You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Training Material For Siemens S7 2012Document152 pagesTraining Material For Siemens S7 2012Charles Benwari100% (8)
- Wgu Study GuideDocument3 pagesWgu Study GuideFlyner PortugalNo ratings yet
- A Review of The Use of Electro-Motor Stimulation in Human MusclesDocument13 pagesA Review of The Use of Electro-Motor Stimulation in Human MusclesebrahimpanNo ratings yet
- Veritas Backup Exec 16 Tuning and Performance GuideDocument47 pagesVeritas Backup Exec 16 Tuning and Performance GuideAhmed AbdelfattahNo ratings yet
- r007 MTS-5800 GettingStartedGuideDocument178 pagesr007 MTS-5800 GettingStartedGuideNtibileng MoloiNo ratings yet
- Ion Process Adminguide 11.0 en USDocument122 pagesIon Process Adminguide 11.0 en USSanjit Kumar ShuklaNo ratings yet
- Dylan Stanford CertificateDocument4 pagesDylan Stanford Certificateapi-443252259No ratings yet
- COC2 Introduction To Networking Week 1Document41 pagesCOC2 Introduction To Networking Week 1Arman Santiago100% (1)
- CADD-1055 AutoCAD Lecture 1Document63 pagesCADD-1055 AutoCAD Lecture 1Kirandeep GandhamNo ratings yet
- C# SerialDocument7 pagesC# SerialJuan ArevaloNo ratings yet
- System Analysis and Design Practical GuideDocument13 pagesSystem Analysis and Design Practical GuideBaronremora0% (2)
- DC Motors Dynamic ModelDocument23 pagesDC Motors Dynamic ModelKaderNo ratings yet
- Mechatronics: Haoyong Yu, Sunan Huang, Gong Chen, Nitish ThakorDocument12 pagesMechatronics: Haoyong Yu, Sunan Huang, Gong Chen, Nitish ThakorebrahimpanNo ratings yet
- Sensors: Adaptive PIF Control For Permanent Magnet Synchronous Motors Based On GPCDocument18 pagesSensors: Adaptive PIF Control For Permanent Magnet Synchronous Motors Based On GPCebrahimpanNo ratings yet
- Models For DC MotorsDocument8 pagesModels For DC MotorsebrahimpanNo ratings yet
- Open Sim Tutorial 1Document10 pagesOpen Sim Tutorial 1Rayanne FlorianoNo ratings yet
- Solution 2Document5 pagesSolution 2Paulina MarquezNo ratings yet
- Yjmt 23 188Document9 pagesYjmt 23 188ebrahimpanNo ratings yet
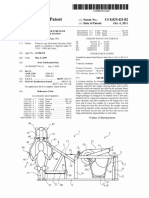
- United States Patent (10) Patent N6 US 8,029,424 B2: Thulin 45 Date of Patent: Oct. 4 2011Document15 pagesUnited States Patent (10) Patent N6 US 8,029,424 B2: Thulin 45 Date of Patent: Oct. 4 2011ebrahimpanNo ratings yet
- Open Sim Tutorial 1Document10 pagesOpen Sim Tutorial 1Rayanne FlorianoNo ratings yet
- I6 BrochureDocument2 pagesI6 BrochureebrahimpanNo ratings yet
- Adaptation of Multijoint Coordination During Standing Balance in Healthy Young and Healthy Old IndividualsDocument14 pagesAdaptation of Multijoint Coordination During Standing Balance in Healthy Young and Healthy Old IndividualsebrahimpanNo ratings yet
- 100720141556121410000Document6 pages100720141556121410000ebrahimpanNo ratings yet
- Adaptation of Multijoint Coordination During Standing Balance in Healthy Young and Healthy Old IndividualsDocument14 pagesAdaptation of Multijoint Coordination During Standing Balance in Healthy Young and Healthy Old IndividualsebrahimpanNo ratings yet
- A Review of The Clinical Value of Isolated Lumbar Extension Resistance Training For Chronic Low Back PainDocument19 pagesA Review of The Clinical Value of Isolated Lumbar Extension Resistance Training For Chronic Low Back PainebrahimpanNo ratings yet
- Design and Implementation of A Distributed Variable Impedance Actuator Using Parallel Linear SpringsDocument12 pagesDesign and Implementation of A Distributed Variable Impedance Actuator Using Parallel Linear SpringsebrahimpanNo ratings yet
- Spring Over Muscle (SOM) Actuator For Rehabilitation DevicesDocument4 pagesSpring Over Muscle (SOM) Actuator For Rehabilitation DevicesebrahimpanNo ratings yet
