You might also like
- Florida Motor Fuel Tax Relief Act of 2022Document9 pagesFlorida Motor Fuel Tax Relief Act of 2022ABC Action NewsNo ratings yet
- Sap EwmDocument2 pagesSap EwmsirivirishiNo ratings yet
- Excitation Control of The Synchronous Generator PDFDocument7 pagesExcitation Control of The Synchronous Generator PDFvelasquuez1993100% (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Bosch Injectors and OhmsDocument6 pagesBosch Injectors and OhmsSteve WrightNo ratings yet
- Pursuit of Performance Findings From The 2014 Miller Heiman Sales Best Practices StudyDocument37 pagesPursuit of Performance Findings From The 2014 Miller Heiman Sales Best Practices StudyLoredanaNo ratings yet
- A Digital-Based Optimal AVR Design of Synchronous Generator Exciter Using LQR TechniqueDocument13 pagesA Digital-Based Optimal AVR Design of Synchronous Generator Exciter Using LQR Technique3KaiserENo ratings yet
- Manual - Rapid Literacy AssessmentDocument16 pagesManual - Rapid Literacy AssessmentBaldeo PreciousNo ratings yet
- The Adoption of e Procurement in Tanzani PDFDocument5 pagesThe Adoption of e Procurement in Tanzani PDFDangyi GodSeesNo ratings yet
- Antenna Azimuth Position Control System Using PIDDocument12 pagesAntenna Azimuth Position Control System Using PIDAyumuNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Djagarov EEEIC 2012Document6 pagesDjagarov EEEIC 2012jagarov4954No ratings yet
- Unit-Iv Small-Signal Stability Analysis With ControllersDocument37 pagesUnit-Iv Small-Signal Stability Analysis With Controllershabte gebreial shrashrNo ratings yet
- Transient Stability Improvement Using Upfc and SVCDocument8 pagesTransient Stability Improvement Using Upfc and SVCSai Bhargav VeerabathiniNo ratings yet
- Novel Space Vector Based Current Controllers For PWM-InvertersDocument9 pagesNovel Space Vector Based Current Controllers For PWM-InvertersVlad GabrielNo ratings yet
- Eee 1Document3 pagesEee 1Mustafa AlhumayreNo ratings yet
- Performance Comparison Between SVC and STATCOM For Reactive Power Compensation by Using Fuzzy Logic ControllerDocument4 pagesPerformance Comparison Between SVC and STATCOM For Reactive Power Compensation by Using Fuzzy Logic ControllerShiva PaddamNo ratings yet
- Online Control of SVC Using ANN Based Pole Placement ApproachDocument5 pagesOnline Control of SVC Using ANN Based Pole Placement ApproachAbdo AliNo ratings yet
- Current Mode Controller Design For Single Phase Grid Connected Inverter Using Proportional Resonant Control StrategyDocument6 pagesCurrent Mode Controller Design For Single Phase Grid Connected Inverter Using Proportional Resonant Control StrategyijeteeditorNo ratings yet
- Comparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveDocument8 pagesComparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveMatanAbutbulNo ratings yet
- IEEE Power System Paper-Analysis of Power System Linearized Model With STATCOM Based Damping StabilizerDocument7 pagesIEEE Power System Paper-Analysis of Power System Linearized Model With STATCOM Based Damping StabilizerAnoop MathewNo ratings yet
- Power System Dynamic Performance With STATCOM Controller: Mfareed@kfupm - Edu.sa Ahrahim@kfupm - Edu.saDocument5 pagesPower System Dynamic Performance With STATCOM Controller: Mfareed@kfupm - Edu.sa Ahrahim@kfupm - Edu.sapragatinareshNo ratings yet
- Comparative Study of Different Control Strategies For DstatcomDocument7 pagesComparative Study of Different Control Strategies For DstatcomAmmuRaNo ratings yet
- Gupta 2017Document6 pagesGupta 2017lutterford18No ratings yet
- A Comparative Study of Several Control Techniques Applied To A Boost ConverterDocument8 pagesA Comparative Study of Several Control Techniques Applied To A Boost ConverterSerhat GümüşNo ratings yet
- Modeling and Simulation of Static Var CoDocument3 pagesModeling and Simulation of Static Var Cotran duyNo ratings yet
- 11 Robust Control of 2 Level12 PulseDocument7 pages11 Robust Control of 2 Level12 PulseRavi JainNo ratings yet
