Professional Documents
Culture Documents
Sineax Dme 440b
Uploaded by
PacoCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Sineax Dme 440b
Uploaded by
PacoCopyright:
Available Formats
SINEAX DME 440 with RS 485 interface
SINEAX DME 440 with RS 485 interface
Programmable multi-transducer
Programmable multi-transducer
for the measurement of electrical variables in heavy-
current power system
Application
SINEAX DME 440 (Fig. 1) is a programmable transducer with a
RS 485 bus interface (MODBUS). It supervises several variables
of an electrical power system simultaneously and generates 4
proportional analogue output signals.
The RS 485 interface enables the user to determine the number of
variables to be supervised (up to the maximum available). The
levels of all internal energy meters that have been configured (max.
4) can also viewed. Provision is made for programming the SINEAX
DME 440 via the bus. A standard EIA 485 interface can be used,
but there is no dummy load resistor for the bus.
The transducers are also equipped with an RS 232 serial interface
to which a PC with the corresponding software can be connected
for programming or accessing and executing useful ancillary func-
tions. This interface is needed for bus operation to configure the
device address, the Baud rate and possibly increasing the telegram
waiting time (if the master is too slow) defined in the MODBUS Fig. 1. SINEAX DME 440 in housing T24,
clipped onto a top-hat rail.
protocol.
The usual methods of connection, the types of measured variables,
their ratings, the transfer characteristic for each output and the
For all heavy-current power system variables
type of internal energy meter are the main parameters that can be
programmed. 4 analogue outputs
The ancillary functions include a power system check, provision for Input voltage up to 693 V (phase-to-phase)
displaying the measured variably on a PC monitor, the simulation Universal analogue outputs (programmable)
of the outputs for test purposes and a facility for printing name- High accuracy: U/I 0.2% and P 0.25% (under reference conditions)
plates.
4 integrated energy meters, storage every each 203 s, storage for:
The transducer fulfils all the essential requirements and regulations 20 years
concerning electromagnetic compatibility (EMC) and safety
Windows software with password protection for programming, data
(IEC 1010 resp. EN 61 010). It was developed and is manufactured
analysis, power system status simulation, acquisition of meter data
and tested in strict accordance with the quality assurance stand-
and making settings
ard ISO 9001.
DC-, AC-power pack with wide power supply tolerance / universal
Features / Benefits Provision for either snapping the transducer onto top-hat rails or se-
curing it with screws to a wall or panel
Simultaneous measurement of several variables of a heavy-current
power system / Full supervision of an asymmetrically loaded four-wire
power system, rated current 1 to 6 A, rated voltage 57 to 400 V (phase- 1 2 7 8
to-neutral) or 100 to 693 V (phase-to-phase) I1 D/A A
6
Measured variables Output Types I2 D/A B
4 analogue outputs and I3 3 4 5 D/A C
DME 440
bus RS 485 (MODBUS) A/D
Current, voltage (rms), L1 D/A D
2 analogue outputs and
active/reactive/apparent power DME 424 6
4 digital outputs L2
cos, sin, power factor RS-
or 10 485
RMS value of the current with L3 9
4 analogue outputs and N
wire setting range (bimetal 2 digital outputs see data DME 442
measuring function) UH
sheet DME 424/442-1 Le 11 RS-232
Slave pointer function for the Data bus LON see data
measurement of the RMS DME 400
sheet DME 400-1 Le 1 = Input transformer 7 = D/A converter
value IB 2 = Multiplexer 8 = Output amplifier / Latching stage
Without analogue outputs,
Frequency with bus RS 485 (MODBUS) 3 = Latching stage 9 = Programming interface RS-232
Average value of the currents see data sheet DME 401 4 = A/D converter 10 = Bus RS 485 (MODBUS)
with sign of the active power DME 401-1 Le 5 = Microprocessor 11 = Power supply
(power system only) 6 = Electrical insulation
PROFIBUS DP see data
DME 406
sheet DME 406-1 Le Fig. 2. Block diagram.
Camille Bauer Data sheet DME 440-1 Le 09.03 1
SINEAX DME 440 with RS 485 interface
Programmable multi-transducer
Symbols
Symbols Meaning Symbols Meaning (Continuation)
X Measured variable Q Reactive power of the system
X0 Lower limit of the measured variable Q = Q1 + Q2 + Q3
X1 Break point of the measured variable Q1 Reactive power phase 1
(phase-to-neutral L1 N)
X2 Upper limit of the measured variable
Q2 Reactive power phase 2
Y Output variable (phase-to-neutral L2 N)
Y0 Lower limit of the output variable Q3 Reactive power phase 3
(phase-to-neutral L3 N)
Y1 Break point of the output variable
Y2 Upper limit of the output variable S Apparent power of the system
S = I12 + I22 + I32 U12 + U22 + U32
U Input voltage S1 Apparent power phase 1
Ur Rated value of the input voltage (phase-to-neutral L1 N)
U 12 Phase-to-phase voltage L1 L2 S2 Apparent power phase 2
(phase-to-neutral L2 N)
U 23 Phase-to-phase voltage L2 L3
S3 Apparent power phase 3
U 31 Phase-to-phase voltage L3 L1 (phase-to-neutral L3 N)
U1N Phase-to-neutral voltage L1 N Sr Rated value of the apparent power of the
U2N Phase-to-neutral voltage L2 N system
U3N Phase-to-neutral voltage L3 N PF Active power factor cos = P/S
UM Average value of the voltages PF1 Active power factor phase 1 P1/S1
(U1N + U2N + U3N) / 3
PF2 Active power factor phase 2 P2/S2
I Input current PF3 Active power factor phase 3 P3/S3
I1 AC current L1 QF Reactive power factor sin = Q/S
I2 AC current L2 QF1 Reactive power factor phase 1 Q1/S1
I3 AC current L3 QF2 Reactive power factor phase 2 Q2/S2
Ir Rated value of the input current QF3 Reactive power factor phase 3 Q3/S3
IM Average value of the currents (I1 + I2 + I3) / 3
LF Power factor of the system
IMS Average value of the currents and sign of the LF = sgnQ (1 PF)
active power (P) LF1 Power factor phase 1
sgnQ1 (1 PF1
)
IB RMS value of the current with wire setting range
(bimetal measuring function) LF2 Power factor phase 2
sgnQ2 (1 PF2
)
IBT Response time for IB
LF3 Power factor phase 3
BS Slave pointer function for the measurement of sgnQ3 (1 PF3
)
the RMS value IB
BST Response time for BS c Factor for the intrinsic error
Phase-shift between current and voltage R Output load
Rn Rated burden
F Frequency of the input variable
Fn Rated frequency H Power supply
Hn Rated value of the power supply
P Active power of the system P = P1 + P2 + P3
P1 Active power phase 1 CT c.t. ratio
(phase-to-neutral L1 N) VT v.t. ratio
P2 Active power phase 2
(phase-to-neutral L2 N)
P3 Active power phase 3
(phase-to-neutral L3 N)
2 Data sheet DME 440-1 Le 09.03 Camille Bauer
SINEAX DME 440 with RS 485 interface
Programmable multi-transducer
Applicable standards and regulations Consumption: Voltage circuit: U2 / 400 k
Condition:
Characteristic XH01 XH10
EN 60 688 Electrical measuring transducers for con-
verting AC electrical variables into analogue Current circuit: 0.3 VA I/5 A
and digital signals
IEC 1010 or Continuous thermal ratings of inputs
EN 61 010 Safety regulations for electrical measuring,
control and laboratory equipment Current circuit 10 A 400 V
single-phase AC system
EN 60529 Protection types by case (code IP)
693 V
IEC 255-4 Part E5 High-frequency disturbance test (static
three-phase system
relays only)
IEC 1000-4-2, 3, 4, 6 Electromagnetic compatibility for industrial- Voltage circuit 480 V single-phase AC system
process measurement and control equip- 831 V three-phase system
ment
VDI/VDE 3540, Short-time thermal rating of inputs
page 2 Reliability of measuring and control equip-
ment (classification of climates) Input Number of Duration Interval
DIN 40 110 AC quantities variable inputs of between two
DIN 43 807 Terminal markings overload overloads
IEC 68 /2-6 Basic environmental testing procedures, Current circuit 400 V single-phase AC system
vibration, sinusoidal 693 V three-phase system
EN 55011 Electromagnetic compatibility of data 100 A 5 3s 5 min.
