You might also like
- Wire Size Calculator Formula Single Phase Three Phase CircuitsDocument1 pageWire Size Calculator Formula Single Phase Three Phase CircuitsSana AlzakiNo ratings yet
- Bridges BrochureDocument11 pagesBridges BrochureSana AlzakiNo ratings yet
- 2.TWI Record of Vision Tests 2015-08 Final PDFDocument2 pages2.TWI Record of Vision Tests 2015-08 Final PDFMurugananthamParamasivamNo ratings yet
- Interoductry To NDTDocument53 pagesInteroductry To NDTSana AlzakiNo ratings yet
- 5Document10 pages5lamia97No ratings yet
- Tons o Usc: M Re Lic M RDocument1 pageTons o Usc: M Re Lic M RSana AlzakiNo ratings yet
- Continuity Testing For CP PDFDocument7 pagesContinuity Testing For CP PDFSana AlzakiNo ratings yet
- FMVS2i Training With SM 1000 - QH 81176 Rev 03Document184 pagesFMVS2i Training With SM 1000 - QH 81176 Rev 03Sana Alzaki100% (2)
- UT Arabic BookDocument58 pagesUT Arabic BookSana AlzakiNo ratings yet
- Box Up PDFDocument1 pageBox Up PDFSana AlzakiNo ratings yet
- Ep HPG EngDocument20 pagesEp HPG EngSana AlzakiNo ratings yet
- Bridges BrochureDocument11 pagesBridges BrochureSana AlzakiNo ratings yet
- From Biology and Corrosion To Biocorrosion: Marine Corrosion Sulphate-Reducing Bacteria Steel Stainless SteelDocument8 pagesFrom Biology and Corrosion To Biocorrosion: Marine Corrosion Sulphate-Reducing Bacteria Steel Stainless SteelSana AlzakiNo ratings yet
- Types of JointDocument4 pagesTypes of JointSana AlzakiNo ratings yet
- Mechanical Design SpreadsheetDocument1 pageMechanical Design SpreadsheetHoney TiwariNo ratings yet
- Copiar de Nozzle - Design - ToolDocument2 pagesCopiar de Nozzle - Design - ToollavascudoNo ratings yet
- Engineering Example CalculationDocument78 pagesEngineering Example Calculationkae kaeNo ratings yet
- PDF - Inspection and TestingDocument13 pagesPDF - Inspection and TestingSana AlzakiNo ratings yet
- Asme Viii CalcsDocument20 pagesAsme Viii CalcsSriram VjNo ratings yet
- Api RP 579 FSSDocument25 pagesApi RP 579 FSSNdomadu100% (1)
- Ardrox 800 3 Aerosol MSDSDocument4 pagesArdrox 800 3 Aerosol MSDSSana AlzakiNo ratings yet
- Pressure Vessel Design Excel Sheet Basic Designing Non Critical PDocument1 pagePressure Vessel Design Excel Sheet Basic Designing Non Critical PSana AlzakiNo ratings yet
- Tank Strapping CalibrationDocument2 pagesTank Strapping CalibrationSana AlzakiNo ratings yet
- Api 653Document15 pagesApi 653Sana Alzaki100% (2)
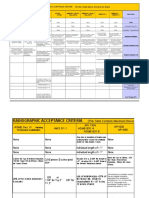
- Radiographic Acceptance Criteria: (This Table Contains Maximum Discontinuity Size Allowed)Document7 pagesRadiographic Acceptance Criteria: (This Table Contains Maximum Discontinuity Size Allowed)Alzaki AbdullahNo ratings yet
- Magnetic Flux Leakage TechnologyDocument12 pagesMagnetic Flux Leakage TechnologySana AlzakiNo ratings yet
- API 510 CalculaorDocument36 pagesAPI 510 CalculaorSana Alzaki33% (3)
- Electric Power Applications of Magnetic Particle TestingDocument9 pagesElectric Power Applications of Magnetic Particle TestingSana AlzakiNo ratings yet
- Hit Hy 70Document12 pagesHit Hy 70Rahim GhorbaniNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Emilia Perroni-Play - Psychoanalytic Perspectives, Survival and Human Development-Routledge (2013) PDFDocument262 pagesEmilia Perroni-Play - Psychoanalytic Perspectives, Survival and Human Development-Routledge (2013) PDFMihaela Ioana MoldovanNo ratings yet
- Introduction To ResearchDocument5 pagesIntroduction To Researchapi-385504653No ratings yet
