You might also like
- Bariatric Robotic Surgery: A Comprehensive GuideFrom EverandBariatric Robotic Surgery: A Comprehensive GuideCarlos Eduardo DomeneNo ratings yet
- Vibration StimulationDocument6 pagesVibration StimulationMedNo ratings yet
- Secure Microprocessor-Controlled Prosthetic Leg For Elderly Amputees: Preliminary ResultsDocument15 pagesSecure Microprocessor-Controlled Prosthetic Leg For Elderly Amputees: Preliminary ResultsNada GhammemNo ratings yet
- UPPER LIMB REHABILITATION EXOSKELETONDocument6 pagesUPPER LIMB REHABILITATION EXOSKELETONTu DuongNo ratings yet
- Fall Prevention System Based On Airbag ProtectionDocument7 pagesFall Prevention System Based On Airbag ProtectionVan Pham Thi ThaoNo ratings yet
- A New Hand Exoskeleton Device For Rehabilitation Using A Three-Layered Sliding Spring Mechanism PDFDocument6 pagesA New Hand Exoskeleton Device For Rehabilitation Using A Three-Layered Sliding Spring Mechanism PDFGIenlemenNo ratings yet
- An Actuated Finger Exoskeleton For Hand Rehabilitation Following Stroke 2007Document6 pagesAn Actuated Finger Exoskeleton For Hand Rehabilitation Following Stroke 2007newkid2202No ratings yet
- Chapter One 1.0Document32 pagesChapter One 1.0Victor ImehNo ratings yet
- A Soft Wearable Robotic Ankle-Foot-Orthosis For Post-Stroke PatientsDocument6 pagesA Soft Wearable Robotic Ankle-Foot-Orthosis For Post-Stroke PatientsIsabella Garcia DiazNo ratings yet
- Abdul - Rahman - 2021 - IOP - Conf. - Ser. - Mater. - Sci. - Eng. - 1096 - 012002Document11 pagesAbdul - Rahman - 2021 - IOP - Conf. - Ser. - Mater. - Sci. - Eng. - 1096 - 012002Pul50No ratings yet
- Robot-Assisted Ankle Rehabilitation For The Treatment of Drop Foot: A Case StudyDocument5 pagesRobot-Assisted Ankle Rehabilitation For The Treatment of Drop Foot: A Case StudyIhsanNo ratings yet
- Elbow Joint Rehabilitation Device for Stroke PatientsDocument4 pagesElbow Joint Rehabilitation Device for Stroke PatientslaurentiaNo ratings yet
- Design and Testing of A Soft Parallel Robot Based On Pneumatic Artificial Muscles For Wrist RehabilitationDocument11 pagesDesign and Testing of A Soft Parallel Robot Based On Pneumatic Artificial Muscles For Wrist Rehabilitation王根萌No ratings yet
- Flex SensorDocument4 pagesFlex SensorSunitha JosephineNo ratings yet
- 1.0) Name 2.0) Project Title 3.0) Background:::: Design and Development of A Speech-Activated Bionic JointDocument6 pages1.0) Name 2.0) Project Title 3.0) Background:::: Design and Development of A Speech-Activated Bionic JointAhmed AbdulwahabNo ratings yet
- Wrist Hand OrthosisDocument7 pagesWrist Hand OrthosisKhageswar SamalNo ratings yet
- On Effective Movement in CPM For Shoulder Joint: Shota Miyaguchi, Kousei NOJIRI, Nobutomo MATSUNAGA, and Shigeyasu KAWAJIDocument5 pagesOn Effective Movement in CPM For Shoulder Joint: Shota Miyaguchi, Kousei NOJIRI, Nobutomo MATSUNAGA, and Shigeyasu KAWAJIMehdi MohammedNo ratings yet
- Performance of Cable Suspended Robots For Upper Limb RehabilitationDocument8 pagesPerformance of Cable Suspended Robots For Upper Limb RehabilitationGianni MissineoNo ratings yet
- The Development and Testing of A Human Machine Interface For A Mobile Medical ExoskeletonDocument6 pagesThe Development and Testing of A Human Machine Interface For A Mobile Medical ExoskeletonArsyad Zanadin RamadhanNo ratings yet
- Control Strategies For Hand ProsthesesDocument7 pagesControl Strategies For Hand ProsthesesamirtempsNo ratings yet
- Design_and_Evaluation_of_an_Actuated_ExoDocument31 pagesDesign_and_Evaluation_of_an_Actuated_ExoJMNo ratings yet
- 3939 Ijmme IjensDocument8 pages3939 Ijmme IjensNguyễn Xuân HoànNo ratings yet