processing and telecommunication equip-
ment 250 A 1 1s 1 hour
Limits and measuring principles for radio Voltage circuit 1 A, 2 A, 5 A
interference and information equipment
Single-phase
IEC 1036 Alternating current static watt-hour meters AC system
for active energy (classes 1 and 2) 600 V
Hintern: 1.5 Ur 10 10 s 10 s
DIN 43864 Current interface for the transmission of
impulses between impulse encoder coun- Three-phase
ter and tarif meter system
1040 V
UL 94 Tests for flammability of plastic materials
Hintern: 1.5 Ur 10 10 s 10 s
for parts in devices and appliances
MODBUS (Bus interface RS-485)
Terminals: Screw terminals, terminals 23, 24, 25 and
26
Connecting cable: Screened twisted pair
Max. distance: Approx. 1200 m (approx. 4000 ft.)
Baudrate: 1200 9600 Bd (programmable)
Number of bus
stations: 32 (including master)
Dummy load: Not required
Technical data
Inputs + GND
Input variables: see Table 2 and 3 23 24 25 26
Measuring ranges: see Table 2 and 3
Waveform: Sinusoidal
Rated frequency: 5060 Hz; 16 2/3 Hz MODBUS is a registered trademark of the Schneider Automation Inc.
Camille Bauer Data sheet DME 440-1 Le 09.03 3
SINEAX DME 440 with RS 485 interface
Programmable multi-transducer
Analogue outputs System response
For the outputs A, B, C and D: Accuracy class: (the reference value is the full-scale
Output variable Y Impressed Impressed value Y2)
DC current DC voltage
Measured Condition Accuracy class*
Full scale Y2 see Ordering see Ordering variable
information information
System:
Limits of output Active, reactive 0.5 X2/Sr 1.5 0.25 c
signal for input and apparent 0.3 X2/Sr < 0.5 0.5 c
overload power
and/or R=0 1.25 Y2 40 mA
Phase:
R 30 V 1.25 Y2 Active, reactive 0.167 X2/Sr 0.5 0.25 c
Rated useful range 7.5 V 15 V Y2 and apparent
Y2 0.1 X2/Sr < 0.167 0.5 c
of output load 0 power
Y2 Y2 2 mA 1 mA
AC component of 0.5Sr S 1.5 Sr, 0.25 c
output signal 0.005 Y2 0.005 Y2 (X2 - X0) = 2
(peak-to-peak) 0.5Sr S 1.5 Sr, 0.5 c
1 (X2 - X0) < 2
The outputs A, B, C and D may be either short or open-circuited.
They are electrically insulated from each other and from all other Power factor, 0.5Sr S 1.5 Sr, 1.0 c
circuits (floating). active power 0.5 (X2 - X0) < 1
All the full-scale output values can be reduced subsequently using factor 0.1Sr S < 0.5Sr, 0.5 c
the programming software, but a supplementary error results. and reactive (X2 - X0) = 2
power factor 0.1Sr S < 0.5Sr, 1.0 c
The hardware full-scale settings for the analogue outputs may also
be changed subsequently. Conversion of a current to a voltage 1 (X2 - X0) < 2
output or vice versa is also possible. This necessitates changing 0.1Sr S < 0.5Sr, 2.0 c
resistors on the output board. The full-scale values of the current 0.5 (X2 - X0) < 1
and voltage outputs are set by varying the effective value of two AC voltage 0.1 Ur U 1.2 Ur 0.2 c
parallel resistors (better resolution). The values of the resistors are
selected to achieve the minimum absolute error. Calibration with AC current/ 0.1 Ir I 1.5 Ir 0.2 c
the programming software is always necessary following conver- current averages
sion of the outputs. Refer to the Operating Instructions. Caution: System 0.1 Ur U 1.2 Ur 0.15 + 0.03 c
The warranty is void if the device is tampered with! frequency resp. (fN = 50...60 Hz)
0.1 Ir I 1.5 Ir 0.15 + 0.1 c
(fN = 16 2/3 Hz)
Energy meter acc. to IEC 1036 1.0
0.1 Ir I 1.5 Ir
* Basic accuracy 0.5 c for applications with phase-shift
Reference conditions Duration of the
Ambient temperature: 15 30 C measurement cycle: Approx. 0.5 to s 1.2 s at 50 Hz,
depending on measured variable and pro-
Pre-conditioning: 30 min. acc. to EN 60 688 gramming
Section 4.3, Table 2
Response time: 1 2 times the measurement cycle
Input variable: Rated useful range
Factor c (the highest value applies):
Power supply: H = Hn 1%
Active/reactive factor: cos = 1 resp. sin = 1 Linear characteristic: Y0
1-
Frequency: 50 60 Hz, 16 2/3 Hz Y2
c= or c = 1
X0
Waveform: Sinusoidal, form factor 1.1107 1-
X2
Output load: DC current output: Bent characteristic:
7.5 V Y1 - Y0 X2
Rn = 1% X0 X X1 c= or c = 1
Y2 X1 - X0 Y2
DC voltage output: Y1
1-
Y2 1% Y2
Rn = X1 < X X2 c= or c = 1
1 mA X1
1-
Miscellaneous: EN 60 688 X2
4 Data sheet DME 440-1 Le 09.03 Camille Bauer
SINEAX DME 440 with RS 485 interface
Programmable multi-transducer
Y Y Programming connector on transducer
X0/Y0 Interface: RS 232 C
X0/Y0
X2/Y2 X1/Y1 DSUB socket: 9-pin
X2/Y2 5
9 GND
X X
CTS DTR The interface is electrically insulated
RTS TXD from all other circuits.
