You might also like
- CFT Approach to the Kondo EffectDocument46 pagesCFT Approach to the Kondo EffectOliver BardinNo ratings yet
- CH01Document46 pagesCH01Alejandro CarbajalNo ratings yet
- Coupled pendulum differential equationDocument3 pagesCoupled pendulum differential equationHong Chul NamNo ratings yet
- SHM NotesDocument4 pagesSHM Notesgiulio.zizzo2850No ratings yet
- Townsend, Quantum Physics, CHAP - 3, Schodinger EqDocument24 pagesTownsend, Quantum Physics, CHAP - 3, Schodinger EqElcan DiogenesNo ratings yet
- Wave equation examples summaryDocument8 pagesWave equation examples summaryaminNo ratings yet
- 2te Bereicht EntwurfDocument15 pages2te Bereicht EntwurfmandbackNo ratings yet
- Applications of 2nd-Order Differential EquationsDocument18 pagesApplications of 2nd-Order Differential EquationsNurNo ratings yet
- Mm3Cmt Computer Modelling: TechniquesDocument23 pagesMm3Cmt Computer Modelling: TechniquesTim WongNo ratings yet
- Classical & Quantum Harmonic OscillatorsDocument4 pagesClassical & Quantum Harmonic OscillatorsFredrick MutungaNo ratings yet
- Fourier Analysis: Representing Continuous SignalsDocument79 pagesFourier Analysis: Representing Continuous SignalsRajkumarNo ratings yet
- J. R. Herring Et Al - Statistical and Dynamical Questions in Strati Ed TurbulenceDocument23 pagesJ. R. Herring Et Al - Statistical and Dynamical Questions in Strati Ed TurbulenceWhiteLighteNo ratings yet
- INTRODUCTION TO DYNAMIC ANALYSIS OF SIMPLE STRUCTURESDocument37 pagesINTRODUCTION TO DYNAMIC ANALYSIS OF SIMPLE STRUCTURESyuchunieNo ratings yet
- Complex WavesDocument4 pagesComplex WavesGodwin LarryNo ratings yet
- Understand the Wiener-Khinchin theorem and its applications in physicsDocument10 pagesUnderstand the Wiener-Khinchin theorem and its applications in physicsMD Hasnain AnsariNo ratings yet
- The Demise of Classical PhysicsDocument5 pagesThe Demise of Classical Physicsapi-126160455No ratings yet
- Lecture 18Document6 pagesLecture 18captainhassNo ratings yet
- Paper2 Influence Variable Surface Tension Capillary GravityDocument14 pagesPaper2 Influence Variable Surface Tension Capillary Gravityersin_ozugurluNo ratings yet
- PhysicsDocument6 pagesPhysicsharryp3542No ratings yet
- PH2210: Quantum Mechanics: Physics Department, Royal Holloway, University of LondonDocument5 pagesPH2210: Quantum Mechanics: Physics Department, Royal Holloway, University of LondonPhyo ThihaNo ratings yet
- Schrodinger Wave Equatio ProofDocument147 pagesSchrodinger Wave Equatio ProofBIKRAM PALNo ratings yet
- Plane Waves and Wave Propagation: Augustin Jean Fresnel (1788 - 1827) November 9, 2001Document58 pagesPlane Waves and Wave Propagation: Augustin Jean Fresnel (1788 - 1827) November 9, 2001Simon RugenyiNo ratings yet
- Fourier Series and Transforms Explained for Chemistry ApplicationsDocument11 pagesFourier Series and Transforms Explained for Chemistry ApplicationsSafiun NaharNo ratings yet
- MP13 Quantum Mechanics 2Document40 pagesMP13 Quantum Mechanics 2Ahmad Fikry IskandarNo ratings yet
- HSChapter3 PDFDocument38 pagesHSChapter3 PDFShweta SridharNo ratings yet
- An Elementary Proof of Dyson's Power Counting Theorem HAHN ZIMMERMANNDocument13 pagesAn Elementary Proof of Dyson's Power Counting Theorem HAHN ZIMMERMANNPfister jeanNo ratings yet
- Emil Akhmedov - General Relativity Notes PDFDocument102 pagesEmil Akhmedov - General Relativity Notes PDFJudol Alejandro Rodriguez FrancoNo ratings yet
