You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Original Lists of Persons of Quality Emigrants Religious Exiles Political Rebels Serving Men Sold For A Term of Years Apprentices Children Stolen Maidens Pressed and OthersDocument609 pagesThe Original Lists of Persons of Quality Emigrants Religious Exiles Political Rebels Serving Men Sold For A Term of Years Apprentices Children Stolen Maidens Pressed and OthersShakir Daddy-Phatstacks Cannon100% (1)
- Electronic Fuel Control SystemDocument9 pagesElectronic Fuel Control SystemRajeevReddyNareddula75% (4)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Employee of The Month.Document2 pagesEmployee of The Month.munyekiNo ratings yet
- Post Renaissance Architecture in EuropeDocument10 pagesPost Renaissance Architecture in Europekali_007No ratings yet
- Partnership Digest Obillos Vs CIRDocument2 pagesPartnership Digest Obillos Vs CIRJeff Cadiogan Obar100% (9)
- TechBridge TCP ServiceNow Business Case - Group 6Document9 pagesTechBridge TCP ServiceNow Business Case - Group 6Takiyah Shealy100% (1)
- Painters Rates PDFDocument86 pagesPainters Rates PDFmanthoexNo ratings yet
- Book Title: A Book Proposal ForDocument56 pagesBook Title: A Book Proposal ForRajeevReddyNareddulaNo ratings yet
- Unit-Iv: The Basics of Electronic Engine ControlDocument22 pagesUnit-Iv: The Basics of Electronic Engine ControlRajeevReddyNareddulaNo ratings yet
- Mini Project DocumentationDocument28 pagesMini Project DocumentationRajeevReddyNareddulaNo ratings yet
- 3 - Organization of Intel 8086Document10 pages3 - Organization of Intel 8086linhanumaNo ratings yet
- Electronics Question BankDocument9 pagesElectronics Question BankHoney SriNo ratings yet
- QCA Based Area Efficient B2G & G2B Code ConvertersDocument11 pagesQCA Based Area Efficient B2G & G2B Code ConvertersRajeevReddyNareddulaNo ratings yet
- Electronics Question BankDocument9 pagesElectronics Question BankHoney SriNo ratings yet
- SP English PDFDocument4 pagesSP English PDFRohit GandhiNo ratings yet
- Advanced ProjectDocument8 pagesAdvanced ProjectRajeevReddyNareddulaNo ratings yet
- Electronics and Semiconductor Question BankDocument3 pagesElectronics and Semiconductor Question BanksidNo ratings yet
- Technical FormulaesDocument3 pagesTechnical FormulaesRajatSharmaNo ratings yet
- InternetofthingsDocument37 pagesInternetofthingskalyanvarmak5887No ratings yet
- Emi ImpDocument2 pagesEmi ImpRajeevReddyNareddulaNo ratings yet
- SP English PDFDocument4 pagesSP English PDFRohit GandhiNo ratings yet
- Gate Forum Ec Gate 2016 Set 2Document29 pagesGate Forum Ec Gate 2016 Set 2RajeevReddyNareddulaNo ratings yet
- Gate Forum Ec Gate 2016 Set 3Document32 pagesGate Forum Ec Gate 2016 Set 3RajeevReddyNareddulaNo ratings yet
- Physical Layer Basicmac Layer MechanismsDocument1 pagePhysical Layer Basicmac Layer MechanismsRajeevReddyNareddulaNo ratings yet
- GATE Forum EC GATE 2016 Set 1Document29 pagesGATE Forum EC GATE 2016 Set 1RajeevReddyNareddulaNo ratings yet
- An Intelligent Universal Remote Control SystemDocument9 pagesAn Intelligent Universal Remote Control SystemRajeevReddyNareddulaNo ratings yet
- Advanced Project Patan SirDocument12 pagesAdvanced Project Patan SirRajeevReddyNareddulaNo ratings yet