RXD
DSR
6 1
Installation data
Limit of the output Limit of the output
range range Housing: Housing T24
See Section Dimensioned drawings
Fig. 3. Examples of settings with Fig. 4. Examples of settings Housing material: Lexan 940 (polycarbonate),
linear characteristic. with bent characteristic. flammability class V-0 acc. to UL 94,
self-extinguishing, non-dripping, free
of halogen
Influencing quantities and permissible variations Mounting: For snapping onto top-hat rail
(35 15 mm or 35 7.5 mm) acc. to
Acc. to EN 60 688 EN 50 022
or
directly onto a wall or panel using the
Electrical safety
pull-out screw hole brackets
Protection class: II Orientation: Any
Enclosure protection: IP 40, housing Weight: Approx. 0.7 kg
IP 20, terminals
Terminals
Installation category: III
Type: Screw terminals with wire guards
Insulation test Max. wire gauge: 4.0 mm2 single wire or
(versus earth): Input voltage: AC 400 V 2 2.5 mm2 fine wire
Input current: AC 400 V
Vibration withstand
Output: DC 40 V
(tested according to DIN EN 60 068-2-6)
Power supply: AC 400 V
Acceleration: 2g
DC 230 V
Frequency range: 10 150 10 Hz, rate of frequency
Surge test: 5 kV; 1.2/50 s; 0.5 Ws sweep: 1 octave/minute
Test voltages: 50 Hz, 1 min. according to Number of cycles: 10 in each of the three axes
EN 61 010-1 Result: No faults occurred, no loss of accu-
racy and no problems with the snap
5550 V, inputs versus all other circuits
fastener
as well as outer surface
3250 V, input circuits versus each Ambient conditions
other Variations due to ambient
3700 V, power supply versus outputs temperature: 0.2% / 10 K
and SCI as well as outer surface Nominal range of use
for temperature: 0153045 C (usage group II)
490 V, outputs and SCI versus each
other and versus outer surface Operating temperature: 10 to + 55 C
Storage temperature: 40 to + 85 C
Power supply
Annual mean
DC-, AC-power pack (DC and 50 60 Hz)
relative humidity: 75%
Table 1: Rated voltages and tolerances
Rated voltage UN Tolerance
24 60 V DC/AC DC 15 + 33%
85 230 V DC/AC AC 10%
Consumption: 9 W resp. 10 VA
Camille Bauer Data sheet DME 440-1 Le 09.03 5
SINEAX DME 440 with RS 485 interface
Programmable multi-transducer
Table 2: Ordering Information
DESCRIPTION MARKING
1. Mechanical design
Housing T24 for rail and wall mounting 440 - 1
2. Rated frequency
1) 50 Hz (60 Hz possible without additional error; 16 2/3 Hz, additional error 1.25 c) 1
2) 60 Hz (50 Hz possible without additional error; 16 2/3 Hz, additional error 1.25 c) 2
3) 16 2/3 Hz (not re-programming by user, 50/60 Hz possible, but with additional error 1.25 c) 3
3. Power supply
Nominal range
7) DC/AC 24 60 V 7
8) DC/AC 85 230 V 8
4. Power supply connection
1) External (standard) 1
2) Internal from voltage input (not allowed for CSA) 2
Line 2: Not available for rated frequency 16 2/3 Hz and applications A15 / A16 / A24 (see Table 3)
Caution: The power supply voltage must agree with the input voltage (Table 3)
5. Full-scale output signal, output A
1) Output A, Y2 = 20 mA (standard) 1
9) Output A, Y2 [mA] 9
Z) Output A, Y2 [V] Z
Line 9: Full-scale current Y2 [mA] 1 to 20
Line Z: Full-scale voltage Y2 [V] 1 to 10
6. Full-scale output signal, output B
1) Output B, Y2 = 20 mA (standard) 1
9) Output B, Y2 [mA] 9
Z) Output B, Y2 [V] Z
7. Full-scale output signal, output C
1) Output C, Y2 = 20 mA (standard) 1
9) Output C, Y2 [mA] 9
Z) Output C, Y2 [V] Z
8. Full-scale output signal, output D
1) Output D, Y2 = 20 mA (standard) 1
9) Output D, Y2 [mA] 9
Z) Output D, Y2 [V] Z
9. Test certificate
0) None supplied 0
1) Supplied 1
10. Programming
0) Basic 0
9) According to specification 9
Line 0: Not available if the power supply is taken from the voltage input
Line 9: All the programming data must be entered on Form W 2389e and the form must
be included with the order.
6 Data sheet DME 440-1 Le 09.03 Camille Bauer
SINEAX DME 440 with RS 485 interface
Programmable multi-transducer
Table 3: Programming
DESCRIPTION Application
A11 A16 A34 A24 / A44
1. Application (system)
Single-phase AC A11
3-wire, 3-phase symmetric load, phase-shift U: L1-L2, I: L1 * A12
3-wire, 3-phase symmetric load A13
4-wire, 3-phase symmetric load A14
3-wire, 3-phase symmetric load, phase-shift U: L3-L1, I: L1 * A15
3-wire, 3-phase symmetric load, phase-shift U: L2-L3, I: L1 * A16
3-wire, 3-phase asymmetric load A34
4-wire, 3-phase asymmetric load A44
4-wire, 3-phase asymmetric load, open-Y A24
2. Input voltage
Rated value Ur = 57.7 V U01
Rated value Ur = 63.5 V U02
Rated value Ur = 100 V U03
Rated value Ur = 110 V U04
Rated value Ur = 120 V U05
Rated value Ur = 230 V U06
Rated value Ur [V] U91
Rated value Ur = 100 V U21 U21 U21
Rated value Ur = 110 V U22 U22 U22
Rated value Ur = 115 V U23 U23 U23
Rated value Ur = 120 V U24 U24 U24
Rated value Ur = 400 V U25 U25 U25
Rated value Ur = 500 V U26 U26 U26
Rated value Ur [V] U93 U93 U93
Lines U01 to U06: Only for single phase AC current or
4-wire, 3-phase symmetric load
Line U91: Ur [V] 57 to 400
Line U93: Ur [V] > 100 to 693
3. Input current
Rated value Ir = 1 A V1 V1 V1
Rated value Ir = 2 A V2 V2 V2
Rated value Ir = 5 A V3 V3 V3
Rated value Ir > 1 to 6 [A] V9 V9 V9
4. Primary rating (primary transformer)
Without specification of primary rating W0 W0 W0
CT = A/ A VT = kV / V W9 W9 W9
Line W9: Specify transformer ratio prim./sec.,
e.g. 1000/5 A; 33 kV/110 V
* Basic accuracy 0.5 c
Table 3 continued on next page!