- GA For Optimal PI in DC Voltage Regulation of D-STATCOMDocument9 pagesGA For Optimal PI in DC Voltage Regulation of D-STATCOMShipra PandeyNo ratings yet
- Torsional PssDocument6 pagesTorsional PssPablo RubenNo ratings yet
- The Effect of SVC-FACTS Controller On Power System Oscillation Damping ControlDocument5 pagesThe Effect of SVC-FACTS Controller On Power System Oscillation Damping ControlKamran KhanNo ratings yet
- Transient Stability Enhancement Using Self Adjusting-Flexible Variable Series Capacitor CompensationDocument7 pagesTransient Stability Enhancement Using Self Adjusting-Flexible Variable Series Capacitor CompensationVenkata Krishna ReddyNo ratings yet
- A PI Controller Based On Gain-Scheduling For Synchronous GeneratorDocument11 pagesA PI Controller Based On Gain-Scheduling For Synchronous GeneratoratirinaNo ratings yet
- Pole-Placement Designs of Power System StabilizersDocument7 pagesPole-Placement Designs of Power System StabilizersabelcatayNo ratings yet
- Influences of Excitation Systems On The Dynamic Voltage Behavior of Power SystemsDocument8 pagesInfluences of Excitation Systems On The Dynamic Voltage Behavior of Power SystemsJimmy Tacca ApazaNo ratings yet
- Paper1ga Final PDFDocument5 pagesPaper1ga Final PDFJismNo ratings yet
- A D-Q Synchronous Frame Controller For Single Phase InverterDocument7 pagesA D-Q Synchronous Frame Controller For Single Phase InvertershanNo ratings yet
- 03 Definition - Classification of Power System Stability IEEE-CIGRE Joint Task Force On Stability Terms and DefinitionsDocument63 pages03 Definition - Classification of Power System Stability IEEE-CIGRE Joint Task Force On Stability Terms and DefinitionsRosa Elvira Montalvo MartínezNo ratings yet
- Investigation of Three-Phase Grid-Connected Inverter For Photovoltaic ApplicationDocument6 pagesInvestigation of Three-Phase Grid-Connected Inverter For Photovoltaic ApplicationAmran MaulanaNo ratings yet
- Automatic Voltage Regulator For Synchronous GeneratorDocument7 pagesAutomatic Voltage Regulator For Synchronous GeneratorGnanaseharan ArunachalamNo ratings yet
- Stabilization of Gird Connected Wind Generator During Power Network Disturbances by StatcomDocument5 pagesStabilization of Gird Connected Wind Generator During Power Network Disturbances by StatcomAmit DebnathNo ratings yet
- Performance Analysis of A Single-Phase Ac Voltage Controller Under Induction Motor LoadDocument8 pagesPerformance Analysis of A Single-Phase Ac Voltage Controller Under Induction Motor LoadInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Design of A Fuzzy Logic Controller Based STATCOM For IEEEDocument6 pagesDesign of A Fuzzy Logic Controller Based STATCOM For IEEEharini shivNo ratings yet
- DC Motor DrivesDocument35 pagesDC Motor DrivesMahua ChandaNo ratings yet
- Robust Nonlinear Controller Design For Transient Stability Enhancement of Power SystemsDocument6 pagesRobust Nonlinear Controller Design For Transient Stability Enhancement of Power Systemsshaban sattiNo ratings yet
- The International Journal of Engineering and Science (The IJES)Document5 pagesThe International Journal of Engineering and Science (The IJES)theijesNo ratings yet
- SSSC - Static Synchronous Series Compensa PDFDocument4 pagesSSSC - Static Synchronous Series Compensa PDFhuskeeNo ratings yet
- Reactive Power ControlDocument73 pagesReactive Power Controlمحمد سليمانNo ratings yet
- Matrix Converter Control SystemDocument4 pagesMatrix Converter Control SystemRatnesh JainNo ratings yet
- Stability Improvement Based On Power System Stabilizer and Static VAR CompensatorDocument7 pagesStability Improvement Based On Power System Stabilizer and Static VAR Compensatormahesh_pattabhi038No ratings yet
- Control System Practical (Eec376) V Semester, B. Tech. (EE)Document5 pagesControl System Practical (Eec376) V Semester, B. Tech. (EE)uttamNo ratings yet
- Speed Regulation and Torque Ripple Minimization of Induction Motor by DTC With PI and Fuzzy Logic ControllerDocument6 pagesSpeed Regulation and Torque Ripple Minimization of Induction Motor by DTC With PI and Fuzzy Logic ControllerVijay KumarNo ratings yet
