You might also like
- Optimal Control On SO (3) : SO (3) Is Non-Euclidean SpaceDocument2 pagesOptimal Control On SO (3) : SO (3) Is Non-Euclidean SpaceMahmoudAbdulGalilNo ratings yet
- Unit 2Document8 pagesUnit 2MahmoudAbdulGalilNo ratings yet
- A Guide To Understanding Battery SpecificationsDocument3 pagesA Guide To Understanding Battery SpecificationswijayanataNo ratings yet
- Burgard09iros PDFDocument7 pagesBurgard09iros PDFMahmoudAbdulGalilNo ratings yet
- Msc/Diploma/Certificate Module Stochastic Simulation Unit 3 - Stochastic IntegralsDocument4 pagesMsc/Diploma/Certificate Module Stochastic Simulation Unit 3 - Stochastic IntegralsMahmoudAbdulGalilNo ratings yet
- Performance Bounds For Cooperative Simultaneous Localization and Mapping (C-SLAM)Document8 pagesPerformance Bounds For Cooperative Simultaneous Localization and Mapping (C-SLAM)MahmoudAbdulGalilNo ratings yet
- CHPDocument7 pagesCHPMahmoudAbdulGalilNo ratings yet
- SGBM: Semi-Global Block Matching: Pixel Matching (Pixel Blocks Matching)Document4 pagesSGBM: Semi-Global Block Matching: Pixel Matching (Pixel Blocks Matching)MahmoudAbdulGalilNo ratings yet
- Aly 11 MultipleDocument4 pagesAly 11 MultipleMahmoudAbdulGalilNo ratings yet
- SCE Curriculum June30thDocument16 pagesSCE Curriculum June30thMahmoudAbdulGalilNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Daftar PustakaDocument2 pagesDaftar PustakaAnsmunandarNo ratings yet
- CBSE Tuts: NCERT Class 10 Science Lab Manual - Image Formation by A Convex LensDocument16 pagesCBSE Tuts: NCERT Class 10 Science Lab Manual - Image Formation by A Convex LensVinodKumarTummalurNo ratings yet
- FP A08e15 Od01 - DS - 0 0 5 PDFDocument2 pagesFP A08e15 Od01 - DS - 0 0 5 PDFYura DankoNo ratings yet
- PreAssessment Quadratic Unit Multiple ChoiceDocument13 pagesPreAssessment Quadratic Unit Multiple ChoiceJoby ChenNo ratings yet
- Hilti Submittal PDFDocument762 pagesHilti Submittal PDFMahmoud GwailyNo ratings yet
- Transportation Engineering Lab ManualDocument42 pagesTransportation Engineering Lab ManualSubzar BhatNo ratings yet
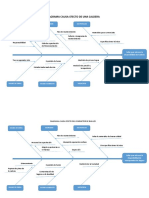
- Caldera causa-efecto diagrama mantenimiento fallasDocument2 pagesCaldera causa-efecto diagrama mantenimiento fallasDaniel Will Morales GuerreroNo ratings yet
- Magnetic Field and Magnetic Effects of Current: Assignment 2Document2 pagesMagnetic Field and Magnetic Effects of Current: Assignment 2HaRryNo ratings yet
- Fundamentals of Photoelastic Stress AnalysisDocument48 pagesFundamentals of Photoelastic Stress AnalysiserickNo ratings yet
- Advances in Phased Array Compound S-Scan DesignDocument18 pagesAdvances in Phased Array Compound S-Scan Designhcmcrlho100% (1)
- Year 9 Unit 9 Forces in ActionDocument5 pagesYear 9 Unit 9 Forces in ActionCatherine ChanNo ratings yet
- Matrix Acidizing Course PDFDocument74 pagesMatrix Acidizing Course PDFBehzad Hosseinzadeh100% (1)
- COT Science 6 Q3 DLP-simple Machine - PPTX Version 1Document75 pagesCOT Science 6 Q3 DLP-simple Machine - PPTX Version 1Bryan Bangiban83% (18)
- OMAE2018 ProgramDocument124 pagesOMAE2018 ProgramTahsin TezdoganNo ratings yet
- Experiment 08 Simple PendulumDocument8 pagesExperiment 08 Simple PendulumAnonymous rswF6CNo ratings yet
- Homogeneous CoordinatesDocument27 pagesHomogeneous CoordinatesGogyNo ratings yet
- Ubc 2011 Fall Vakili SoheylDocument193 pagesUbc 2011 Fall Vakili Soheyl조기현No ratings yet
- Pre-Final Examination in General Physics 1, 12 Grade "On All My Work, My Name Affirms My Honor"Document2 pagesPre-Final Examination in General Physics 1, 12 Grade "On All My Work, My Name Affirms My Honor"Oliver VillanuevaNo ratings yet
- Pelton Wheel Lab Report Revised SDocument12 pagesPelton Wheel Lab Report Revised STalha100% (1)
- Lab Report 2Document3 pagesLab Report 2ChristianNo ratings yet
- Fossen - Chapter 3: Strain in RocksDocument41 pagesFossen - Chapter 3: Strain in RocksbuhlejoyNo ratings yet
- Science of Releasing: An Introduction To The 4-Stage Release RundownDocument46 pagesScience of Releasing: An Introduction To The 4-Stage Release Rundownalkaro288% (8)
- Numerical Methods in Rock MechanicsDocument24 pagesNumerical Methods in Rock Mechanicsali100% (2)
- CO2 Car Project Workbook 2010 ENGDocument178 pagesCO2 Car Project Workbook 2010 ENGhamidhard100% (2)
- Algebra PDFDocument2 pagesAlgebra PDFpalle sandhyaNo ratings yet
- Rotation and RevolutionDocument9 pagesRotation and Revolutionaditya senNo ratings yet
- United Institute of Technology: B-Tech (En Vii SEM-2014-15) Lecture PlanDocument2 pagesUnited Institute of Technology: B-Tech (En Vii SEM-2014-15) Lecture PlanRudra Kumar MishraNo ratings yet
- CAESAR II MAX Combination LoadCaseDocument2 pagesCAESAR II MAX Combination LoadCasePrashant ChauhanNo ratings yet
- Synthesis of AspirinDocument3 pagesSynthesis of AspirinShoomyla RashidNo ratings yet
- Reviews Synta (120 MM F8.3 and 150 MM F5) .Document1 pageReviews Synta (120 MM F8.3 and 150 MM F5) .Giannis TheodorouNo ratings yet