Camille Bauer Data sheet DME 440-1 Le 09.03 7
SINEAX DME 440 with RS 485 interface
Programmable multi-transducer
Continuation Table 3: Programming
DESCRIPTION Application
A11 A16 A34 A24 / A44
5. Measured variable, output A
Not used AA000 AA000 AA000
Initial value X0 Final value X2
U System X0 = 0 X2 = Ur* AA001
U12 L1-L2 X0 = 0 X2 = Ur* AA001 AA001
U System 0 X0 0.9 X2 0.8 Ur X2 1.2 Ur* AA901
U1N L1-N 0 X0 0.9 X2 0.8 Ur/ 3 X2 1.2 Ur/ 3 * AA902
U2N L2-N 0 X0 0.9 X2 0.8 Ur/ 3 X2 1.2 Ur/ 3 * AA903
U3N L3-N 0 X0 0.9 X2 0.8 Ur/ 3 X2 1.2 Ur/ 3 * AA904
U12 L1-L2 0 X0 0.9 X2 0.8 Ur X2 1.2 Ur* AA905 AA905
U23 L2-L3 0 X0 0.9 X2 0.8 Ur X2 1.2 Ur * AA906 AA906
U31 L3-L1 0 X0 0.9 X2 0.8 Ur X2 1.2 Ur * AA907 AA907
I System 0 X0 0.8 X2 0.5 Ir X2 1.5 Ir AA908
I1 L1 0 X0 0.8 X2 0.5 Ir X2 1.5 Ir AA909 AA909
I2 L2 0 X0 0.8 X2 0.5 Ir X2 1.5 Ir AA910 AA910
I3 L3 0 X0 0.8 X2 0.5 Ir X2 1.5 Ir AA911 AA911
P System X2 X0 0.8 X2 0.3 X2 / Sr 1.5 AA912 AA912 AA912
P1 L1 X2 X0 0.8 X2 0.1 X2 / Sr 0.5 AA913
P2 L2 X2 X0 0.8 X2 0.1 X2 / Sr 0.5 AA914
P3 L3 X2 X0 0.8 X2 0.1 X2 / Sr 0.5 AA915
Q System X2 X0 0.8 X2 0.3 X2 / Sr 1.5 AA916 AA916 AA916
Q1 L1 X2 X0 0.8 X2 0.1 X2 / Sr 0.5 AA917
Q2 L2 X2 X0 0.8 X2 0.1 X2 / Sr 0.5 AA918
Q3 L3 X2 X0 0.8 X2 0.1 X2 / Sr 0.5 AA919
PF System 1 X0 (X2 0.5) 0 X2 1 AA920 AA920 AA920
PF1 L1 1 X0 (X2 0.5) 0 X2 1 AA921
PF2 L2 1 X0 (X2 0.5) 0 X2 1 AA922
PF3 L3 1 X0 (X2 0.5) 0 X2 1 AA923
QF System 1 X0 (X2 0.5) 0 X2 1 AA924 AA924 AA924
QF1 L1 1 X0 (X2 0.5) 0 X2 1 AA925
QF2 L2 1 X0 (X2 0.5) 0 X2 1 AA926
QF3 L3 1 X0 (X2 0.5) 0 X2 1 AA927
F 15.3 Hz X0 X2 1 Hz X0 + 1 Hz X2 65 Hz AA928 AA928 AA928
S System 0 X0 0.8 X2 0.3 X2 / Sr 1.5 AA929 AA929 AA929
S1 L1 0 X0 0.8 X2 0.1 X2 / Sr 0.5 AA930
S2 L2 0 X0 0.8 X2 0.1 X2 / Sr 0.5 AA931
S3 L3 0 X0 0.8 X2 0.1 X2 / Sr 0.5 AA932
IM System 0 X0 0.8 X2 0.5 Ir X2 1.5 Ir AA933 AA933
IMS System X2 X0 0.8 X2 0.5 Ir X2 1.5 Ir AA934 AA934
LF System 1 X0 (X2 0.5) 0 X2 1 AA935 AA935 AA935
LF1 L1 1 X0 (X2 0.5) 0 X2 1 AA936
LF2 L2 1 X0 (X2 0.5) 0 X2 1 AA937
LF3 L3 1 X0 (X2 0.5) 0 X2 1 AA938
IB System X0 = 0 1 IBT 30 min 0.5 Ir X2 1.5 Ir AA939
IB1 L1 X0 = 0 1 IBT 30 min 0.5 Ir X2 1.5 Ir AA940 AA940
IB2 L2 X0 = 0 1 IBT 30 min 0.5 Ir X2 1.5 Ir AA941 AA941
IB3 L3 X0 = 0 1 IBT 30 min 0.5 Ir X2 1.5 Ir AA942 AA942
BS System X0 = 0 1 BST 30 min 0.5 Ir X2 1.5 Ir AA943
BS1 L1 X0 = 0 1 BST 30 min 0.5 Ir X2 1.5 Ir AA944 AA944
BS2 L2 X0 = 0 1 BST 30 min 0.5 Ir X2 1.5 Ir AA945 AA945
BS3 L3 X0 = 0 1 BST 30 min 0.5 Ir X2 1.5 Ir AA946 AA946
UM System 0 X0 0.8 X2 0.8 Ur X2 1.2 Ur* AA947
* Where the power supply is taken from the measured voltage, the transmitter only operates in the range U = 0.8 Ur 1.2 Ur and the specified accuracy
is only guaranteed in the range U = 0.9 Ur 1.1 Ur.
Table 3 continued on next page!
8 Data sheet DME 440-1 Le 09.03 Camille Bauer
SINEAX DME 440 with RS 485 interface
Programmable multi-transducer
Continuation Table 3: Programming
DESCRIPTION Application
A11 A16 A34 A24 / A44
6. Output signal, output A
Initial value Y0 Final value Y2
DC current Y0 = 0 Y2 = 20 mA AB01 AB01 AB01
Y2 Y0 0.2 Y2 1 mA Y2 20 mA AB91 AB91 AB91
DC voltage
Y2 Y0 0.2 Y2 1V Y2 10 V AB92 AB92 AB92
7. Characteristic, output A
Linear AC01 AC01 AC01
Bent (X0 + 0.015 X2) X1 0.985 X2 Y0 Y1 Y2 AC91 AC91 AC91
8. Limits, output A
Standard Ymin = Y0 0.25 Y2 Ymax = 1.25 Y2 AD01 AD01 AD01
(Y0 0.25 Y2) Ymin Y0 Y2 Ymax 1.25 Y2 AD91 AD91 AD91
9. Measured variable, output B
Same as output A, but markings start with a BA BA BA
capital B
10. Output signal, output B
Same as output A, but markings start with a BB .. BB .. BB ..
capital B
11. Characteristic, output B
Same as output A, but markings start with a BC .. BC .. BC ..
capital B
12. Limits, output B
Same as output A, but markings start with a BD .. BD .. BD ..
capital B
13. Measured variable, output C
Same as output A, but markings start with a CA CA CA
capital C
14. Output signal, output C
Same as output A, but markings start with a CB .. CB .. CB ..
capital C
15. Characteristic, output C
Same as output A, but markings start with a CC .. CC .. CC ..
capital C
16. Limits, output C
Same as output A, but markings start with a CD .. CD .. CD ..
capital C
17. Measured variable, output D
Same as output A, but markings start with a DA .. DA .. DA ..
capital D
18. Output signal, output D
Same as output A, but markings start with a DB .. DB .. DB ..
capital D
Table 3 continued on next page!
Camille Bauer Data sheet DME 440-1 Le 09.03 9
SINEAX DME 440 with RS 485 interface
Programmable multi-transducer
Continuation Table 3: Programming
DESCRIPTION Application
A11 A16 A34 A24 / A44
19. Characteristic, output D
Same as output A, but markings start with a DC .. DC .. DC ..
capital D
20. Limits, output D
Same as output A, but markings start with a DD .. DD .. DD ..
capital D
21. Energy meter 1
Not used EA00 EA00 EA00
I System [Ah] EA50
I1 L1 [Ah] EA51 EA51
I2 L2 [Ah] EA52 EA52
I3 L3 [Ah] EA53 EA53
S System [VAh] EA54 EA54 EA54
S1 L1 [VAh] EA55
S2 L2 [VAh] EA56
S3 L3 [VAh] EA57
P System (incoming) [Wh] EA58 EA58 EA58
P1 L1 (incoming) [Wh] EA59
P2 L2 (incoming) [Wh] EA60
P3 L3 (incoming) [Wh] EA61
Q System (inductive) [Varh] EA62 EA62 EA62
Q1 L1 (inductive) [Varh] EA63
Q2 L2 (inductive) [Varh] EA64
Q3 L3 (inductive) [Varh] EA65
P System (outgoing) [Wh] EA66 EA66 EA66
P1 L1 (outgoing) [Wh] EA67
P2 L2 (outgoing) [Wh] EA68
P3 L3 (outgoing) [Wh] EA69
Q System (capacitive) [Varh] EA70 EA70 EA70
Q1 L1 (capacitive) [Varh] EA71
Q2 L2 (capacitive) [Varh] EA72
Q3 L3 (capacitive) [Varh] EA73
22. Energy meter 2
Same as energy meter 1, but markings start with a FA .. FA .. FA ..