- Wang 2008Document8 pagesWang 2008henryPPPNo ratings yet
- Ankle Rehabilitation RobotDocument10 pagesAnkle Rehabilitation Robottyh88No ratings yet
- Principles of IsokineticDocument2 pagesPrinciples of IsokineticJoe PolancoNo ratings yet
- A Lower-Limb Power-Assist RobotDocument6 pagesA Lower-Limb Power-Assist RobotAkim KbNo ratings yet
- Icorr 2005 1501051Document4 pagesIcorr 2005 1501051Amanuel TilayeNo ratings yet
- Injuries in Golf: Kristinn Heinrichs PHD, Med, BSPTDocument6 pagesInjuries in Golf: Kristinn Heinrichs PHD, Med, BSPTAna Lu LoboNo ratings yet
- Control of Lower Limb Exoskeleton For ElderlyDocument6 pagesControl of Lower Limb Exoskeleton For ElderlyAkim KbNo ratings yet
- A Novel Elbow Pneumatic Muscle Actuator For Exoskeleton Arm in Post-Stroke RehabilitationDocument6 pagesA Novel Elbow Pneumatic Muscle Actuator For Exoskeleton Arm in Post-Stroke RehabilitationSathvik BhatNo ratings yet
- Mechatronics: Junpeng Wu, Jinwu Gao, Rong Song, Rihui Li, Yaning Li, Lelun JiangDocument10 pagesMechatronics: Junpeng Wu, Jinwu Gao, Rong Song, Rihui Li, Yaning Li, Lelun JiangNguyễn Xuân HoànNo ratings yet
- PIIS2352344120300613Document5 pagesPIIS2352344120300613yu prdnyaNo ratings yet
- A Wearable Motion Capture Device Able To Detect Dynamic Motion of Human LimbsDocument12 pagesA Wearable Motion Capture Device Able To Detect Dynamic Motion of Human LimbsAhmed Gawad ElashryNo ratings yet
- 2055 2386 5 5Document5 pages2055 2386 5 5hoan leNo ratings yet
- Nexgen CR Flex and Lps FleDocument32 pagesNexgen CR Flex and Lps FleJayjeet BhoiteNo ratings yet
- Stroke ...... MMMDocument17 pagesStroke ...... MMMsara mohamedNo ratings yet
- Automation of Upper Limb Prostheses Using Shape Memory AlloysDocument8 pagesAutomation of Upper Limb Prostheses Using Shape Memory AlloysÁSädKHänNo ratings yet
- A Fuzzy C Means Clustering Approach For Gesture Recognition in HealthcareDocument8 pagesA Fuzzy C Means Clustering Approach For Gesture Recognition in HealthcarekrishnanandNo ratings yet
- A Biomechanical Analysis of Rowing (CrossFit Journal)Document7 pagesA Biomechanical Analysis of Rowing (CrossFit Journal)AnaNo ratings yet
- Igmokoo 2007Document6 pagesIgmokoo 2007kurts010No ratings yet
- Development of 2-DOF Powered Exoskeleton For Upper Limb RehabilitationDocument2 pagesDevelopment of 2-DOF Powered Exoskeleton For Upper Limb RehabilitationWarnithaNo ratings yet
- Technical DescriptionDocument6 pagesTechnical DescriptionMatt LawallNo ratings yet
- Smooth and Continuous Human Gait Phase Detection Based On Foot Pressure PatternsDocument6 pagesSmooth and Continuous Human Gait Phase Detection Based On Foot Pressure PatternsArati ChavanNo ratings yet
- Gait Cycle Analysis Through Kinectand Stationary Wavelet TransformDocument7 pagesGait Cycle Analysis Through Kinectand Stationary Wavelet TransformEdgar Romeo Pauta LópezNo ratings yet
- Smart Growing Rod For Early-Onset Scoliosis: Osama Abolaeha, Huthaifa Al - Issa, and Ali ZayedDocument7 pagesSmart Growing Rod For Early-Onset Scoliosis: Osama Abolaeha, Huthaifa Al - Issa, and Ali ZayedfajarvicNo ratings yet
- Design and Control of A Parallel Robot For Ankle RehabilitationDocument14 pagesDesign and Control of A Parallel Robot For Ankle RehabilitationSushi RollNo ratings yet
- Requirements OF: RobotsDocument5 pagesRequirements OF: RobotsPaul BlcNo ratings yet
- Kinematics and Kinetics of Gait: From Lab To Clinic: Clinics in Sports Medicine July 2010Document20 pagesKinematics and Kinetics of Gait: From Lab To Clinic: Clinics in Sports Medicine July 2010Sanhita SenguptaNo ratings yet
- 4144-Article Text-10982-1-10-20180531Document6 pages4144-Article Text-10982-1-10-20180531Lim chee chinNo ratings yet