- State of Indiana, County of Marion, SS: Probable Cause AffidavitDocument1 pageState of Indiana, County of Marion, SS: Probable Cause AffidavitIndiana Public Media NewsNo ratings yet
- JSP - How To Edit Table of Data Displayed Using JSP When Clicked On Edit ButtonDocument8 pagesJSP - How To Edit Table of Data Displayed Using JSP When Clicked On Edit Buttonrithuik1598No ratings yet
- Eng9 - Q3 - M4 - W4 - Interpret The Message Conveyed in A Poster - V5Document19 pagesEng9 - Q3 - M4 - W4 - Interpret The Message Conveyed in A Poster - V5FITZ100% (1)
- Synthesis of The ArtDocument2 pagesSynthesis of The ArtPiolo Vincent Fernandez100% (1)
- 52 Codes For Conscious Self EvolutionDocument35 pages52 Codes For Conscious Self EvolutionSorina LutasNo ratings yet
- 2015 ACI Airport Economics Report - Preview - FINAL - WEB PDFDocument12 pages2015 ACI Airport Economics Report - Preview - FINAL - WEB PDFDoris Acheng0% (1)
- Module 1 in Contemporary Arts First MonthDocument12 pagesModule 1 in Contemporary Arts First MonthMiles Bugtong CagalpinNo ratings yet
- C4 - Learning Theories and Program DesignDocument43 pagesC4 - Learning Theories and Program DesignNeach GaoilNo ratings yet
- AdmitCard 1688037Document1 pageAdmitCard 1688037P.Supreeth ReddyNo ratings yet
- Lecture Notes - Design of RC Structure - Day 5Document6 pagesLecture Notes - Design of RC Structure - Day 5Tapabrata2013No ratings yet
- Court of Appeals: DecisionDocument11 pagesCourt of Appeals: DecisionBrian del MundoNo ratings yet
- Apple Mango Buche'es Business PlanDocument51 pagesApple Mango Buche'es Business PlanTyron MenesesNo ratings yet
- EDUC 5240 - Creating Positive Classroom EnvironmentsDocument5 pagesEDUC 5240 - Creating Positive Classroom EnvironmentsMay Phyo ThuNo ratings yet
- Euro Tuner 1 2008 PDFDocument2 pagesEuro Tuner 1 2008 PDFDarwinNo ratings yet
- CRUSADE of PRAYERS 1-170 Litany 1-6 For The Key To Paradise For DistributionDocument264 pagesCRUSADE of PRAYERS 1-170 Litany 1-6 For The Key To Paradise For DistributionJESUS IS RETURNING DURING OUR GENERATION100% (10)
- Yoga Practice Guide: DR - Abhishek VermaDocument26 pagesYoga Practice Guide: DR - Abhishek VermaAmarendra Kumar SharmaNo ratings yet
- TAFJ-H2 InstallDocument11 pagesTAFJ-H2 InstallMrCHANTHANo ratings yet
- Evirtualguru Computerscience 43 PDFDocument8 pagesEvirtualguru Computerscience 43 PDFJAGANNATH THAWAITNo ratings yet
- Understanding Malaysian Property TaxationDocument68 pagesUnderstanding Malaysian Property TaxationLee Chee KheongNo ratings yet
- AIA Layer Standards PDFDocument47 pagesAIA Layer Standards PDFdanielNo ratings yet
- Sahar NSC FixDocument45 pagesSahar NSC FixSahar AndhikaNo ratings yet
- Mobile Services Tax Invoice for Dr Reddys LaboratoriesDocument3 pagesMobile Services Tax Invoice for Dr Reddys LaboratoriesK Sree RamNo ratings yet
- VT JCXDocument35 pagesVT JCXAkshay WingriderNo ratings yet
- The Basic Philosophical and Theological Notions of Saint Augustine - John C. Cooper PDFDocument21 pagesThe Basic Philosophical and Theological Notions of Saint Augustine - John C. Cooper PDFjusrmyrNo ratings yet
- 5 Whys Analysis SheetDocument3 pages5 Whys Analysis SheetAjay KrishnanNo ratings yet
- 40 Energising BreathsDocument1 page40 Energising BreathsOwlbearNo ratings yet
- Present Tense Exercises. Polish A1Document6 pagesPresent Tense Exercises. Polish A1Pilar Moreno DíezNo ratings yet
- Tele Phone Directory 2023-24Document10 pagesTele Phone Directory 2023-24vinoth5028No ratings yet