capital F
23. Energy meter 3
Same as energy meter 1, but markings start with a GA .. GA .. GA ..
capital G
24. Energy meter 4
Same as energy meter 1, but markings start with a HA .. HA .. HA ..
capital H
10 Data sheet DME 440-1 Le 09.03 Camille Bauer
SINEAX DME 440 with RS 485 interface
Programmable multi-transducer
Electrical connections
RS 485
A B C D
Tx/Rx
Function Connect. + + + + + GND
Measuring input AC current IL1 1/3
IL2 4/6
IL3 7/9
AC voltage UL1 2 Front
15 16 17 18 19 20 21 22 23 24 25 26
UL2 5
UL3 8
N 11
Outputs Analogue
RS 232
+ 15
A
16
+ 17
B 18
+ 19
C 20
+ 21
D
22
RS 485 Tx+/Rx+ 23
(MODBUS) Tx /Rx 24
GND 25
26 1 2 3 4 5 6 7 8 9 11 13 14
Power supply AC ~ 13
~ 14
DC + 13
14 IL1 IL1 IL2 IL2 IL3 IL3
UL1 UL2 UL3 N
(+) ()
If power supply is taken from the measured voltage
Measuring input
internal connections are as follow:
Application (system) Internal connection
Terminal / System
Single-phase AC current 2 / 11 (L1 N)
4-wire 3-phase 2 / 11 (L1 N)
symmetric load
All other (apart from 2/5 (L1 L2)
A15 / A16 / A24)
Measuring inputs
System /
application Terminals
2 11 1 3 2 11 1 3 2 11 1 3
Single-phase
u v
AC system
k l k l
U V
L1 L1 L1
K L K L
N N N
Camille Bauer Data sheet DME 440-1 Le 09.03 11
SINEAX DME 440 with RS 485 interface
Programmable multi-transducer
Measuring inputs
System /
application Terminals
2 5 8 1 3 2 5 8 1 3 2 5 8 1 3
u v u v
k l k l
U V U V
L1 L1 L1
K L K L
3-wire L2 L2 L2
3-phase L3 L3 L3
symmetric
load
Connect the voltage according to the following table for current measurement in L2 or L3:
I: L1
Current transf. Terminals 2 5 8
L2 1 3 L2 L3 L1
L3 1 3 L3 L1 L2
2 5 1 3 2 5 1 3 2 5 1 3
u v
k l k l
U V
3-wire
L1 L1 L1
3-phase K L K L
L2 L2 L2
symmetric
load L3 L3 L3
Phase-shift
U: L1 L2 Connect the voltage according to the following table for current measurement in L2 or L3:
I: L1
Current transf. Terminals 2 5
L2 1 3 L2 L3
L3 1 3 L3 L1
8 2 1 3 8 2 1 3 8 2 1 3
u v
3-wire k l k l
3-phase U V
L1 L1 L1
symmetric K L K L
load L2 L2 L2
Phase-shift L3 L3 L3
U: L3 L1
I: L1
Connect the voltage according to the following table for current measurement in L2 or L3:
Current transf. Terminals 8 2
L2 1 3 L1 L2
L3 1 3 L2 L3
12 Data sheet DME 440-1 Le 09.03 Camille Bauer
SINEAX DME 440 with RS 485 interface
Programmable multi-transducer
Measuring inputs
System /
application Terminals
5 8 1 3 5 8 1 3 5 8 1 3
3-wire u v
3-phase k l k l
symmetric U V
L1 L1 L1
load K L K L
L2 L2 L2
Phase-shift
U: L2 L3 L3 L3 L3
I: L1
Connect the voltage according to the following table for current measurement in L2 or L3:
Current transf. Terminals 5 8
L2 1 3 L3 L1
L3 1 3 L1 L2
2 11 1 3 2 11 1 3 2 11 1 3
u v
k l k l
U V
4-wire
L1 L1 L1
3-phase K L K L
L2 L2 L2
symmetric
load L3 L3 L3
I: L1 N N N
Connect the voltage according to the following table for current measurement in L2 or L3:
Current transf. Terminals 2 11
L2 1 3 L2 N
L3 1 3 L3 N
2 5 8 1 3 7 9 2 5 8 1 3 7 9 2 5 8 1 3 7 9
u v u v
k l k l
U V U V
L1 L1 L1
K L k l K L k l
L2 L2 L2
3-wire L3 L3 L3
K L K L
3-phase
asymmetric 2 5 8 1 3 7 9
load u u u
x x x
X X X
k l
U U U
L1
K L k l
L2
L3 K L
Camille Bauer Data sheet DME 440-1 Le 09.03 13
SINEAX DME 440 with RS 485 interface
Programmable multi-transducer
Measuring inputs
System /
application Terminals
2 5 8 11 1 3 4 6 7 9 2 5 8 11 1 3 4 6 7 9
k l
k l
L1 L1
K L k l
L2 L2
K L
L3 L3
K L
4-wire N N
3-phase
asymmetric
2 5 8 11 1 3 4 6 7 9
load
u u u
x x x
X X X
k l
U U U k l
L1
K L k l
L2
K L
L3 3 single-pole insulated voltage transformers
K L
N in high-voltage system
1 2 3 4 5 6 7 8 9 11
2 8 11 1 3 4 6 7 9
u u
x x
4-wire X X
k
l
k l k l
k l
3-phase k l UU
asymmetric L1 L1
K L k l K L L
load, L2 L2
K L K L
Open Y L3 L3
connection K L K L
N N
2 single-pole insulated voltage transformers
Low-voltage system in high-voltage system
Relationship between PF, QF and LF
Output
ind. cap. ind. cap.
PF QF
180 90 0 90 180
LF
Fig. 5. Active power PF , reactive power QF ------,
outgoing incoming outgoing power factor LF - - .
14 Data sheet DME 440-1 Le 09.03 Camille Bauer
SINEAX DME 440 with RS 485 interface
Programmable multi-transducer
Connecting devices to the bus There is no bus termination required due to low data rate. If you got
problems when using long cables you can terminate the bus at
both ends with the characteristic impedance of the cable (normally
The RS 485 interface of the DME 440 is galvanically isolated from
about 120 ). Interface converters RS 232 RS 485 or RS 485
all other circuits. For an optimal data transmission the devices are
interface cards often have a built-in termination network which can
connected via a 3-wire cable, consisting of a twisted pair cable (for
be connected to the bus. The second impedance then can be
data lines) and a shield. There is no termination required. A shield
connected directly between the bus terminals of the device far most.
both prevents the coupling of external noise to the bus and limits
emissions from the bus. The shield must be connected to solid Fig. 6 shows the connection of transducers DME 440 to the
ground. MODBUS. The RS 485 interface can be realized by means of PC
built-in interface cards or interface converters. Both is shown using
You can connect up to 32 members to the bus (including master).
i.e. the interfaces 13601 and 86201 of W & T (Wiesemann & Theis
Basically devices of different manufacturers can be connected to
GmbH). They are configured for a 2-wire application with auto-
the bus, if they use the standard MODBUS protocol. Devices with-
matic control of data direction. These interfaces provide a galvani-
out galvanically isolated bus interface are not allowed to be con-
cal isolation and a built-in termination network.
nected to the shield.
