You might also like
- Mecânica Técnica e Resistência Dos Materiais 1MN Aulas 06 e 07 - Tensão, Alongamento e DeformaçãoDocument33 pagesMecânica Técnica e Resistência Dos Materiais 1MN Aulas 06 e 07 - Tensão, Alongamento e DeformaçãoVinicius Cunha100% (2)
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Original DECLARAÇÃO Informal de AluguelDocument2 pagesOriginal DECLARAÇÃO Informal de Aluguelwildemann100% (3)
- Aula Santa Ceia DepinDocument2 pagesAula Santa Ceia Depindanitranoster8512100% (1)
- Condicionador de Ar Central. Self Contained - Bax - BWXDocument20 pagesCondicionador de Ar Central. Self Contained - Bax - BWXaks74100% (1)
- Exercicios CircuitosMagneticosDocument4 pagesExercicios CircuitosMagneticosTiago Michel HoffmannNo ratings yet
- Aula 01 - Pontes e ViadutosDocument151 pagesAula 01 - Pontes e ViadutosBruna Delavy da Silva67% (3)
- 06 - Semelhança de Triângulos - ExerciciosDocument3 pages06 - Semelhança de Triângulos - ExerciciosMilena Monteiro100% (3)
- Anexo Sem Título 00082Document11 pagesAnexo Sem Título 00082Everton DuarteNo ratings yet
- Concurso CEITECDocument22 pagesConcurso CEITECdanitranoster8512No ratings yet
- Pe 19 2015 ImpugnacaoDocument41 pagesPe 19 2015 Impugnacaodanitranoster8512No ratings yet
- Manual KodakDocument106 pagesManual KodakSilva DjalmaNo ratings yet
- Aquasnap30RH ManualDocument36 pagesAquasnap30RH ManualNeilor PaivaNo ratings yet
- Edital 78 2020 Selecao CLI 2021 1Document20 pagesEdital 78 2020 Selecao CLI 2021 1danitranoster8512No ratings yet
- Nova Lei de Licitacoes e Contratos AdministrativosDocument148 pagesNova Lei de Licitacoes e Contratos AdministrativosÁlvaro Jr.50% (2)
- Meu RedentorDocument1 pageMeu Redentordanitranoster8512No ratings yet
- Coro Kids AvivaDocument4 pagesCoro Kids Avivadanitranoster8512No ratings yet
- IHMOP-RASAR035 Rev02 Nov2013 - InverterDocument44 pagesIHMOP-RASAR035 Rev02 Nov2013 - InverterFelipe RodrigoNo ratings yet
- Sistema Agua GeladaDocument22 pagesSistema Agua GeladaElias Barros de FigueiredoNo ratings yet
- 2 Avaliação Curso GabineteDocument5 pages2 Avaliação Curso Gabinetedanitranoster8512No ratings yet
- Mãe MãeDocument1 pageMãe Mãedanitranoster8512No ratings yet
- Notas de Aula 2016Document103 pagesNotas de Aula 2016danitranoster8512No ratings yet
- DicaDocument50 pagesDicaVinicius UcelliNo ratings yet
- 3 Avaliação Curso GabineteDocument1 page3 Avaliação Curso Gabinetedanitranoster8512No ratings yet
- Curso ILB Poder Legislativo MunicipalDocument8 pagesCurso ILB Poder Legislativo Municipaldanitranoster8512No ratings yet
- Lei Organica Maracanau 2016Document89 pagesLei Organica Maracanau 2016danitranoster8512No ratings yet
- Apostila Completa Organização de Gabinete ParlamentarDocument118 pagesApostila Completa Organização de Gabinete Parlamentardanitranoster8512No ratings yet
- Aula 10 Pid Via Lugar Das RaizesDocument41 pagesAula 10 Pid Via Lugar Das Raizesdanitranoster8512No ratings yet
- Tutorial LogixProDocument21 pagesTutorial LogixProantonsuwantoNo ratings yet
- Curso ILB Poder Legislativo MunicipalDocument8 pagesCurso ILB Poder Legislativo Municipaldanitranoster8512No ratings yet
- Exp3 Acionamentos IDocument56 pagesExp3 Acionamentos Idanitranoster8512No ratings yet
