You might also like
- Feedback Control of Dynamic SystemsDocument33 pagesFeedback Control of Dynamic SystemsPanayiotis PapadopoulosNo ratings yet
- 2D Euler Riemann RoeDocument72 pages2D Euler Riemann RoeJRNo ratings yet
- Matlab Course BrochureDocument8 pagesMatlab Course Brochuresakshi_singh_25No ratings yet
- MitDocument182 pagesMitJRNo ratings yet
- 9.stability AnalysisDocument57 pages9.stability AnalysisDharmalingam Velayutham100% (3)
- Ee 693 Lab Manual Final Control System 2Document42 pagesEe 693 Lab Manual Final Control System 2KumarNo ratings yet
- Software Engineering 3DX3 Slides 2: Modelling in The Frequency DomainDocument94 pagesSoftware Engineering 3DX3 Slides 2: Modelling in The Frequency DomainNicolas Quispe AguilarNo ratings yet
- HMWK 1Document2 pagesHMWK 1Eren Can KızıldağNo ratings yet
- ECM3711 - Nonlinear Systems and Control: M¨ δ P − D ˙δ − η E τ ˙ E EDocument1 pageECM3711 - Nonlinear Systems and Control: M¨ δ P − D ˙δ − η E τ ˙ E EMuhammad Sohaib ShahidNo ratings yet
- Some Past Exam Problems in Control Systems - Part 1Document5 pagesSome Past Exam Problems in Control Systems - Part 1vigneshNo ratings yet
- 1993an Augmented Form For Generalized State Space SystemsDocument6 pages1993an Augmented Form For Generalized State Space SystemsKhushboo Akhil MaheshwariNo ratings yet
- Suggested Solution To Past Papers PDFDocument20 pagesSuggested Solution To Past Papers PDFMgla AngelNo ratings yet
- Poles Selection TheoryDocument6 pagesPoles Selection TheoryRao ZubairNo ratings yet
- Assignment 4Document3 pagesAssignment 4Zain NadeemNo ratings yet
- ps3 (1) From MAE 4780Document5 pagesps3 (1) From MAE 4780fooz10No ratings yet
- ECE 415, Fall 2003 Problem Set #1: Issued: September 2nd Due: September 9thDocument2 pagesECE 415, Fall 2003 Problem Set #1: Issued: September 2nd Due: September 9thsolteanNo ratings yet
- Series de PuseuixDocument13 pagesSeries de PuseuixGabrielBenícioNo ratings yet
- Elec9731 LM2Document44 pagesElec9731 LM2wyx840927627No ratings yet
- Chapter 8: Introduction To Systems Control: 8.1 System Stability From Pole-Zero Locations (S-Domain)Document47 pagesChapter 8: Introduction To Systems Control: 8.1 System Stability From Pole-Zero Locations (S-Domain)Sreedharachary SimhaaNo ratings yet
- Decentralized PD Nonlinear Control: RobotDocument6 pagesDecentralized PD Nonlinear Control: RobotDaniel Alvarado MejiaNo ratings yet
- Tutorial III Root Locus DesignDocument25 pagesTutorial III Root Locus Designapi-3856083100% (3)
- Controller Design Using Root Locus: 14.1 PD ControlDocument11 pagesController Design Using Root Locus: 14.1 PD Controlasalifew belachewNo ratings yet
- 6 LQ, LQG, H, H Control System Design: 6.1 LQ: Linear Systems With Quadratic Performance Cri-TeriaDocument22 pages6 LQ, LQG, H, H Control System Design: 6.1 LQ: Linear Systems With Quadratic Performance Cri-TeriaAli AzanNo ratings yet
- Nahp1 2020 PDFDocument4 pagesNahp1 2020 PDFVangheli TVNo ratings yet
- S6 Ei DSP May2014Document3 pagesS6 Ei DSP May2014shilpa.1595No ratings yet
- Ca Array 9 16Document8 pagesCa Array 9 16Manjunath RamachandraNo ratings yet
- Control HW 2Document20 pagesControl HW 2kajolNo ratings yet
- Periodic Compensation of Continuous-Time PlantsDocument7 pagesPeriodic Compensation of Continuous-Time PlantsAkila Krishnankutty PadmalathaNo ratings yet
- 9 State Variable Approach (Continuous Systems) : AdvantagesDocument76 pages9 State Variable Approach (Continuous Systems) : AdvantagesNina ButtNo ratings yet
- Chapter 3Document32 pagesChapter 3LEE LEE LAUNo ratings yet
- Chapter 4Document39 pagesChapter 4Joseph IbrahimNo ratings yet
- Time Response of Systems: 10.1 Some Standard Time ResponsesDocument8 pagesTime Response of Systems: 10.1 Some Standard Time ResponseskiranNo ratings yet
- Bernal 2014 First Mode DampingDocument32 pagesBernal 2014 First Mode DampingSergio David Valle PeñalverNo ratings yet
- Systems Control Laboratory: ECE557F LAB2: Controller Design Using Pole Placement and Full Order ObserversDocument6 pagesSystems Control Laboratory: ECE557F LAB2: Controller Design Using Pole Placement and Full Order ObserversColinSimNo ratings yet
