You might also like
- Growing Up Psychic by Chip Coffey - ExcerptDocument48 pagesGrowing Up Psychic by Chip Coffey - ExcerptCrown Publishing Group100% (1)
- C1 Reading 1Document2 pagesC1 Reading 1Alejandros BrosNo ratings yet
- Servo Magazine 01 2005Document84 pagesServo Magazine 01 2005dangtq8467% (3)
- Pengenalan Icd-10 Struktur & IsiDocument16 pagesPengenalan Icd-10 Struktur & IsirsudpwslampungNo ratings yet
- Navier-Stokes EquationsDocument395 pagesNavier-Stokes EquationsBouhadjar Meguenni100% (7)
- Appointment Letter JobDocument30 pagesAppointment Letter JobsalmanNo ratings yet
- Clinic Management System (24 PGS)Document24 pagesClinic Management System (24 PGS)pranithNo ratings yet
- 8 DaysDocument337 pages8 Daysprakab100% (1)
- Phase Domain Modelling of Frequency Dependent Transmission Lines by Means of An Arma ModelDocument11 pagesPhase Domain Modelling of Frequency Dependent Transmission Lines by Means of An Arma ModelMadhusudhan SrinivasanNo ratings yet
- 18.S096: Homework Problem Set 1 (Revised) : Topics in Mathematics of Data Science (Fall 2015) Afonso S. BandeiraDocument6 pages18.S096: Homework Problem Set 1 (Revised) : Topics in Mathematics of Data Science (Fall 2015) Afonso S. BandeiraAbdelrhman ShoeebNo ratings yet
- 05.2 PP 15 29 Wigner Ensemble and Semi-Circle LawDocument15 pages05.2 PP 15 29 Wigner Ensemble and Semi-Circle Lawqwsx098No ratings yet
- Metrics and Statistics: Calculating Distances and VariancesDocument5 pagesMetrics and Statistics: Calculating Distances and VariancesmauricioesguerraNo ratings yet
- Mathematics For Economics and Finance: Answer Key To Final ExamDocument14 pagesMathematics For Economics and Finance: Answer Key To Final ExamjeanboncruNo ratings yet
- Problems Set 1Document6 pagesProblems Set 1SIDRA ALI MA ECO DEL 2021-23No ratings yet
- On Deep Learning As A Remedy For The Curse of Dimensionality in Nonparametric RegressionDocument25 pagesOn Deep Learning As A Remedy For The Curse of Dimensionality in Nonparametric RegressionQardawi HamzahNo ratings yet
- Handout For Chapters 1-3 of Bouchaud: 1 DenitionsDocument10 pagesHandout For Chapters 1-3 of Bouchaud: 1 DenitionsStefano DucaNo ratings yet
- Lecture24May3Document16 pagesLecture24May3Naresh KumarNo ratings yet
- The Transformer Model in Equations: A Concise Mathematical DefinitionDocument5 pagesThe Transformer Model in Equations: A Concise Mathematical DefinitionCristian RodriguezNo ratings yet
- Limiting Behavior of Solutions of Subelliptic Heat Equations - Federica DRAGONIDocument13 pagesLimiting Behavior of Solutions of Subelliptic Heat Equations - Federica DRAGONIJefferson Johannes Roth FilhoNo ratings yet
- International Journal of C 2004 Institute For Scientific Numerical Analysis and Modeling, Series B Computing and InformationDocument10 pagesInternational Journal of C 2004 Institute For Scientific Numerical Analysis and Modeling, Series B Computing and InformationFrontiersNo ratings yet
- Solving an inverse problem for the wave equation using a minimization algorithmDocument22 pagesSolving an inverse problem for the wave equation using a minimization algorithmdeiveegan1No ratings yet
- STAT0009 Introductory NotesDocument4 pagesSTAT0009 Introductory NotesMusa AsadNo ratings yet
- Moments and Centers of Mass - Mathematics LibreText2sDocument4 pagesMoments and Centers of Mass - Mathematics LibreText2slundingNo ratings yet
- Testing The Number of Parameters of Multidimensional MLPDocument8 pagesTesting The Number of Parameters of Multidimensional MLPGalina AlexeevaNo ratings yet
- Glasnik Matemati CKI Vol. 53 (73) (2018), 343 - 357Document15 pagesGlasnik Matemati CKI Vol. 53 (73) (2018), 343 - 357Abdellah LAHDILINo ratings yet