The optimal topology for the bus is the daysi chain connection Important:
from node 1 to node 2 to node n. The bus must form a single
Each device connected to the bus must have a unique ad-
continuous path, and the nodes in the middle of the bus must have
dress
short stubs. Longer stubs would have a negative impact on signal
quality (reflexion at the end). A star or even ring topology is not All devices must be adjusted to the same baudrate.
allowed.
+5V
Master
26
GND 25
Slave 1
Tx-/Rx- 24
Tx+/Rx+ 23
Built-in RS485 interface card
5 SINEAX DME 440
Signal GND
1
Data Out A
6
Data Out B
2
Data In A 2z
7
Data In B
3 GND 2d
Handshake Out A Slave 2
8
Handshake Out B Tx-/Rx- 6z
4
Handshake In A
9 Tx+/Rx+ 6d
Handshake In B
PC with interface 13601 of W & T EURAX DME 440
With converter RS232/RS485
5 5
GND GND Signal GND
3 1
TxD Din Data Out A
2 6
RxD Dout Data Out B
2 26
Data In A
7
Data in B GND 25
4 3 Slave n
DTR Handshake Out A
6 8 Tx-/Rx- 24
DSR Handshake Out B
7 4
RTS Handshake In A Tx+/Rx+ 23
8 9
CTS Handshake In B
PC Interface 86201 of W & T SINEAX DME 440
Fig. 6
Camille Bauer Data sheet DME 440-1 Le 09.03 15
SINEAX DME 440 with RS 485 interface
Programmable multi-transducer
Dimensioned drawings Table 4: Accessories
15 16 17 18 19 20 21 22 23 24 25 26
Description Order No.
Programming cable 980 179
Configuration software DME 4 146 557
for SINEAX/EURAX DME 424, 440, 442,
157
150
SINEAX DME 400, 401 and 406
Windows 3.1x, 95, 98, NT and 2000
on CD in German, English, French,
Italian and Dutch
(Download free of charge under
1 2 3 4 5 6 7 8 9 11 13 14 http://www.camillebauer.com)
87.5 124 In addition, the CD contains all configuration
programmes presently available for Camille
Bauer products.
Fig. 7. SINEAX DME 440 in housing T24 clipped onto a top-hat rail Software METRAwin 10 / DME 440 128 373
(35 15 mm or 35 7.5 mm, acc. to EN 50 022). Operating Instructions DME 440-1 B d-f-e 127 127
19 6.5
4.5
15 16 17 18 19 20 21 22 23 24 25 26
150
181
165
Description Order No.
1 2 3 4 5 6 7 8 9 11 13 14
SINEAX A 200 154 063
12
87.5 123.4 Interconnecting cable 154 071
sub D 9 pol.
Fig. 8. SINEAX DME 440 in housing T24, screw hole mounting male/male 1.8 m
brackets pulled out.
Standard accessories
1 Operating Instructions for EURAX DME 440 in three languages:
German, French, English
1 blank type label, for recording programmed settings
1 Interface definition DME 440: German, French or English
Printed in Switzerland Subject to change without notice Edition 09.03 Data sheet No DME 440-1 Le
Camille Bauer LTD
Aargauerstrasse 7
CH-5610 Wohlen/Switzerland
Phone +41 56 618 21 11
Fax +41 56 618 24 58
e-mail: info@camillebauer.com
http://www.camillebauer.com
16 Data sheet DME 440-1 Le 09.03 Camille Bauer
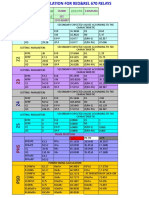
PROGRAMMING FOR SINEAX TYPE
SINEAX DMEDME
440440
with RS 485 interface
with 4 analogue outputs and bus interface RS 485 (MODBUS)
(see Data Sheet DME 440-1 Le, Table 3: Programming) Programmable multi-transducer
Customer / Agent: Date:
Order No. / Item: Delivery date:
No of instruments:
Type of instruments (marking):
1. Application
A System
2. Input voltage, rated value
U Ur =
3. Input current, rated value
V Ir =
4. Primary transformer
W CT = A/ A VT = kV / V
Output A
A A 5. Measured variable Type: X0 = X2 =
A B 6. Output signal Y0 = Y2 =
A C 7. Characteristic linear / bent X1 = Y1 =
A D 8. Limits Standard / Ymin = Ymax =
Output B
B A 9. Measured variable Type: X0 = X2 =
B B 10. Output signal Y0 = Y2 =
B C 11. Characteristic linear / bent X1 = Y1 =
B D 12. Limits Standard / Ymin = Ymax =
Output C
C A 13. Measured variable Type: X0 = X2 =
C B 14. Output signal Y0 = Y2 =
C C 15. Characteristic linear / bent X1 = Y1 =
C D 16. Limits Standard / Ymin = Ymax =
Output D
D A 17. Measured variable Type: X0 = X2 =
D B 18. Output signal Y0 = Y2 =
D C 19. Characteristic linear / bent X1 = Y1 =
D D 20. Limits Standard / Ymin = Ymax =
Continued on next page!