- David Morin - WavesDocument272 pagesDavid Morin - Wavesc1074376No ratings yet
- QFT BoccioDocument63 pagesQFT Bocciounima3610No ratings yet
- 6.7 Introduction Dynamics in Three Dimensions A. General PrinciplesDocument12 pages6.7 Introduction Dynamics in Three Dimensions A. General PrincipleselvyNo ratings yet
- Fourier Transform PDFDocument7 pagesFourier Transform PDFAhmed EdrisNo ratings yet
- T Huene BergDocument14 pagesT Huene BergMartín FigueroaNo ratings yet
- MIT OCW Wave Propagation Lecture Part 3Document47 pagesMIT OCW Wave Propagation Lecture Part 3Mohan NayakaNo ratings yet
- Spring Mass EffectDocument4 pagesSpring Mass EffectScott WhitmireNo ratings yet
- Coriolis Acceleration Is FicticiousDocument5 pagesCoriolis Acceleration Is FicticiousJoseph StanovskyNo ratings yet
- The Heavy Spring at Work: Amelia Carolina SparavignaDocument8 pagesThe Heavy Spring at Work: Amelia Carolina SparavignaXaviSalvadorNo ratings yet
- Direct numerical simulation of particle detachmentDocument14 pagesDirect numerical simulation of particle detachmentAntonio Martín AlcántaraNo ratings yet
- The Kondo EffectDocument8 pagesThe Kondo Effectmarcalomar19No ratings yet
- Superconductor_TheoryDocument28 pagesSuperconductor_TheoryIronman SpidermanNo ratings yet
- M15 Mazu0536 01 Ism C15Document22 pagesM15 Mazu0536 01 Ism C15Luphumlo GolelaNo ratings yet
- PH127 Lectures Nov. 2022 4Document212 pagesPH127 Lectures Nov. 2022 4dicksonjohnxpNo ratings yet
- SDOFDocument30 pagesSDOFb ramachandraNo ratings yet
- Drift-Diffusion Model: Introduction: Dragica VasileskaDocument9 pagesDrift-Diffusion Model: Introduction: Dragica VasileskaLê Văn TrungNo ratings yet
- Three problems on mass transfer diffusion processesDocument15 pagesThree problems on mass transfer diffusion processesPasha Tan100% (1)
- Chap7 Schrodinger Equation 1D Notes s12Document14 pagesChap7 Schrodinger Equation 1D Notes s12arwaNo ratings yet
- Equation of Fluid MotionDocument7 pagesEquation of Fluid MotionMohammedRafficNo ratings yet
- Dynamics Tutorial 11-Damped Vibrations-13p PDFDocument13 pagesDynamics Tutorial 11-Damped Vibrations-13p PDFmanfredm6435100% (1)
- Wave Forces on Small Diameter Structural MembersDocument25 pagesWave Forces on Small Diameter Structural Members금동민No ratings yet
- EM Waves in Material Media: 1 Wave PropagationDocument8 pagesEM Waves in Material Media: 1 Wave PropagationDinesh RamuNo ratings yet
- 2.57 Nano-to-Macro Transport Processes Fall 2004:) N N N N (NDocument8 pages2.57 Nano-to-Macro Transport Processes Fall 2004:) N N N N (NcaptainhassNo ratings yet
- Quantum Mechanics Time EvolutionDocument11 pagesQuantum Mechanics Time Evolutiongiovanny_francisNo ratings yet
- Oscillations2007 PDFDocument11 pagesOscillations2007 PDFaldo costradaNo ratings yet
- 0.1 Conservation of Momentum and The Maxwell Stress TensorDocument8 pages0.1 Conservation of Momentum and The Maxwell Stress TensorBen RobertsNo ratings yet
- What's Important: Time-Independent Schrödinger EquationDocument5 pagesWhat's Important: Time-Independent Schrödinger Equationombraga1896No ratings yet
- Statistical Mechanics Lecture Notes (2006), L5Document11 pagesStatistical Mechanics Lecture Notes (2006), L5OmegaUserNo ratings yet
- Frequency Response Analysis: Karl D. Hammond January 2008Document14 pagesFrequency Response Analysis: Karl D. Hammond January 2008Trixie NuylesNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- El 104 Roof Floor PlanDocument1 pageEl 104 Roof Floor Plankhawaldeh jamalNo ratings yet