- Determination of Suitable Locations For Power System Stabilizers and Static Var Compensators For Damping of Electromechanical Oscillations in Large Scale Power SystemsDocument9 pagesDetermination of Suitable Locations For Power System Stabilizers and Static Var Compensators For Damping of Electromechanical Oscillations in Large Scale Power SystemsSherif HelmyNo ratings yet
- STATCOM Control For Power System Voltage Control ApplicationsDocument7 pagesSTATCOM Control For Power System Voltage Control ApplicationssirageldeenNo ratings yet
- Power System Stability Enhancement With Genetically Optimized SVC ControllerDocument6 pagesPower System Stability Enhancement With Genetically Optimized SVC ControllertinazdrilicNo ratings yet
- Windows-1256 00349655Document8 pagesWindows-1256 00349655enmnabilNo ratings yet
- Power System Stabilizer Controller Design For SMIB Stability StudyDocument6 pagesPower System Stabilizer Controller Design For SMIB Stability StudyNurfuadi AsshehanNo ratings yet
- Improving The Power Quality by MLCI Type DSTATCOM: P. Manoj Kumar Y. Sumanth S. N. V. GaneshDocument5 pagesImproving The Power Quality by MLCI Type DSTATCOM: P. Manoj Kumar Y. Sumanth S. N. V. GaneshsarathNo ratings yet
- Indirect Control Techniques For Cascaded Multilevel Inverter (CMLI) STATCOM:A ReviewDocument4 pagesIndirect Control Techniques For Cascaded Multilevel Inverter (CMLI) STATCOM:A ReviewRavinder RangaNo ratings yet
- Improved Power Quality For Renewable Power Generation Systems Presence of Non-Linear LoadsDocument6 pagesImproved Power Quality For Renewable Power Generation Systems Presence of Non-Linear LoadsPhanikumar Bellam KondaNo ratings yet
- Optimal Control of Frequency and Voltage Variations Using PID SeeDocument6 pagesOptimal Control of Frequency and Voltage Variations Using PID SeeMushtaq Najeeb AhmedNo ratings yet
- Reduction of Torque Ripple in DTC For Induction Motor Using Input-Output Feedback LinearizationDocument14 pagesReduction of Torque Ripple in DTC For Induction Motor Using Input-Output Feedback LinearizationChengyu NiuNo ratings yet
- IEEE Power System Paper-Investigation of Voltage Regulation Stability of Static Synchronous CompensatorDocument6 pagesIEEE Power System Paper-Investigation of Voltage Regulation Stability of Static Synchronous CompensatorAnoop MathewNo ratings yet
- Elektrotehniski Vestnik/Electrotechnical ReviewDocument6 pagesElektrotehniski Vestnik/Electrotechnical ReviewMykola SemenyukNo ratings yet
- DC-Link Voltage Control of A Single-Phase Photovoltaic InverterDocument6 pagesDC-Link Voltage Control of A Single-Phase Photovoltaic Invertertinhmaixatoi2006No ratings yet
- Kart HiDocument11 pagesKart HiSivas SubramaniyanNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- RLocus - Analysis - Design 4 PDFDocument1 pageRLocus - Analysis - Design 4 PDFas dds aaadNo ratings yet
- Book 289Document1 pageBook 289as dds aaadNo ratings yet
- Root Locus Analysis & Design: A Designer Would LikeDocument1 pageRoot Locus Analysis & Design: A Designer Would Likeas dds aaadNo ratings yet
- RLocus Analysis Design 5Document1 pageRLocus Analysis Design 5as dds aaadNo ratings yet
- Book 291Document1 pageBook 291as dds aaadNo ratings yet
- RLocus Analysis Design 2Document1 pageRLocus Analysis Design 2as dds aaadNo ratings yet
- RLocus Analysis Design 3Document1 pageRLocus Analysis Design 3as dds aaadNo ratings yet
- Book 290Document1 pageBook 290as dds aaadNo ratings yet
- Book 286Document1 pageBook 286as dds aaadNo ratings yet
- Book 283Document1 pageBook 283as dds aaadNo ratings yet
- Book 287Document1 pageBook 287as dds aaadNo ratings yet
- Book 288Document1 pageBook 288as dds aaadNo ratings yet
- Book 284Document1 pageBook 284as dds aaadNo ratings yet
- Book 282Document1 pageBook 282as dds aaadNo ratings yet
- Book 279Document1 pageBook 279as dds aaadNo ratings yet