- 2 Denis Mosconi - RevisadoDocument8 pages2 Denis Mosconi - RevisadoDenis MosconiNo ratings yet
- Automatic Control III Homework Assignment 3 2015Document4 pagesAutomatic Control III Homework Assignment 3 2015salimNo ratings yet
- LQRDocument14 pagesLQRStefania Oliveira100% (1)
- Kon407E - State Space Methods in Control Systems Homework # 3Document2 pagesKon407E - State Space Methods in Control Systems Homework # 3T KaripNo ratings yet
- Automatic Control - ExercisesDocument140 pagesAutomatic Control - Exerciseshasan bishNo ratings yet
- Controls Problems For Qualifying Exam - Spring 2014: Problem 1Document11 pagesControls Problems For Qualifying Exam - Spring 2014: Problem 1MnshNo ratings yet
- MATH3968 Lecture 2: DR Emma Carberry 29 July 2009Document5 pagesMATH3968 Lecture 2: DR Emma Carberry 29 July 2009TOM DAVISNo ratings yet
- H Design of Controllers Ensuring The Regulation of Currents of The Decoupled Field Orientation Control Applied To A Pms MotorDocument9 pagesH Design of Controllers Ensuring The Regulation of Currents of The Decoupled Field Orientation Control Applied To A Pms MotorSidahmed LarbaouiNo ratings yet
- One and A Half HoursDocument6 pagesOne and A Half HoursMHUM84No ratings yet
- Adaptive Reduced-Order Control of Discrete Repetitive Processes With Iteration-Varying Reference SignalsDocument6 pagesAdaptive Reduced-Order Control of Discrete Repetitive Processes With Iteration-Varying Reference Signalssharifabd omarNo ratings yet
- Chapter 6 - The Stability of Linear Feedback PDFDocument71 pagesChapter 6 - The Stability of Linear Feedback PDFHei Kan ChengNo ratings yet
- 6.003 Homework 3: ProblemsDocument4 pages6.003 Homework 3: ProblemsIsrael SmithNo ratings yet
- pw2 SolDocument10 pagespw2 Soltwee tomasNo ratings yet
- Advanced Control Theory (Eee)Document3 pagesAdvanced Control Theory (Eee)Adarsh VkNo ratings yet
- Nonlinear Dynamics-And-Chaos-StrogatzDocument9 pagesNonlinear Dynamics-And-Chaos-Strogatzali.sahebiNo ratings yet
- Chap 9Document5 pagesChap 9apratim.chatterjiNo ratings yet
- Mathematical Tripos: at The End of The ExaminationDocument27 pagesMathematical Tripos: at The End of The ExaminationDedliNo ratings yet
- An Lmi Approach For Designing Sliding Mode ObserversDocument6 pagesAn Lmi Approach For Designing Sliding Mode Observerst123medNo ratings yet
- Sliding Mode Control of HAVE DASH IIDocument5 pagesSliding Mode Control of HAVE DASH IIManuel SolisNo ratings yet
- Signals and Systems Laboratory 7Document9 pagesSignals and Systems Laboratory 7Kthiha CnNo ratings yet
- Control Systems LAB # 8 Design Via Root Locus: Example: Find The Root Locus For The T.F Matlab CodeDocument6 pagesControl Systems LAB # 8 Design Via Root Locus: Example: Find The Root Locus For The T.F Matlab CodeiyerrohitNo ratings yet
- Practice Exam QuestionsDocument3 pagesPractice Exam QuestionsBrendanNo ratings yet
- K01603 - 20190413172609 - Lecture Note - Chapter 3 PDFDocument32 pagesK01603 - 20190413172609 - Lecture Note - Chapter 3 PDFSHARIFAH NUR ARISHIA WAN HAZAMINo ratings yet
- 1 Modeling of First Order Systems and Response Analysis 2Document8 pages1 Modeling of First Order Systems and Response Analysis 2arslanNo ratings yet
- Assignment 1Document2 pagesAssignment 1Joe NguyenNo ratings yet
- Tutorial 6Document3 pagesTutorial 6Gaurav ANo ratings yet
- HW 02 PDFDocument3 pagesHW 02 PDFQFTWNo ratings yet
- Lab3 v2Document10 pagesLab3 v2Pranshumaan SinghNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- FrameSLAM - From Bundle Adjustment To Realtime Visual MappingDocument11 pagesFrameSLAM - From Bundle Adjustment To Realtime Visual MappingJRNo ratings yet
- A Short Derivation To Basic Rotation Around The X-, Y-Or Z-AxisDocument4 pagesA Short Derivation To Basic Rotation Around The X-, Y-Or Z-AxisJRNo ratings yet
- Tristan Perez' Ching-Yawtzeng" Graham Goodwin'"Document6 pagesTristan Perez' Ching-Yawtzeng" Graham Goodwin'"JRNo ratings yet
- Rotation DerivationDocument3 pagesRotation DerivationJRNo ratings yet
- Turbulence ModelingDocument66 pagesTurbulence ModelingJRNo ratings yet
- ProjectDocument24 pagesProjectJRNo ratings yet