- El 103 First Floor PlanDocument1 pageEl 103 First Floor Plankhawaldeh jamalNo ratings yet
- El 102 Ground Floor PlanDocument1 pageEl 102 Ground Floor Plankhawaldeh jamalNo ratings yet
- m105 Generla Details Ac LayoutDocument1 pagem105 Generla Details Ac Layoutkhawaldeh jamalNo ratings yet
- g002 Green Building DeclarationDocument1 pageg002 Green Building Declarationkhawaldeh jamalNo ratings yet
- El 101 Setting Out PlanDocument1 pageEl 101 Setting Out Plankhawaldeh jamalNo ratings yet
- El 105 Typical Installation DetailsDocument1 pageEl 105 Typical Installation Detailskhawaldeh jamalNo ratings yet
- m107 U Factory Sheet-2Document1 pagem107 U Factory Sheet-2khawaldeh jamalNo ratings yet
- M104 Thermal Load Schedule PDFDocument1 pageM104 Thermal Load Schedule PDFkhawaldeh jamalNo ratings yet
- M105 Generla Details Ac Layout PDFDocument1 pageM105 Generla Details Ac Layout PDFkhawaldeh jamalNo ratings yet
- m106 U Factory Sheet-1Document1 pagem106 U Factory Sheet-1khawaldeh jamalNo ratings yet
- m104 Thermal Load ScheduleDocument1 pagem104 Thermal Load Schedulekhawaldeh jamalNo ratings yet
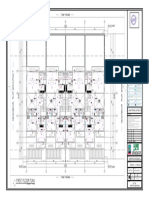
- LPG 103 First Floor PlanDocument1 pageLPG 103 First Floor Plankhawaldeh jamalNo ratings yet
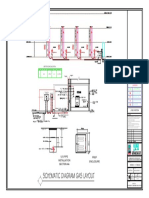
- LPG 106 Schematic Diagram Gas Layout PDFDocument1 pageLPG 106 Schematic Diagram Gas Layout PDFkhawaldeh jamal100% (1)
- Green Building General Notes SummaryDocument1 pageGreen Building General Notes Summarykhawaldeh jamalNo ratings yet
- P 104 First Floor PlanDocument1 pageP 104 First Floor Plankhawaldeh jamalNo ratings yet
- g002 Green Building DeclarationDocument1 pageg002 Green Building Declarationkhawaldeh jamalNo ratings yet
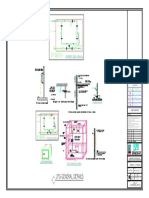
- LPG 107 LPG General DetailsDocument1 pageLPG 107 LPG General Detailskhawaldeh jamalNo ratings yet
- P 109 Fic LocationDocument1 pageP 109 Fic Locationkhawaldeh jamalNo ratings yet
- LPG 104 Terrace Floor PlanDocument1 pageLPG 104 Terrace Floor Plankhawaldeh jamalNo ratings yet
- LPG 102 Ground Floor PlanDocument1 pageLPG 102 Ground Floor Plankhawaldeh jamalNo ratings yet
- LPG 106 Schematic Diagram Gas LayoutDocument1 pageLPG 106 Schematic Diagram Gas Layoutkhawaldeh jamal0% (1)
- LPG 103 First Floor PlanDocument1 pageLPG 103 First Floor Plankhawaldeh jamalNo ratings yet
- P 106 Roof Floor Plan Water SupplyDocument1 pageP 106 Roof Floor Plan Water Supplykhawaldeh jamalNo ratings yet
- P 102 Ground Floor PlanDocument1 pageP 102 Ground Floor Plankhawaldeh jamalNo ratings yet
- P 002 Drainage General NotesDocument1 pageP 002 Drainage General Noteskhawaldeh jamalNo ratings yet
- P 107 Stair Case Head Room Roof Floor PlanDocument1 pageP 107 Stair Case Head Room Roof Floor Plankhawaldeh jamalNo ratings yet
- Structural (For Tender)Document12 pagesStructural (For Tender)khawaldeh jamalNo ratings yet
- P 103 Ground Floor Plan High LevelDocument1 pageP 103 Ground Floor Plan High Levelkhawaldeh jamalNo ratings yet
- S 207 Column Details 8Document1 pageS 207 Column Details 8khawaldeh jamalNo ratings yet
- One-Way ANOVADocument23 pagesOne-Way ANOVAAnn JoyNo ratings yet
- 2D Euler Riemann RoeDocument72 pages2D Euler Riemann RoeJRNo ratings yet
- Møire 4.01 Docs (1993)Document15 pagesMøire 4.01 Docs (1993)VintageReadMeNo ratings yet
- Thesis Statement For AladdinDocument8 pagesThesis Statement For Aladdindianaturnerspringfield100% (2)
- CRL 1790Document3 pagesCRL 1790nandhus2227No ratings yet