- Prosthetic DevicesDocument40 pagesProsthetic DevicesRania ANo ratings yet
- Robotic Orthosis Lokomat A Rehabilitation and Research ToolDocument8 pagesRobotic Orthosis Lokomat A Rehabilitation and Research ToolGabby RojasNo ratings yet
- Design of A Wearable Perturbator For Human KneeDocument6 pagesDesign of A Wearable Perturbator For Human KneeYuNo ratings yet
- RoboticsDocument29 pagesRoboticsnorshadiaNo ratings yet
- Design and Control of An Active Knee Orthosis Driven by A Rotary Series PDFDocument12 pagesDesign and Control of An Active Knee Orthosis Driven by A Rotary Series PDFInto The MazeNo ratings yet
- Conference PaperDocument10 pagesConference PaperYasya Khalif Perdana SalehNo ratings yet
- Development of A Soft Robotic Shoulder Assistive Device For Shoulder AbductionDocument5 pagesDevelopment of A Soft Robotic Shoulder Assistive Device For Shoulder AbductionAlemeNo ratings yet
- Research Article: Pilot Study of A Powered Exoskeleton For Upper Limb Rehabilitation Based On The WheelchairDocument12 pagesResearch Article: Pilot Study of A Powered Exoskeleton For Upper Limb Rehabilitation Based On The WheelchairCostinel BogheanuNo ratings yet
- Lowerbody Mathematical Model PDFDocument15 pagesLowerbody Mathematical Model PDFKaviraj SenguntharNo ratings yet
- Human Posture Alert Jacket ThesisDocument43 pagesHuman Posture Alert Jacket ThesisHamzaNo ratings yet
- Tracking Human Body Parts Using Particle Filters Constrained by Human BiomechanicsDocument10 pagesTracking Human Body Parts Using Particle Filters Constrained by Human BiomechanicsHamid ShayeghNo ratings yet
- Solution 2Document5 pagesSolution 2Paulina MarquezNo ratings yet
- Adaptation of Multijoint Coordination During Standing Balance in Healthy Young and Healthy Old IndividualsDocument14 pagesAdaptation of Multijoint Coordination During Standing Balance in Healthy Young and Healthy Old IndividualsebrahimpanNo ratings yet
- Models For DC MotorsDocument8 pagesModels For DC MotorsebrahimpanNo ratings yet
- Sensors: Adaptive PIF Control For Permanent Magnet Synchronous Motors Based On GPCDocument18 pagesSensors: Adaptive PIF Control For Permanent Magnet Synchronous Motors Based On GPCebrahimpanNo ratings yet
- A Review of The Use of Electro-Motor Stimulation in Human MusclesDocument13 pagesA Review of The Use of Electro-Motor Stimulation in Human MusclesebrahimpanNo ratings yet
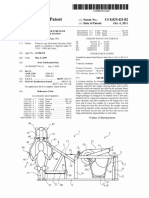
- United States Patent (10) Patent N6 US 8,029,424 B2: Thulin 45 Date of Patent: Oct. 4 2011Document15 pagesUnited States Patent (10) Patent N6 US 8,029,424 B2: Thulin 45 Date of Patent: Oct. 4 2011ebrahimpanNo ratings yet
- Open Sim Tutorial 1Document10 pagesOpen Sim Tutorial 1Rayanne FlorianoNo ratings yet
- DC motor dynamic modeling and control techniquesDocument23 pagesDC motor dynamic modeling and control techniquesKaderNo ratings yet
- Open Sim Tutorial 1Document10 pagesOpen Sim Tutorial 1Rayanne FlorianoNo ratings yet
- Design and Implementation of A Distributed Variable Impedance Actuator Using Parallel Linear SpringsDocument12 pagesDesign and Implementation of A Distributed Variable Impedance Actuator Using Parallel Linear SpringsebrahimpanNo ratings yet
- Yjmt 23 188Document9 pagesYjmt 23 188ebrahimpanNo ratings yet
- A Review of The Clinical Value of Isolated Lumbar Extension Resistance Training For Chronic Low Back PainDocument19 pagesA Review of The Clinical Value of Isolated Lumbar Extension Resistance Training For Chronic Low Back PainebrahimpanNo ratings yet
- c3d2OpenSim TutorialDocument8 pagesc3d2OpenSim Tutorialebrahimpan100% (1)