- LQRDocument14 pagesLQRStefania Oliveira100% (1)
- 0 - Front MatterDocument21 pages0 - Front MatterJRNo ratings yet
- 3 - Decision ProblemsDocument19 pages3 - Decision ProblemsJRNo ratings yet
- Adv EctionDocument72 pagesAdv EctionJRNo ratings yet
- Presentation 1Document1 pagePresentation 1JRNo ratings yet
- Is US Economic Growth Over Faltering Innovation Confronts The Six Headwinds PDFDocument25 pagesIs US Economic Growth Over Faltering Innovation Confronts The Six Headwinds PDFObi-Wan KenobiNo ratings yet
- Programming Project 05: Assignment OverviewDocument4 pagesProgramming Project 05: Assignment OverviewPrateekNo ratings yet
- Op 1Document18 pagesOp 1mohammad thamerNo ratings yet
- Performance of P-Only, PI and PID ControllersDocument21 pagesPerformance of P-Only, PI and PID ControllersantavenaNo ratings yet
- Lect 1 - Intro To Automatic Control PDFDocument15 pagesLect 1 - Intro To Automatic Control PDFYota KimireNo ratings yet
- (Ebook) Tuning of Fuzzy Pid Controllers PDFDocument22 pages(Ebook) Tuning of Fuzzy Pid Controllers PDFJessica VélezNo ratings yet
- Advanced Counting Techniques: With Question/Answer AnimationsDocument69 pagesAdvanced Counting Techniques: With Question/Answer AnimationsAmishNo ratings yet
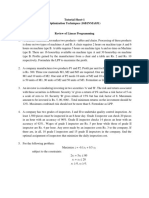
- Tutorial Sheet-1 Optimization Techniques (16B1NMA831)Document2 pagesTutorial Sheet-1 Optimization Techniques (16B1NMA831)NITIN SHARMANo ratings yet
- معامل تضخم التباين PDFDocument19 pagesمعامل تضخم التباين PDFAmani100% (1)
- Speech Emotion Recognition Using Deep Learning Techniques: A ReviewDocument19 pagesSpeech Emotion Recognition Using Deep Learning Techniques: A ReviewAkhila RNo ratings yet
- Time Delay EstimationDocument36 pagesTime Delay EstimationSithick MohamedNo ratings yet
- Session 7 (Algorithms)Document32 pagesSession 7 (Algorithms)LukaNo ratings yet
- Topic 3b Simple Linear RegressionDocument17 pagesTopic 3b Simple Linear Regressionshaibu amanaNo ratings yet
- Estabilidad Lyapunov EjerciciosDocument6 pagesEstabilidad Lyapunov EjerciciosGustavo Omar Mesones MálagaNo ratings yet
- Scaling and Bandwidth-Parameterization Based Controller TuningDocument8 pagesScaling and Bandwidth-Parameterization Based Controller Tuninghamza mesaiNo ratings yet
- Chapter-8 (Lag Lead Compensation)Document16 pagesChapter-8 (Lag Lead Compensation)Nischal MaharjanNo ratings yet
- EC004 OutputDynamics - Microfoundation 2022 Lecture3Document15 pagesEC004 OutputDynamics - Microfoundation 2022 Lecture3Titu SinghNo ratings yet
- GametheoryDocument20 pagesGametheorywisnu prajogoNo ratings yet
- Machine Learning - Stanford University - CourseraDocument16 pagesMachine Learning - Stanford University - CourseraDaniel FloresNo ratings yet
- Fenics Discontinuous GalerkinDocument20 pagesFenics Discontinuous GalerkinNishant PandaNo ratings yet
- Neural Networks Question BankDocument42 pagesNeural Networks Question BankJosphat OtienoNo ratings yet
- 1 s2.0 S1319157821002068 MainDocument13 pages1 s2.0 S1319157821002068 Mainabdul jawadNo ratings yet
- Digital Control Systems KDS PDFDocument77 pagesDigital Control Systems KDS PDFSudip MondalNo ratings yet
- A Machine Learning Approach For Tracking and Predicting Student Performance in Degree ProgramsDocument12 pagesA Machine Learning Approach For Tracking and Predicting Student Performance in Degree ProgramsAnnie Diaz VargasNo ratings yet
- IEC 62351-4 Security Implementations For IEC 61850 MMS MessagesDocument7 pagesIEC 62351-4 Security Implementations For IEC 61850 MMS MessagesreynaldorxNo ratings yet
- Advanced Robotics - IRO-2005-LectureDocument176 pagesAdvanced Robotics - IRO-2005-LectureIvan AvramovNo ratings yet
- Numerical Methods in Engineering Lab (ME-319) : ManualsDocument8 pagesNumerical Methods in Engineering Lab (ME-319) : ManualsajayinstyleNo ratings yet
- Lab 1 ReportDocument7 pagesLab 1 ReportShawn Sagar100% (1)
- Grupo B Essay of The Article "Statistical Mechanics and Thermodynamics: A Maxwellian View"Document5 pagesGrupo B Essay of The Article "Statistical Mechanics and Thermodynamics: A Maxwellian View"Juan Camilo GeredaNo ratings yet