- PPA Municipal 12 PassosDocument24 pagesPPA Municipal 12 Passosdanitranoster8512No ratings yet
- PCC Eng Mecatrônica-Gestão e Controle Da Qualidade-CEME.159Document2 pagesPCC Eng Mecatrônica-Gestão e Controle Da Qualidade-CEME.159danitranoster8512No ratings yet
- Modelo Projeto Pivict 2012-2013Document12 pagesModelo Projeto Pivict 2012-2013ilkesamarNo ratings yet
- Artigo Sobre Norma API 579 - Consulta ImportanteDocument25 pagesArtigo Sobre Norma API 579 - Consulta ImportanteElidene LavaredaNo ratings yet
- Palestra 5 Elementos de Economia e GestaoDocument12 pagesPalestra 5 Elementos de Economia e GestaoApvs WamaritaNo ratings yet
- Balança de Precisão Com Strain Gages PDFDocument12 pagesBalança de Precisão Com Strain Gages PDFElaine Cristina BritoNo ratings yet
- Comentários Física UlissesDocument2 pagesComentários Física UlissesjuniorNo ratings yet
- Aula2-Diferenciação 02.03.2021Document5 pagesAula2-Diferenciação 02.03.2021Jonathan Cantini BackNo ratings yet
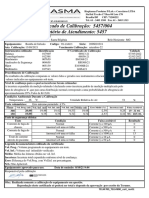
- Certificado de Calibração: 5457/004 Relatório de Atendimento: 5457Document1 pageCertificado de Calibração: 5457/004 Relatório de Atendimento: 5457Engenharia Clínica HC-UFMGNo ratings yet
- Caderno Técnico PROCIV 9 PDFDocument28 pagesCaderno Técnico PROCIV 9 PDFsbranquinhoNo ratings yet
- Roteiro Aula 01 - Viscosímetro de StokesDocument5 pagesRoteiro Aula 01 - Viscosímetro de StokesDanilo G AlmeidaNo ratings yet
- Atividade Hoje 8 Ano 29 02Document1 pageAtividade Hoje 8 Ano 29 02Gilberto SilvaNo ratings yet
- Trilha de MatemáticaDocument2 pagesTrilha de Matemáticaerlon dantas da nobrega100% (1)
- 2178 7045 1 PBDocument14 pages2178 7045 1 PBMatheus de SouzaNo ratings yet
- Plano de Acao PEIDocument6 pagesPlano de Acao PEILuiz Fabiano BonettiNo ratings yet
- Ebook 07 ReologiaDocument4 pagesEbook 07 ReologiaBianca PeradellesNo ratings yet
- Ex4 ModelosDocument3 pagesEx4 ModelosGabriel Henrique BritoNo ratings yet
- Especificacao Accu Chek ComboDocument8 pagesEspecificacao Accu Chek ComboCassiano Ricardo GeromelNo ratings yet
- Lista Exercícios Teorema de PitágorasDocument1 pageLista Exercícios Teorema de PitágorasBeatrizNo ratings yet
- Atividade Equação Do 2º Grau MatemáticaDocument1 pageAtividade Equação Do 2º Grau MatemáticaCarlos Edilon100% (1)
- Apostila Curso RessonânciaDocument41 pagesApostila Curso RessonânciaHerick Savione82% (17)
- Exercício Função (Todas)Document21 pagesExercício Função (Todas)João MarcosNo ratings yet
- Monografia: Monografia: Números Complexos: Universidade Estadua Universidade Estadual de Campinas L de CampinasDocument7 pagesMonografia: Monografia: Números Complexos: Universidade Estadua Universidade Estadual de Campinas L de CampinasLeandroNo ratings yet
- TD de Matemática - Aula 13 - Frente 1 - Versao 3Document18 pagesTD de Matemática - Aula 13 - Frente 1 - Versao 3leonardNo ratings yet
- Revisa Goiás 3 Mat MaioDocument94 pagesRevisa Goiás 3 Mat MaioJorge Lucas100% (1)
- Prática Cinética IDocument2 pagesPrática Cinética IEnrique FerreiraNo ratings yet
- A Regra de Cramer É Uma Das Maneiras de Resolver Um Sistema LinearDocument16 pagesA Regra de Cramer É Uma Das Maneiras de Resolver Um Sistema Linearanon-507802100% (5)
- Produtividade Fabril IDocument23 pagesProdutividade Fabril IFrancismilton TelesNo ratings yet