- Mechatronics: Haoyong Yu, Sunan Huang, Gong Chen, Nitish ThakorDocument12 pagesMechatronics: Haoyong Yu, Sunan Huang, Gong Chen, Nitish ThakorebrahimpanNo ratings yet
- I6 BrochureDocument2 pagesI6 BrochureebrahimpanNo ratings yet
- Adaptation of Multijoint Coordination During Standing Balance in Healthy Young and Healthy Old IndividualsDocument14 pagesAdaptation of Multijoint Coordination During Standing Balance in Healthy Young and Healthy Old IndividualsebrahimpanNo ratings yet
- 100720141556121410000Document6 pages100720141556121410000ebrahimpanNo ratings yet
- Three-Dimensional Joint Reaction Forces and Moments at The Low Ba PDFDocument9 pagesThree-Dimensional Joint Reaction Forces and Moments at The Low Ba PDFebrahimpanNo ratings yet
- 100720141556121410000Document6 pages100720141556121410000ebrahimpanNo ratings yet
- Supported Contact Mechanics ModelsDocument8 pagesSupported Contact Mechanics ModelsebrahimpanNo ratings yet
- Spring Over Muscle (SOM) Actuator For Rehabilitation DevicesDocument4 pagesSpring Over Muscle (SOM) Actuator For Rehabilitation DevicesebrahimpanNo ratings yet
- An Assisted Waist Supporter For Vertebral RehabilitationDocument2 pagesAn Assisted Waist Supporter For Vertebral RehabilitationebrahimpanNo ratings yet
- Hasegawa 1985Document6 pagesHasegawa 1985ebrahimpanNo ratings yet
- Mca 21 00016 v2 PDFDocument15 pagesMca 21 00016 v2 PDFebrahimpanNo ratings yet
- Viscoelasticity - RheologicalDocument10 pagesViscoelasticity - RheologicalsaltyNo ratings yet
- Strain CylindricalDocument4 pagesStrain CylindricalebrahimpanNo ratings yet
- Elastic Constitutive EquationsDocument46 pagesElastic Constitutive EquationsAmithkumar R AchariNo ratings yet
- Plane Strain Problems of Transversely Isotropic Thermoelastic MediaDocument15 pagesPlane Strain Problems of Transversely Isotropic Thermoelastic MediaebrahimpanNo ratings yet
- Hasegawa 1985Document6 pagesHasegawa 1985ebrahimpanNo ratings yet
- Detect Plant Diseases Using Image ProcessingDocument11 pagesDetect Plant Diseases Using Image Processingvinayak100% (1)
- Overhead Water Tank Structural AnalysisDocument28 pagesOverhead Water Tank Structural Analysiscollins unanka100% (3)
- Company Profile HighlightsDocument7 pagesCompany Profile HighlightsRaynald HendartoNo ratings yet
- Measuring Algorithm Efficiency Using Time and Space ComplexityDocument8 pagesMeasuring Algorithm Efficiency Using Time and Space ComplexityGovind RathoreNo ratings yet
- Click To Edit Master Title Style: Uggas, Heinz Gerhard A. Sabroso, Dionisio Jr. L. Reyes, Jeboy ODocument21 pagesClick To Edit Master Title Style: Uggas, Heinz Gerhard A. Sabroso, Dionisio Jr. L. Reyes, Jeboy ODionisio SabrosoNo ratings yet
- Radiograph Evaluation ChecklistDocument2 pagesRadiograph Evaluation ChecklistZulfadli Haron100% (1)
- 6 Main Rotor Config DesignDocument44 pages6 Main Rotor Config DesignDeepak Paul TirkeyNo ratings yet
- Reflecting on UPHSD's Mission, Vision, and Core ValuesDocument3 pagesReflecting on UPHSD's Mission, Vision, and Core ValuesBia N Cz100% (1)
- Campbell Soup Case-StudyDocument3 pagesCampbell Soup Case-StudyraghudeepaNo ratings yet
- Operation 490BDocument60 pagesOperation 490BYe Min Htike100% (1)
- Vega Plus 69Document3 pagesVega Plus 69yashNo ratings yet
- Investigation of Twilight Using Sky Quality Meter For Isha' Prayer TimeDocument1 pageInvestigation of Twilight Using Sky Quality Meter For Isha' Prayer Timeresurgam52No ratings yet
- Syllabus Agri 2015Document248 pagesSyllabus Agri 2015parvathivignesh279No ratings yet
- Documentation For UStarDocument26 pagesDocumentation For UStarthunder77No ratings yet
- Phenomenal Consciousness and Cognitive Access: ResearchDocument6 pagesPhenomenal Consciousness and Cognitive Access: ResearchAyşeNo ratings yet