- The Annals of Statistics 10.1214/12-AOS1003 Institute of Mathematical StatisticsDocument36 pagesThe Annals of Statistics 10.1214/12-AOS1003 Institute of Mathematical Statisticsaskazy007No ratings yet
- MIT QM Chap 01 PDFDocument26 pagesMIT QM Chap 01 PDFSergio Aguilera ChecoNo ratings yet
- GSAC Colloquium: Can You Hear the Shape of a ManifoldDocument44 pagesGSAC Colloquium: Can You Hear the Shape of a ManifoldzazarNo ratings yet
- Metode Deret PDFDocument80 pagesMetode Deret PDFDio D SaputraNo ratings yet
- MIT8 05F13 Chap 01 PDFDocument26 pagesMIT8 05F13 Chap 01 PDFKamilNo ratings yet
- Stochastic DynamicsDocument72 pagesStochastic DynamicsNolan LuNo ratings yet
- Yimin Xiao (2005) Properties of Local Nondeterinism of Gaussian Ans Stable Random Fields and Their ApplicationsDocument33 pagesYimin Xiao (2005) Properties of Local Nondeterinism of Gaussian Ans Stable Random Fields and Their ApplicationsJhonWaker2012No ratings yet
- Laplacian and Brownian Motion On Positive Definit 2023 Statistics ProbabilDocument8 pagesLaplacian and Brownian Motion On Positive Definit 2023 Statistics Probabilpepito perezNo ratings yet
- Probability DistributionsDocument3 pagesProbability DistributionsChandrani BasuNo ratings yet
- Modelling PDEs for Gravitation and Fluid MechanicsDocument41 pagesModelling PDEs for Gravitation and Fluid MechanicsmziousNo ratings yet
- Series Solutions of Second Order Linear EquationsDocument22 pagesSeries Solutions of Second Order Linear EquationsMohNajiNo ratings yet
- Ward NotesDocument101 pagesWard NotesCesare AngeliNo ratings yet
- Distribution of Maximum and Minimum of Random Number of VariablesDocument17 pagesDistribution of Maximum and Minimum of Random Number of VariablesYojan SarkarNo ratings yet
- Solving ODE Using SeriesDocument44 pagesSolving ODE Using SeriesMaulana ArifNo ratings yet
- 1 Metrics IntroDocument5 pages1 Metrics IntroDmitri ZaitsevNo ratings yet
- Vito CruzDocument10 pagesVito CruzWalter Andrés Páez GaviriaNo ratings yet
- Andreev ReflectionDocument20 pagesAndreev ReflectionEakkarat PattNo ratings yet
- On a mixed arithmetic-geometric mean inequalityDocument6 pagesOn a mixed arithmetic-geometric mean inequalityMelek GüngörNo ratings yet
- Math 599 Contact Geometry NotesDocument59 pagesMath 599 Contact Geometry Notessprite2lNo ratings yet
- Ward - Mayank Pandey RadziwillDocument13 pagesWard - Mayank Pandey RadziwillSwarup GhoshNo ratings yet
- The Q-Exponentials Do Not Maximize The Rényi EntropyDocument12 pagesThe Q-Exponentials Do Not Maximize The Rényi EntropyKosKal89No ratings yet
- University College London Department of Physics and AstronomyDocument1 pageUniversity College London Department of Physics and AstronomyRoy VeseyNo ratings yet
- 09 Aop456Document29 pages09 Aop456walter huNo ratings yet
- Entropy 20 00182Document20 pagesEntropy 20 00182chang lichangNo ratings yet
- Finite To Infinite Steady State Solutions, Bifurcations of An Integro-Differential EquationDocument15 pagesFinite To Infinite Steady State Solutions, Bifurcations of An Integro-Differential EquationRahul JoshiNo ratings yet
- Solution of Differential EquationsDocument34 pagesSolution of Differential Equationspja752No ratings yet
- Equadiff 10-2001-2 17Document11 pagesEquadiff 10-2001-2 17Alexei Navarro De CanalesNo ratings yet
- Metric Spaces, Topology, and ContinuityDocument21 pagesMetric Spaces, Topology, and ContinuitymauropenagosNo ratings yet
- Lagrange PointsDocument4 pagesLagrange Pointsjas dwanNo ratings yet
- Dajczer 1989Document13 pagesDajczer 1989Mohammed AbdelmalekNo ratings yet
- Lectures 20Document82 pagesLectures 20sudhansh kumarNo ratings yet
- 2006 Jessen - Mikosch Regularly Varying FunctionsDocument22 pages2006 Jessen - Mikosch Regularly Varying FunctionsJonas SprindysNo ratings yet