- An Assisted Waist Supporter For Vertebral RehabilitationDocument2 pagesAn Assisted Waist Supporter For Vertebral RehabilitationebrahimpanNo ratings yet
- Three-Dimensional Joint Reaction Forces and Moments at The Low Ba PDFDocument9 pagesThree-Dimensional Joint Reaction Forces and Moments at The Low Ba PDFebrahimpanNo ratings yet
- Supported Contact Mechanics ModelsDocument8 pagesSupported Contact Mechanics ModelsebrahimpanNo ratings yet
- Watanabe 2010Document4 pagesWatanabe 2010ebrahimpanNo ratings yet
- 100720141556121410000Document6 pages100720141556121410000ebrahimpanNo ratings yet
- Mca 21 00016 v2 PDFDocument15 pagesMca 21 00016 v2 PDFebrahimpanNo ratings yet
- Hasegawa 1985Document6 pagesHasegawa 1985ebrahimpanNo ratings yet
- Strain CylindricalDocument4 pagesStrain CylindricalebrahimpanNo ratings yet
- Viscoelasticity - RheologicalDocument10 pagesViscoelasticity - RheologicalsaltyNo ratings yet
- Plane Strain Problems of Transversely Isotropic Thermoelastic MediaDocument15 pagesPlane Strain Problems of Transversely Isotropic Thermoelastic MediaebrahimpanNo ratings yet
- Elastic Constitutive EquationsDocument46 pagesElastic Constitutive EquationsAmithkumar R AchariNo ratings yet
- Hasegawa 1985Document6 pagesHasegawa 1985ebrahimpanNo ratings yet
- NtbtlogDocument35 pagesNtbtlogRanzozo KizaNo ratings yet
- Devguide Python Org en LatestDocument197 pagesDevguide Python Org en LatestchinmayagubbiNo ratings yet
- 9604552-00#3.10A Ocean 2014 - Users Manual - EnglishDocument149 pages9604552-00#3.10A Ocean 2014 - Users Manual - EnglishTedy XdxdNo ratings yet
- SN Ind 1 003 - Securityaccess - CanoeDocument6 pagesSN Ind 1 003 - Securityaccess - CanoeDuong HoangNo ratings yet
- Crystal Ball-Developer-s-Guide-Release-11 PDFDocument288 pagesCrystal Ball-Developer-s-Guide-Release-11 PDFeeyore_ade6119No ratings yet
- QoMoD: Effective Query Optimization in Mobile Database SystemsDocument9 pagesQoMoD: Effective Query Optimization in Mobile Database SystemsJournalofICTNo ratings yet
- IM-100 IM-202 IM-300 IM-400 IM-500 Operating and Programming - TOCDocument6 pagesIM-100 IM-202 IM-300 IM-400 IM-500 Operating and Programming - TOCRudinHarianto0% (1)
- CONNECTNEXT USER GUIDE Nexon Touchscreen Infotainment ManualDocument153 pagesCONNECTNEXT USER GUIDE Nexon Touchscreen Infotainment ManualFaraz MirzaNo ratings yet
- Labview MeasurementDocument1 pageLabview Measurementmanoj pandeyNo ratings yet
- Invixium Configuring-Input-and-OutputDocument11 pagesInvixium Configuring-Input-and-OutputMarco Antonio RubinaNo ratings yet
- Network Topology DiagramDocument7 pagesNetwork Topology DiagramSatvik SalatNo ratings yet
- How To C Chat ServerDocument19 pagesHow To C Chat ServerSzelSzabNo ratings yet
- Msi Katana GF66 20240122 2010Document8 pagesMsi Katana GF66 20240122 2010silentfinisher786No ratings yet
- Guide To Intraday Trading by Jitendra GalaDocument3 pagesGuide To Intraday Trading by Jitendra GalaShashank Choudhary0% (3)
- Annual Report 2016 17 PDFDocument284 pagesAnnual Report 2016 17 PDFKartik AhirNo ratings yet
- Speed ControlDocument4 pagesSpeed ControlArfa ShaikhNo ratings yet
- Hardware Information Guide: Emc Vnxe Series Vnxe3200Document65 pagesHardware Information Guide: Emc Vnxe Series Vnxe3200Anonymous n4NOOONo ratings yet
- Simatic Wincc v75 Sp1 Architectures enDocument56 pagesSimatic Wincc v75 Sp1 Architectures enGian Paolo Berardi GiampietroNo ratings yet
- Chat GPT What Is ItDocument1 pageChat GPT What Is ItJOSIP JANCIKICNo ratings yet
- Etos TD and Etos ED Innovative Motor-Drive Solutions With Integrated MonitoringDocument12 pagesEtos TD and Etos ED Innovative Motor-Drive Solutions With Integrated MonitoringKelly chatukuNo ratings yet