- Book 277Document1 pageBook 277as dds aaadNo ratings yet
- Book 281Document1 pageBook 281as dds aaadNo ratings yet
- Book 285Document1 pageBook 285as dds aaadNo ratings yet
- Book 280Document1 pageBook 280as dds aaadNo ratings yet
- Fig. 7.23d Chap. 9 Table 4.1: 1 2 D 2 1 2 2 N 2 2 N 2 NDocument1 pageFig. 7.23d Chap. 9 Table 4.1: 1 2 D 2 1 2 2 N 2 2 N 2 Nas dds aaadNo ratings yet
- PaperC - 7148 3Document1 pagePaperC - 7148 3as dds aaadNo ratings yet
- Book 278Document1 pageBook 278as dds aaadNo ratings yet
- PaperC - 7148 4Document1 pagePaperC - 7148 4as dds aaadNo ratings yet
- Pages From Scan006Document6 pagesPages From Scan006as dds aaadNo ratings yet
- MR1531 TabsDocument1 pageMR1531 Tabssdsds-54No ratings yet
- Y (VTI), U (VR) (VT VM), A, B,: TE +TC Ekgkc (09) KikakekDocument1 pageY (VTI), U (VR) (VT VM), A, B,: TE +TC Ekgkc (09) Kikakekas dds aaadNo ratings yet
- MR1531 AppdDocument2 pagesMR1531 Appdsdsds-54No ratings yet
- Abbreviations and Acronyms: Fundamentals of Power System EconomicsDocument1 pageAbbreviations and Acronyms: Fundamentals of Power System Economicsas dds aaadNo ratings yet
- MR1531 PrefDocument2 pagesMR1531 Prefsdsds-54No ratings yet
- Barack ObamaDocument3 pagesBarack ObamaVijay KumarNo ratings yet
- Demonstration of Preprocessing On Dataset Student - Arff Aim: This Experiment Illustrates Some of The Basic Data Preprocessing Operations That Can BeDocument4 pagesDemonstration of Preprocessing On Dataset Student - Arff Aim: This Experiment Illustrates Some of The Basic Data Preprocessing Operations That Can BePavan Sankar KNo ratings yet
- Mi Account ေက်ာ္နည္းDocument16 pagesMi Account ေက်ာ္နည္းamk91950% (2)
- Advanced Work Packaging: A Fit For Purpose ApproachDocument17 pagesAdvanced Work Packaging: A Fit For Purpose Approachhafidz bandungNo ratings yet
- LITERARY THEORY BY TERRY EAGLETON NotesDocument6 pagesLITERARY THEORY BY TERRY EAGLETON NotesPrachi SharmaNo ratings yet
- The Genius of Marie Curie Shohini GhoseDocument4 pagesThe Genius of Marie Curie Shohini GhoseMarta HrynyovskaNo ratings yet
- Gilbert Cell Design PDFDocument22 pagesGilbert Cell Design PDFvysNo ratings yet
- 2SA1016Document4 pages2SA1016catalina maryNo ratings yet
- Overview of MEMDocument5 pagesOverview of MEMTudor Costin100% (1)
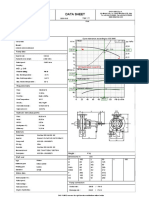
- Data Sheet: Item N°: Curve Tolerance According To ISO 9906Document3 pagesData Sheet: Item N°: Curve Tolerance According To ISO 9906Aan AndianaNo ratings yet
- 2014 Abidetal. TheoreticalPerspectiveofCorporateGovernance BulletinofBusinessDocument11 pages2014 Abidetal. TheoreticalPerspectiveofCorporateGovernance BulletinofBusinessOne PlusNo ratings yet
- AE HM6L-72 Series 430W-450W: Half Large CellDocument2 pagesAE HM6L-72 Series 430W-450W: Half Large CellTaso GegiaNo ratings yet
- 05-11 Trainer Interview QuestionsDocument8 pages05-11 Trainer Interview QuestionsqulaityNo ratings yet
- DSynchronize (ENG)Document3 pagesDSynchronize (ENG)Rekha Rajarajan100% (1)
- Hunger Games Mini Socratic Seminar2012Document4 pagesHunger Games Mini Socratic Seminar2012Cary L. TylerNo ratings yet
- FS-C8025MFP Release NotesDocument22 pagesFS-C8025MFP Release NotesFirmware SM-SHNo ratings yet
- 37270a QUERCUS GBDocument6 pages37270a QUERCUS GBMocanu Romeo-CristianNo ratings yet
- WallthicknessDocument1 pageWallthicknessGabriela MotaNo ratings yet
- EE360 - Magnetic CircuitsDocument48 pagesEE360 - Magnetic Circuitsبدون اسمNo ratings yet
- Integration Plan Grade 9 Mapeh SeptemberDocument3 pagesIntegration Plan Grade 9 Mapeh Septemberbernie evaristo bacsaNo ratings yet
- OOPS KnowledgeDocument47 pagesOOPS KnowledgeLakshmanNo ratings yet
- Contoh Label Sensus 2022Document313 pagesContoh Label Sensus 2022Ajenk SablackNo ratings yet
- ER288 090714 5082 CV OKP (089) Method Statement For Plate Baring TestDocument3 pagesER288 090714 5082 CV OKP (089) Method Statement For Plate Baring TestWr ArNo ratings yet
- IFN 554 Week 3 Tutorial v.1Document19 pagesIFN 554 Week 3 Tutorial v.1kitkataus0711No ratings yet