- Darcy's law in 1D porous medium flowDocument13 pagesDarcy's law in 1D porous medium flowArnurNo ratings yet
- On Marginal Allocation KTHDocument7 pagesOn Marginal Allocation KTHJohnny OnthespotNo ratings yet
- Solution of Differential EquationsDocument34 pagesSolution of Differential EquationsSaddie SoulaNo ratings yet
- Lecture 24Document9 pagesLecture 24Kenya LevyNo ratings yet
- A Note For Hybrid Bollinger Bands: Jungsoo RheeDocument6 pagesA Note For Hybrid Bollinger Bands: Jungsoo RheeCarlos EduardoNo ratings yet
- Lecture 6Document28 pagesLecture 6Jarom SaavedraNo ratings yet
- (Final)Document6 pages(Final)jeremia yusNo ratings yet
- Discrete Metric SpaceDocument3 pagesDiscrete Metric SpaceMiliyon TilahunNo ratings yet
- Power SeriesDocument2 pagesPower SeriesAbhi DebNo ratings yet
- BessonoDocument12 pagesBessonoAYmen BaltyNo ratings yet
- Time Evolution of Normalized Wave Function: Lecture Notes: QM 02Document5 pagesTime Evolution of Normalized Wave Function: Lecture Notes: QM 02Anum Hosen ShawonNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- A Hypothesis Is Never Proven Correct, Nor Is A Theory Ever Proven To Be TrueDocument3 pagesA Hypothesis Is Never Proven Correct, Nor Is A Theory Ever Proven To Be TrueGalina AlexeevaNo ratings yet
- A Comparative Study of Content and ContextDocument5 pagesA Comparative Study of Content and ContextGalina AlexeevaNo ratings yet
- 0802 0691 PDFDocument21 pages0802 0691 PDFGalina AlexeevaNo ratings yet
- Covariance Estimation For Multivariate Conditionally Gaussian Dynamic Linear ModelsDocument21 pagesCovariance Estimation For Multivariate Conditionally Gaussian Dynamic Linear ModelsGalina AlexeevaNo ratings yet
- Testing The Number of Parameters of Multidimensional MLPDocument8 pagesTesting The Number of Parameters of Multidimensional MLPGalina AlexeevaNo ratings yet
- 0802 0069Document27 pages0802 0069Galina AlexeevaNo ratings yet
- 0802 2643Document21 pages0802 2643Galina AlexeevaNo ratings yet
- Technical Report 73 IMSV, University of Bern Adaptive Confidence Sets For The Optimal Approximating ModelDocument31 pagesTechnical Report 73 IMSV, University of Bern Adaptive Confidence Sets For The Optimal Approximating ModelGalina AlexeevaNo ratings yet
- Kernel regression uniform rate estimation for censored data under α-mixing conditionDocument18 pagesKernel regression uniform rate estimation for censored data under α-mixing conditionGalina AlexeevaNo ratings yet
- Weak Convergence of The Supremum Distance For Supersmooth Kernel DeconvolutionDocument12 pagesWeak Convergence of The Supremum Distance For Supersmooth Kernel DeconvolutionGalina AlexeevaNo ratings yet
- Posterior Mean and Variance Approximation For Regression and Time Series ProblemsDocument25 pagesPosterior Mean and Variance Approximation For Regression and Time Series ProblemsGalina AlexeevaNo ratings yet
- 0802 0218 PDFDocument19 pages0802 0218 PDFGalina AlexeevaNo ratings yet
- Quantification of Speech Rhythm in Canadian French in A Minority SettingDocument42 pagesQuantification of Speech Rhythm in Canadian French in A Minority SettingGalina AlexeevaNo ratings yet
- Cholerae.: The Annals of Applied Statistics 10.1214/08-AOAS201 Institute of Mathematical StatisticsDocument32 pagesCholerae.: The Annals of Applied Statistics 10.1214/08-AOAS201 Institute of Mathematical StatisticsGalina AlexeevaNo ratings yet
- 08 KovatchevaDocument26 pages08 KovatchevaGalina AlexeevaNo ratings yet
- Methods and Objectives in Contemporary Dialectology: Benedikt SzmrecsanyiDocument12 pagesMethods and Objectives in Contemporary Dialectology: Benedikt SzmrecsanyiGalina AlexeevaNo ratings yet
- 20 D 0Document14 pages20 D 0Galina AlexeevaNo ratings yet