Camille Bauer Data sheet DME 440-1 Le 09.03 W 238917e
SINEAX DME 440 with RS 485 interface
Programmable multi-transducer
E A 21. Energy meter 1
F A 22. Energy meter 2
G A 23. Energy meter 3
H A 24. Energy meter 4
18 Data sheet DME 440-1 Le 09.03 Camille Bauer
You might also like
- Tdf-4-Mu - Time-Lag User Manual - enDocument36 pagesTdf-4-Mu - Time-Lag User Manual - enBilal WirkNo ratings yet
- REM 543 Motor Protection Relay: ApplicationDocument24 pagesREM 543 Motor Protection Relay: ApplicationPrateek SinghNo ratings yet
- HVR CTPU RangeDocument13 pagesHVR CTPU RangeSiva Prabu100% (1)
- p546 - Line Differential DistanceDocument15 pagesp546 - Line Differential DistancesaiNo ratings yet
- Metrosil Current Transformer Protection Units: June 2013 Page 1 of 3Document3 pagesMetrosil Current Transformer Protection Units: June 2013 Page 1 of 3Stephen Bridges100% (1)
- FREJA-Win eDocument8 pagesFREJA-Win eLeo BrooksNo ratings yet
- Generator Protection M 3430Document16 pagesGenerator Protection M 3430Eduardo AriasNo ratings yet
- ANSI Device NumbersDocument7 pagesANSI Device Numbersrajpre1213No ratings yet
- Sec Calc Fault Locator For Red Rel 670Document3 pagesSec Calc Fault Locator For Red Rel 670ZokiNo ratings yet
- Auxiliary Relays RXMB 1 RXMB 2 and RXMC 1Document12 pagesAuxiliary Relays RXMB 1 RXMB 2 and RXMC 1jenskg100% (1)
- 87t - Siemens 7ut 613 - 63xDocument695 pages87t - Siemens 7ut 613 - 63xMohd Ghazali Mohd NorNo ratings yet
- Unitrol FDocument8 pagesUnitrol FLeandro OsadzukNo ratings yet
- Dr. Samer Alsadi Department of Electrical Engineering & Technology PTU-KadoorieDocument13 pagesDr. Samer Alsadi Department of Electrical Engineering & Technology PTU-Kadoorieحسين ابو حامد100% (1)
- SIP5 - 7SA SD 84 86 7SL86 7SJ86 - V09.20 - Manual - C091 1 - enDocument2,268 pagesSIP5 - 7SA SD 84 86 7SL86 7SJ86 - V09.20 - Manual - C091 1 - enEuler Moraes dos Reis JuniorNo ratings yet
- CT Saturation Tolerance For 87L ApplicationsDocument26 pagesCT Saturation Tolerance For 87L ApplicationsBolivar Martinez100% (1)
- Ladder DiagramDocument17 pagesLadder DiagramItsMeRyanCNo ratings yet
- ABB REM Relay Unit Software Manual CAP 505Document102 pagesABB REM Relay Unit Software Manual CAP 505mitch1973100% (1)
- 7SD522 CalculationDocument8 pages7SD522 Calculationrajasekar thangarajNo ratings yet
- Beckwith M 3425ADocument482 pagesBeckwith M 3425AJohnLT092No ratings yet
- Phasor Measurement UnitsDocument2 pagesPhasor Measurement Unitsbijumt5No ratings yet
- Xmer TestingDocument91 pagesXmer TestingSush SonkNo ratings yet
- Insulation Resistance TestingDocument3 pagesInsulation Resistance TestingAJB2010No ratings yet
- Micom P740: Numerical Busbar ProtectionDocument386 pagesMicom P740: Numerical Busbar ProtectionDinh Xuan Duyet100% (1)
- Breaker Failure Protection BFPDocument2 pagesBreaker Failure Protection BFPGeorge AsuncionNo ratings yet
- Red 670Document28 pagesRed 670Mahmoud Shafie100% (1)
- CIRED2015 0448 Final PDFDocument5 pagesCIRED2015 0448 Final PDFRolando Henry Flores CamavilcaNo ratings yet
- Busbar Protection: Dinesh Kumar Sarda A.Manager (MRSS)Document30 pagesBusbar Protection: Dinesh Kumar Sarda A.Manager (MRSS)karthikNo ratings yet
- ABB Auxiliary Signalling and Trippning Relays RXMA 1 RXMA 2 RXMS 1 RXSF 1 RXME 1 RXME 18 RXMH 2 RXMDocument20 pagesABB Auxiliary Signalling and Trippning Relays RXMA 1 RXMA 2 RXMS 1 RXSF 1 RXME 1 RXME 18 RXMH 2 RXMNeelakandan MasilamaniNo ratings yet
- Autocoordination of Protection Settings of Series ReclosersDocument4 pagesAutocoordination of Protection Settings of Series ReclosersSe SamnangNo ratings yet
- ES2648 Grounding Req Rev - NC 10Document1 pageES2648 Grounding Req Rev - NC 10Ikhuosho AbodeNo ratings yet
- Site Test Report: 1. Relay CharacteristicsDocument17 pagesSite Test Report: 1. Relay CharacteristicsAnonymous dH3DIEtzNo ratings yet
- T PRO 4000 Manual PDFDocument406 pagesT PRO 4000 Manual PDFAnonymous 3mzzF5C100% (1)
- 7SJ66 IEC 61850 MappingDocument144 pages7SJ66 IEC 61850 Mappingsougata mukherjee100% (1)
- Installation ManualDocument6 pagesInstallation ManualReji KurianNo ratings yet
- Directional Over Current Relay (67) - Numerical RelaysDocument12 pagesDirectional Over Current Relay (67) - Numerical RelaysAbdus SalamNo ratings yet
- The Dangers of DC High Voltage Test For XLPE Cables at SiteDocument4 pagesThe Dangers of DC High Voltage Test For XLPE Cables at SiteLTE002No ratings yet
- ANSI CodeDocument4 pagesANSI CodeNurul MukhlisiahNo ratings yet
- Procedure For TAPCON260: Prepared By: A.Rafeek, Testing EngineerDocument18 pagesProcedure For TAPCON260: Prepared By: A.Rafeek, Testing EngineerMuhammad NasirNo ratings yet
- Trignometry MaluDocument55 pagesTrignometry MalusdrtfgNo ratings yet
- Radial Feeder ProtectionDocument26 pagesRadial Feeder ProtectionLeo GaghanNo ratings yet
- ABB Relay REPAIRSDocument11 pagesABB Relay REPAIRSdarsu NaikNo ratings yet
- Multifunction Digital Relays For Generator ProtectionDocument10 pagesMultifunction Digital Relays For Generator Protectionfreddy riveraNo ratings yet
- Capacitor Voltage TransformerDocument1 pageCapacitor Voltage Transformerdeep_sparklingNo ratings yet
- General Line Protection: List of TopicsDocument104 pagesGeneral Line Protection: List of TopicsMeghavahina100% (1)
- E L RelayDocument31 pagesE L RelayBal SubramaniNo ratings yet
- Commissioning Numerical RelaysDocument24 pagesCommissioning Numerical RelaysVHMANOHARNo ratings yet
- DME440Document18 pagesDME440IvegaNo ratings yet
- SINEAX DME 424/442 Programmable Multi-TransducersDocument21 pagesSINEAX DME 424/442 Programmable Multi-TransducersSwathi SunkaraboinaNo ratings yet
- Rish Ducer M40Document15 pagesRish Ducer M40rijoNo ratings yet
- 45 OrionIO Datasheet 111422Document2 pages45 OrionIO Datasheet 111422marceloNo ratings yet
- Operating Manual: Power / Phase Angle / Power Factor TransducerDocument44 pagesOperating Manual: Power / Phase Angle / Power Factor TransducerpadmawarNo ratings yet
- Standard RS-485Document11 pagesStandard RS-485Suryakanth KattimaniNo ratings yet
- QAS 4xx1 TD EN V1-0 2CDC512102D0211Document6 pagesQAS 4xx1 TD EN V1-0 2CDC512102D0211Carlos BotelloNo ratings yet
- 12-Bit 200 KSPS Complete Sampling ADC AD678 : Input ImpedanceDocument14 pages12-Bit 200 KSPS Complete Sampling ADC AD678 : Input ImpedanceMohammad UsmanNo ratings yet