- Bb101 Chapter 1 Physical Quantities and MeasurementDocument14 pagesBb101 Chapter 1 Physical Quantities and MeasurementAidi AmarNo ratings yet
- Wsa CiscoDocument6 pagesWsa Ciscoanhtuan29No ratings yet
- SLR140 - ArDocument51 pagesSLR140 - ArDeepak Ojha100% (1)
- Predictive Maintenance by Electrical Signature Analysis To Induction MotorsDocument41 pagesPredictive Maintenance by Electrical Signature Analysis To Induction Motorsdecio hanashiroNo ratings yet
- Butterfly-Farming The Flying Gems by Labay PIFGEX 2009Document30 pagesButterfly-Farming The Flying Gems by Labay PIFGEX 2009Anonymous HXLczq375% (4)
- Homeopathy BrochureDocument2 pagesHomeopathy Brochuresrwelling67% (3)
- Notification JNTU Anantapur Assistant Professor Posts PDFDocument7 pagesNotification JNTU Anantapur Assistant Professor Posts PDFNagabhushanaNo ratings yet
- ABAP - Dynamic Variant Processing With STVARVDocument12 pagesABAP - Dynamic Variant Processing With STVARVrjcamorim100% (1)
- CGC Construction Handbook Ch9 Acoustical Ceiling Design and Application Can en PDFDocument26 pagesCGC Construction Handbook Ch9 Acoustical Ceiling Design and Application Can en PDFKeri Gobin SamarooNo ratings yet
- Bio Molecular Material Science Term Paper Report Bionics: Submitted By: AMIT JHARBADE 10003033 KAUSHAL CHAVDA 10003032Document14 pagesBio Molecular Material Science Term Paper Report Bionics: Submitted By: AMIT JHARBADE 10003033 KAUSHAL CHAVDA 10003032Amit JharbadeNo ratings yet
- Portable Bricks Transfer Conveyor BeltDocument9 pagesPortable Bricks Transfer Conveyor BeltIJRASETPublicationsNo ratings yet
- Plant SimulationDocument3 pagesPlant SimulationGrant Schorsch KalilNo ratings yet
- Elements of A Web PlanDocument2 pagesElements of A Web Plannadiaanwarmalik2296No ratings yet
- Nikola Tesla: Mysterious Facts (Essay)Document2 pagesNikola Tesla: Mysterious Facts (Essay)DenisKisurkinNo ratings yet
- Physics Unit 1 MechanicsDocument49 pagesPhysics Unit 1 Mechanicsamir hamza100% (1)
- February 26 Homework Solutions: Mechanical Engineering 390 Fluid MechanicsDocument6 pagesFebruary 26 Homework Solutions: Mechanical Engineering 390 Fluid Mechanicsshun84No ratings yet
- EDICONChina2019 - (87) - Vye, David - Designing A Narrowband 28-GHz Bandpass Filter For 5G Applications PDFDocument41 pagesEDICONChina2019 - (87) - Vye, David - Designing A Narrowband 28-GHz Bandpass Filter For 5G Applications PDFkhyatichavdaNo ratings yet
- Session 1 - Introduction To HIP 2017Document18 pagesSession 1 - Introduction To HIP 2017teachernizz100% (3)
- Bus Process Audit Toolkit V1.2 PDFDocument35 pagesBus Process Audit Toolkit V1.2 PDFspongebob11No ratings yet
- Gmath Learning Reinforcement 6 PDFDocument8 pagesGmath Learning Reinforcement 6 PDFSittie Ainna Acmed UnteNo ratings yet
- Process States and Memory Management LabDocument8 pagesProcess States and Memory Management LabJámesNo ratings yet
- Adolescent Sleep Patterns and Insomnia Rates in a Large Population StudyDocument8 pagesAdolescent Sleep Patterns and Insomnia Rates in a Large Population StudyPradipta ShivaNo ratings yet
- Principles of Traditional Indian ArchitectureDocument1 pagePrinciples of Traditional Indian ArchitectureAr SanjayNo ratings yet
- 1 PBDocument11 pages1 PBIyus MaisterNo ratings yet
- Wireless Controlled Smart Digital Energy Meter and Theft Control Using GSM With GUIDocument6 pagesWireless Controlled Smart Digital Energy Meter and Theft Control Using GSM With GUIMuhammad FarhanNo ratings yet