- Differential Object Marking: Gergely KamperDocument19 pagesDifferential Object Marking: Gergely KamperLucasNo ratings yet
- Collaborative Semantic Editing of Linked Data Lexica: John Mccrae, Elena Montiel-Ponsoda, Philipp CimianoDocument7 pagesCollaborative Semantic Editing of Linked Data Lexica: John Mccrae, Elena Montiel-Ponsoda, Philipp CimianoGalina AlexeevaNo ratings yet
- Edward R Tufte - The Information Man'Document4 pagesEdward R Tufte - The Information Man'Galina AlexeevaNo ratings yet
- 856 PaperDocument5 pages856 PaperGalina AlexeevaNo ratings yet
- 1508 07909Document11 pages1508 07909Galina AlexeevaNo ratings yet
- SubEthaEditDocument35 pagesSubEthaEditGalina AlexeevaNo ratings yet
- 1701 05923Document5 pages1701 05923Galina AlexeevaNo ratings yet
- 37195Document9 pages37195Galina AlexeevaNo ratings yet
- Szmrecsanyi 9999draft Methods Objectives Dialectology PDFDocument9 pagesSzmrecsanyi 9999draft Methods Objectives Dialectology PDFGalina AlexeevaNo ratings yet
- Predicting Target Language CCG Supertags Improves Neural Machine TranslationDocument12 pagesPredicting Target Language CCG Supertags Improves Neural Machine TranslationGalina AlexeevaNo ratings yet
- Statistics PDFDocument236 pagesStatistics PDFGalina AlexeevaNo ratings yet
- Still Mirative After All These Years PDFDocument36 pagesStill Mirative After All These Years PDFGalina AlexeevaNo ratings yet
- Assignment2-9509Document5 pagesAssignment2-9509ritadhikarycseNo ratings yet
- JHS SLM 1 Q2 Math Grade 10 32pagesDocument32 pagesJHS SLM 1 Q2 Math Grade 10 32pagesAngel Naiza JimenezNo ratings yet
- Tamil Literary Garden 2010 Lifetime Achievement Award CeremonyDocument20 pagesTamil Literary Garden 2010 Lifetime Achievement Award CeremonyAnthony VimalNo ratings yet
- 62046PSYCHICSDocument1 page62046PSYCHICSs0hpokc310No ratings yet
- Manual For The MCPL Programming LanguageDocument74 pagesManual For The MCPL Programming Languagechri1753No ratings yet
- Carnot CycleDocument3 pagesCarnot CyclealexontingNo ratings yet
- Vocabulary Prefixes ExercisesDocument2 pagesVocabulary Prefixes ExercisesMarina García CarrascoNo ratings yet
- Dimensioning GuidelinesDocument1 pageDimensioning GuidelinesNabeela TunisNo ratings yet
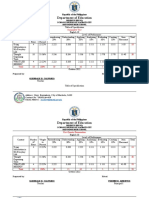
- Table of Specification ENGLISHDocument2 pagesTable of Specification ENGLISHDonn Abel Aguilar IsturisNo ratings yet
- Blank Character StatsDocument19 pagesBlank Character Stats0114paolNo ratings yet
- Learn Six Sigma Process and Methodology BasicsDocument4 pagesLearn Six Sigma Process and Methodology BasicsGeorge MarkasNo ratings yet
- Propaganda and Counterpropaganda in Film, 1933-1945: Retrospective of The 1972 ViennaleDocument16 pagesPropaganda and Counterpropaganda in Film, 1933-1945: Retrospective of The 1972 ViennaleDanWDurningNo ratings yet
- 7 JitDocument36 pages7 JitFatima AsadNo ratings yet
- Gpredict User Manual 1.2Document64 pagesGpredict User Manual 1.2Will JacksonNo ratings yet
- Cost of Litigation Report (2015)Document17 pagesCost of Litigation Report (2015)GlennKesslerWPNo ratings yet
- Identifying Research ProblemsDocument29 pagesIdentifying Research ProblemsEdel Borden PaclianNo ratings yet
- Philippine Development Plan (Optimized)Document413 pagesPhilippine Development Plan (Optimized)herbertjohn24No ratings yet
- C code snippets with answersDocument14 pagesC code snippets with answersqwerty6327No ratings yet
- Pedestrian Safety in Road TrafficDocument9 pagesPedestrian Safety in Road TrafficMaxamed YusufNo ratings yet
- Materi Green SCMDocument38 pagesMateri Green SCManandaailanthusNo ratings yet
- Configuring Nagios On Client For OSSIMDocument10 pagesConfiguring Nagios On Client For OSSIMMaixender NganareNo ratings yet