- SINEAX M561 / M562 / M563 With 1, 2 Resp. 3 Analog Outputs Programmable Multi-Transducer For IndustryDocument18 pagesSINEAX M561 / M562 / M563 With 1, 2 Resp. 3 Analog Outputs Programmable Multi-Transducer For IndustryRafael PaivaNo ratings yet
- Signalwandler SK.1A-1S1D2RS enDocument4 pagesSignalwandler SK.1A-1S1D2RS enGabriel VarelaNo ratings yet
- Data Acquisition Using INS8048: National Semiconductor Application Note 281 Daniel Hagerty November 1981Document6 pagesData Acquisition Using INS8048: National Semiconductor Application Note 281 Daniel Hagerty November 1981Beroxi MihaiNo ratings yet
- Advanced ProtectionDocument13 pagesAdvanced ProtectionPacoNo ratings yet
- Tiger 5 Unit 1 Evaluation RubricDocument4 pagesTiger 5 Unit 1 Evaluation RubricPacoNo ratings yet
- Question: What Can I Do If The Device Is in MONITOR? AnswerDocument2 pagesQuestion: What Can I Do If The Device Is in MONITOR? AnswerPacoNo ratings yet
- Quest 5Document33 pagesQuest 5ROSTROMONDROLLONo ratings yet
- Advanced ProtectionDocument210 pagesAdvanced Protectionxy_123100% (4)
- Manual 7sd610 V40a1 en PDFDocument502 pagesManual 7sd610 V40a1 en PDFPacoNo ratings yet
- T60man-S3 Version Firmware 5.5 Con Funcion 21 PDFDocument572 pagesT60man-S3 Version Firmware 5.5 Con Funcion 21 PDFPacoNo ratings yet
- Ret670 At-At-Mt Asignacion LedsDocument2 pagesRet670 At-At-Mt Asignacion LedsPacoNo ratings yet
- Manual ProtectionDocument188 pagesManual Protectionjpregio100% (3)
- Ret670 At-At-Mt Asignacion LedsDocument2 pagesRet670 At-At-Mt Asignacion LedsPacoNo ratings yet
- L90 Catalogo ResumidoDocument4 pagesL90 Catalogo ResumidoPacoNo ratings yet
- Manual L90Document462 pagesManual L90PacoNo ratings yet
- InstallationhelpWinREG3 8 01032010Document6 pagesInstallationhelpWinREG3 8 01032010PacoNo ratings yet
- Dme 401Document13 pagesDme 401PacoNo ratings yet
- T60man-S3 Version Firmware 5.5 Con Funcion 21 PDFDocument572 pagesT60man-S3 Version Firmware 5.5 Con Funcion 21 PDFPacoNo ratings yet
- L90 Catalogo ResumidoDocument4 pagesL90 Catalogo ResumidoPacoNo ratings yet
- UME MultitransTCP EngDocument29 pagesUME MultitransTCP EngPacoNo ratings yet
- Ume Pd500 EngDocument189 pagesUme Pd500 EngPacoNo ratings yet
- T60man-S1 Version Firmware 5.2Document474 pagesT60man-S1 Version Firmware 5.2PacoNo ratings yet
- L90 Catalogo ResumidoDocument4 pagesL90 Catalogo ResumidoPacoNo ratings yet
- Manual L90Document462 pagesManual L90PacoNo ratings yet
- Release Note MiCOM S1 Studio V4.0.1Document10 pagesRelease Note MiCOM S1 Studio V4.0.1anil4shopNo ratings yet
- UME Multitrans Basico EngDocument35 pagesUME Multitrans Basico EngPacoNo ratings yet
- UME Multitrans Avanzado EngDocument39 pagesUME Multitrans Avanzado EngPacoNo ratings yet
- 7SD610 Line Diff Protn Relay Version 4.0Document502 pages7SD610 Line Diff Protn Relay Version 4.0vseenivasan_6No ratings yet
- 7SD5xx Manual A3 V044100 en PDFDocument752 pages7SD5xx Manual A3 V044100 en PDFPacoNo ratings yet
- DRS3.2 With Advantx Console: Revision 3Document144 pagesDRS3.2 With Advantx Console: Revision 3Adam MalzewskiNo ratings yet
- Alnagrat 2021 J. Phys. Conf. Ser. 1874 012031Document18 pagesAlnagrat 2021 J. Phys. Conf. Ser. 1874 012031Sruthi ViswanathanNo ratings yet
- Module 3 Intro To SimplexDocument36 pagesModule 3 Intro To SimplexMohan BollaNo ratings yet
- Creo Parametric Toolkit 2.0 Release Notes: December 2015Document42 pagesCreo Parametric Toolkit 2.0 Release Notes: December 2015satishnamalaNo ratings yet
- Ericsson RBS 2000Document2 pagesEricsson RBS 2000sonchoy170% (1)
- NewsDocument605 pagesNewsХося МинNo ratings yet
- Re - How To Link SQL Server To Labview With Database Toolkit - NI Community - National InstrumentsDocument1 pageRe - How To Link SQL Server To Labview With Database Toolkit - NI Community - National InstrumentsdesignselvaNo ratings yet
- Changeling C 20 GeneratorDocument12 pagesChangeling C 20 Generators.winyardNo ratings yet
- AnsKey SQP2 CS XII T2 2022 YKDocument7 pagesAnsKey SQP2 CS XII T2 2022 YKTanishqNo ratings yet
- Assignment 3Document4 pagesAssignment 3Dark RebelNo ratings yet
- LogDocument33 pagesLogSarmen ChaogoNo ratings yet
- Q3 Week2 Custom AnimationDocument28 pagesQ3 Week2 Custom AnimationEmee Grace RamonalNo ratings yet
- Chapter 1 - IntroductionDocument21 pagesChapter 1 - IntroductionGudata GechoNo ratings yet
- Os MicroprojectDocument12 pagesOs MicroprojectDeep BagrechaNo ratings yet
- Scouting Players With FIFA19: Data Driven Approach To ScoutingDocument3 pagesScouting Players With FIFA19: Data Driven Approach To ScoutingMauricio PeñalozaNo ratings yet
- Motoman BAsic ProgrammingDocument320 pagesMotoman BAsic ProgrammingJuan Pedro Tobias Vzkz VillanuevaNo ratings yet
- Book - Security Color en PDFDocument404 pagesBook - Security Color en PDFzeeshanNo ratings yet
- Invoice TemplateDocument7 pagesInvoice TemplateRaghu DayearNo ratings yet
- 3 GSM Voice Quality Influence Factors Troubleshooting Methods and Tools DeliverablesDocument33 pages3 GSM Voice Quality Influence Factors Troubleshooting Methods and Tools DeliverablesRidwan CrraNo ratings yet
- Atari ST InternalsDocument472 pagesAtari ST InternalsKarlson2009No ratings yet
- Lab Assignment - 5 Informational Security Analysis and AuditDocument10 pagesLab Assignment - 5 Informational Security Analysis and AuditpuneethNo ratings yet
- Digital Transformation of Local Government: A Case Study From GreeceDocument10 pagesDigital Transformation of Local Government: A Case Study From GreeceDaniela Gabriela CazanNo ratings yet
- MTC OD 365 Fundamentals MS-900 0420Document2 pagesMTC OD 365 Fundamentals MS-900 0420João InácioNo ratings yet
- Advanced Database System Syllabus 03212021Document9 pagesAdvanced Database System Syllabus 03212021Emarre BaronNo ratings yet
- Almond Enterprises: Quotation No.Document2 pagesAlmond Enterprises: Quotation No.sushanta chowdhuryNo ratings yet
- Google Search Operators Cheat Sheet: by SemrushDocument6 pagesGoogle Search Operators Cheat Sheet: by SemrushEmma BrooksNo ratings yet
- 840Dsl 828D Iso Dialects FCT Man en-USDocument204 pages840Dsl 828D Iso Dialects FCT Man en-USFLAVIONo ratings yet
- Fundamental of Programming Chapter 1Document46 pagesFundamental of Programming Chapter 1Jennifer Jimenez100% (1)
- MineSched NotesDocument18 pagesMineSched NotesRobert Nyirenda100% (1)
- Ricardo Crivelli - LaravelDocument23 pagesRicardo Crivelli - LaravelRicoCrivelliNo ratings yet