- MCQ PhysicsDocument44 pagesMCQ PhysicsRajeevReddyNareddulaNo ratings yet
- Acc RoboticsDocument2 pagesAcc RoboticsRajeevReddyNareddulaNo ratings yet
- C ProgramingDocument2 pagesC ProgramingRajeevReddyNareddulaNo ratings yet
- C ProgramingDocument2 pagesC ProgramingRajeevReddyNareddulaNo ratings yet
- 2-4 de Multiplexer HDL Code PDFDocument1 page2-4 de Multiplexer HDL Code PDFRajeevReddyNareddulaNo ratings yet
- C ProgramingDocument2 pagesC ProgramingRajeevReddyNareddulaNo ratings yet
- C ProgramingDocument2 pagesC ProgramingRajeevReddyNareddulaNo ratings yet
- C ProgramingDocument2 pagesC ProgramingRajeevReddyNareddulaNo ratings yet
- 5045.CHUYÊN ĐỀDocument8 pages5045.CHUYÊN ĐỀThanh HuyềnNo ratings yet
- Pyromet Examples Self StudyDocument2 pagesPyromet Examples Self StudyTessa BeeNo ratings yet
- OsciloscopioDocument103 pagesOsciloscopioFredy Alberto Gómez AlcázarNo ratings yet
- ARIIX - Clean - Eating - Easy - Ecipes - For - A - Healthy - Life - Narx PDFDocument48 pagesARIIX - Clean - Eating - Easy - Ecipes - For - A - Healthy - Life - Narx PDFAnte BaškovićNo ratings yet
- Lecture 19 Code Standards and ReviewDocument27 pagesLecture 19 Code Standards and ReviewAdhil Ashik vNo ratings yet
- 1KHW001492de Tuning of ETL600 TX RF Filter E5TXDocument7 pages1KHW001492de Tuning of ETL600 TX RF Filter E5TXSalvador FayssalNo ratings yet
- Institutions and StrategyDocument28 pagesInstitutions and StrategyFatin Fatin Atiqah100% (1)
- Eng Notes2Document10 pagesEng Notes2Arti KapurNo ratings yet
- Learning Competency PDFDocument1 pageLearning Competency PDFLEOMAR PEUGALNo ratings yet
- Coke Drum Repair Welch Aquilex WSI DCU Calgary 2009Document37 pagesCoke Drum Repair Welch Aquilex WSI DCU Calgary 2009Oscar DorantesNo ratings yet
- Answer: C: Exam Name: Exam Type: Exam Code: Total QuestionsDocument26 pagesAnswer: C: Exam Name: Exam Type: Exam Code: Total QuestionsMohammed S.GoudaNo ratings yet
- 1Document2 pages1TrầnLanNo ratings yet
- Bagian AwalDocument17 pagesBagian AwalCitra Monalisa LaoliNo ratings yet
- Experiment 2 HORSEPOWER EFFICIENCY GEAR RATIO AND SPEED RATIODocument10 pagesExperiment 2 HORSEPOWER EFFICIENCY GEAR RATIO AND SPEED RATIOJake Polo SantiagoNo ratings yet
- Citibank CaseDocument6 pagesCitibank CaseLalatendu Das0% (1)
- SL Generator Ultrasunete RincoDocument2 pagesSL Generator Ultrasunete RincoDariaNo ratings yet
- NCP - Impaired Urinary EliminationDocument3 pagesNCP - Impaired Urinary EliminationFretzgine Lou ManuelNo ratings yet
- French Cuisine RecipeDocument6 pagesFrench Cuisine RecipeJimmy AchasNo ratings yet
- FIREBASE Edited PresentationDocument12 pagesFIREBASE Edited PresentationNiraj MirgalNo ratings yet
- 1572 - Anantha Narayanan FFS CalculationDocument1 page1572 - Anantha Narayanan FFS CalculationAnantha NarayananNo ratings yet
- SPFL Monitoring ToolDocument3 pagesSPFL Monitoring ToolAnalyn EnriquezNo ratings yet
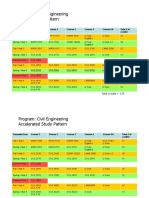
- HKUST 4Y Curriculum Diagram CIVLDocument4 pagesHKUST 4Y Curriculum Diagram CIVLfrevNo ratings yet
- Outlook of PonDocument12 pagesOutlook of Ponty nguyenNo ratings yet
- MSCM Dormitory Housing WEB UpdateDocument12 pagesMSCM Dormitory Housing WEB Updatemax05XIIINo ratings yet