- Dball-Gm5 en Ig Cp20110328aDocument18 pagesDball-Gm5 en Ig Cp20110328aMichael MartinezNo ratings yet
- Country Wing Auto-Mobile GarageDocument25 pagesCountry Wing Auto-Mobile GarageDmitry PigulNo ratings yet
- ERC12864-12 DemoCode 4wire SPI 2Document18 pagesERC12864-12 DemoCode 4wire SPI 2DVTNo ratings yet
- Senior Design Projects 201-2020 - For Website - MEDocument5 pagesSenior Design Projects 201-2020 - For Website - MEYujbvhujgNo ratings yet
- Packing, Transportation and Marketing of Ornamental FishesDocument16 pagesPacking, Transportation and Marketing of Ornamental Fishesraj kiranNo ratings yet
- Proposed - TIA - 1392 - NFPA - 221Document2 pagesProposed - TIA - 1392 - NFPA - 221Junior TorrejónNo ratings yet
- Amber ToolsDocument309 pagesAmber ToolshkmydreamsNo ratings yet
- Astm A105, A105mDocument5 pagesAstm A105, A105mMike Dukas0% (1)
- RB450G Trouble ShootingDocument9 pagesRB450G Trouble Shootingjocimar1000No ratings yet
- CHM 127 Exp 1Document4 pagesCHM 127 Exp 1shelby hartwigNo ratings yet
- Demand Performa For Annual DemandDocument10 pagesDemand Performa For Annual DemandpushpNo ratings yet
- 9-Lesson 5 Direct and Indirect SpeechDocument8 pages9-Lesson 5 Direct and Indirect Speechlaiwelyn100% (4)
- E 74 - 06 - For Force Measuring InstrumentsDocument12 pagesE 74 - 06 - For Force Measuring InstrumentsSarvesh MishraNo ratings yet
- Giraffe Juice GamesDocument32 pagesGiraffe Juice Gamesgwyn022100% (3)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (542)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsFrom EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsRating: 4 out of 5 stars4/5 (1)
- The Rare Metals War: the dark side of clean energy and digital technologiesFrom EverandThe Rare Metals War: the dark side of clean energy and digital technologiesRating: 5 out of 5 stars5/5 (2)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingFrom EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingRating: 4 out of 5 stars4/5 (1)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemFrom EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNo ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)
- Understanding Automotive Electronics: An Engineering PerspectiveFrom EverandUnderstanding Automotive Electronics: An Engineering PerspectiveRating: 3.5 out of 5 stars3.5/5 (16)
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsFrom EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsRating: 5 out of 5 stars5/5 (2)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowFrom EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowNo ratings yet
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- Build Your Own Electric Vehicle, Third EditionFrom EverandBuild Your Own Electric Vehicle, Third EditionRating: 4.5 out of 5 stars4.5/5 (3)
- The Graphene Revolution: The Weird Science of the Ultra-thinFrom EverandThe Graphene Revolution: The Weird Science of the Ultra-thinRating: 4.5 out of 5 stars4.5/5 (4)
- Beginner's Guide to Reading Schematics, Fourth EditionFrom EverandBeginner's Guide to Reading Schematics, Fourth EditionRating: 3.5 out of 5 stars3.5/5 (10)
- Operational Amplifier Circuits: Analysis and DesignFrom EverandOperational Amplifier Circuits: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (2)
- Digital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsFrom EverandDigital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsRating: 5 out of 5 stars5/5 (3)
- Electrical Principles and Technology for EngineeringFrom EverandElectrical Principles and Technology for EngineeringRating: 4 out of 5 stars4/5 (4)