument10 pagesParking Brake System: SectionMaiChiVuNo ratings yet
- Orona 3G X14 EN 1510Document2 pagesOrona 3G X14 EN 1510mohammedalathwaryNo ratings yet
- Manual de Partes TerexDocument847 pagesManual de Partes TerexLuis Torres100% (1)
- Art 725Document16 pagesArt 725Lucio Hernan Puma CcanahuireNo ratings yet
- 2011-2012 Honda CR-Z Service ManualDocument2,747 pages2011-2012 Honda CR-Z Service ManualAdrian Wheldon100% (7)
- EMM 4209 - Week - 2Document39 pagesEMM 4209 - Week - 2dausNo ratings yet
- Technical ProcessDocument5 pagesTechnical Processapi-457206151No ratings yet
- Manual 120 K CatDocument727 pagesManual 120 K CatSavio Fernandes91% (44)
- UO Submission FormDocument1 pageUO Submission FormDee JoshiNo ratings yet
- Budget Unit Tracking and Maintenance ScheduleDocument2 pagesBudget Unit Tracking and Maintenance ScheduleTomi Ananda PradistyNo ratings yet
- SPAREPARTSDocument19 pagesSPAREPARTSJanrey ArcayeraNo ratings yet
- Airbus Ac A350xwb-Jun16Document386 pagesAirbus Ac A350xwb-Jun16DungLeVanNo ratings yet
- 3-DTC IndexDocument34 pages3-DTC Indexvance grayNo ratings yet
- Engine ConceptDocument64 pagesEngine ConceptAntónio FernandesNo ratings yet
- Klx110a6fa9f 99912 1300 04 PDFDocument77 pagesKlx110a6fa9f 99912 1300 04 PDFOliverNo ratings yet
- 步骤 Steps 操作 Operation methodDocument4 pages步骤 Steps 操作 Operation methodAnjum AkramNo ratings yet
- Sepulveda Pass Transit Corridor Study UpdateDocument15 pagesSepulveda Pass Transit Corridor Study UpdateMetro Los AngelesNo ratings yet
- HolleyDocument6 pagesHolleysidrivNo ratings yet
- 02 Electrical Component LocatorDocument86 pages02 Electrical Component LocatordutraneftaliNo ratings yet