You might also like
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- DC Brush Motor TheoryDocument7 pagesDC Brush Motor Theoryjfsmenezes4534No ratings yet
- Working and Operating Principle of DC MotorDocument40 pagesWorking and Operating Principle of DC MotorAung NetflixNo ratings yet
- Single Phase Induction MotorDocument10 pagesSingle Phase Induction MotorCarlo Pañares MaglasangNo ratings yet
- Introduction: The Induction Motor Is A Three Phase AC Motor and Is The Most WidelyDocument13 pagesIntroduction: The Induction Motor Is A Three Phase AC Motor and Is The Most WidelyAsimNo ratings yet
- Synchronous Machine 1Document6 pagesSynchronous Machine 1dmug793No ratings yet
- Speed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3Document10 pagesSpeed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3rohitkjNo ratings yet
- Induction Motor: Chapter # 01Document22 pagesInduction Motor: Chapter # 01smartengrzNo ratings yet
- Lab 8 DCMotor ParametersDocument11 pagesLab 8 DCMotor ParametersNikhil PatroNo ratings yet
- DTrends Feb 2011Document14 pagesDTrends Feb 2011Rui AllenNo ratings yet
- 2 - Mesin DCDocument25 pages2 - Mesin DCLipasya HamdhaniNo ratings yet
- DC MotorsDocument33 pagesDC MotorsVikram SanthoshNo ratings yet
- Lecture Note em - CH 3 1588264018Document22 pagesLecture Note em - CH 3 1588264018Dr. Deepika YadavNo ratings yet
- Lecture 8 - DC MachinesDocument47 pagesLecture 8 - DC MachinesndmiraqNo ratings yet
- 1 (A) The Equivalent Circuit of A 3-Phase Induction Motor Is Shown in The Below FigureDocument9 pages1 (A) The Equivalent Circuit of A 3-Phase Induction Motor Is Shown in The Below FigureMADHUNo ratings yet
- ECE 320 Energy Conversion and Power Electronics: Chapter ObjectivesDocument7 pagesECE 320 Energy Conversion and Power Electronics: Chapter ObjectivesHüseyin Murat PolaterNo ratings yet
- Experiment 7 Synchronous Motor V-CurvesDocument12 pagesExperiment 7 Synchronous Motor V-Curvesshukla_shrishNo ratings yet
- DC MotorsDocument8 pagesDC MotorsgireeshNo ratings yet
- Induction Motor Modeling - Steady StateDocument43 pagesInduction Motor Modeling - Steady Statedivinelight100% (3)
- Motor DrivesDocument61 pagesMotor DrivesSatesh NairNo ratings yet
- MentionDocument13 pagesMentionmssmsNo ratings yet
- A Three Phase Induction Motor Is Basically A Constant Speed Motor So ItDocument39 pagesA Three Phase Induction Motor Is Basically A Constant Speed Motor So ItManish MakwanaNo ratings yet
- Chapter 7-Induction Motors Part1 PDFDocument18 pagesChapter 7-Induction Motors Part1 PDFMohammadrezaÖztürkNo ratings yet
- Induction Motors PDFDocument108 pagesInduction Motors PDFKshitij ShrivastavaNo ratings yet
- Exemple 1: (Separate Excitation DC Motor)Document4 pagesExemple 1: (Separate Excitation DC Motor)imenenouvelleNo ratings yet
- Mechanical Dynamics, The Swing Equation, Units 1.0 PreliminariesDocument30 pagesMechanical Dynamics, The Swing Equation, Units 1.0 PreliminariesjaragumuraNo ratings yet
- Torque Equation of Three Phase Induction MotorDocument6 pagesTorque Equation of Three Phase Induction MotorAlfianNo ratings yet
- ProjectControl, DC. AnalysisDocument15 pagesProjectControl, DC. AnalysisFir Dauss100% (1)
- Ee 331 Design - Servo MotorDocument5 pagesEe 331 Design - Servo MotorLa-Pierre O'MeallyNo ratings yet
- Quadcopter Dynamics, Simulation, and ControlDocument18 pagesQuadcopter Dynamics, Simulation, and Controldemos2011No ratings yet
- Power System StabilityDocument9 pagesPower System StabilityराघवतोतलाNo ratings yet
- Working Principles Need of Dynamic Modeling and Accurate Control of Motor Drives Dynamic Modeling of DC Machine Control of DC MachineDocument23 pagesWorking Principles Need of Dynamic Modeling and Accurate Control of Motor Drives Dynamic Modeling of DC Machine Control of DC MachineAli ZahidNo ratings yet
- Chopper Control DC Drive - 090075mDocument8 pagesChopper Control DC Drive - 090075mIsuru Pasan Dasanayake100% (1)
- Synchronous Machines TestsDocument22 pagesSynchronous Machines TestsKareem CambridgeNo ratings yet
- Acfrogbnenmibparih Ltu2vrvicspmmotyvmyn8m2iyyxdfv13heqim1iwxkxwjdcrbq0kdgk3emlm5iaoxet Grgnocr-gma7-Ptim4k6jsouhhb0nsx Mn2bjhlvb8hafi R-V2s Emjn5tj1Document7 pagesAcfrogbnenmibparih Ltu2vrvicspmmotyvmyn8m2iyyxdfv13heqim1iwxkxwjdcrbq0kdgk3emlm5iaoxet Grgnocr-gma7-Ptim4k6jsouhhb0nsx Mn2bjhlvb8hafi R-V2s Emjn5tj1KISHORE KNo ratings yet
- Speed Control of Induction MotorDocument7 pagesSpeed Control of Induction Motorzx1_12No ratings yet
- Em Ii PDFDocument76 pagesEm Ii PDFRavi SharmaNo ratings yet
- وصف مواد تخصص الهندسة الكهربائية باللغة العربيةDocument23 pagesوصف مواد تخصص الهندسة الكهربائية باللغة العربيةحمزة الفيتوريNo ratings yet
- Swing EquationDocument31 pagesSwing EquationanbuelectricalNo ratings yet
- Chapter-Three (II) DC MotorsDocument9 pagesChapter-Three (II) DC MotorsDawit LijalemNo ratings yet
- CHAPTER 8 Induction MotorDocument3 pagesCHAPTER 8 Induction MotorDhanashree ParanjapeNo ratings yet
- Swing EquationDocument32 pagesSwing EquationpsmajuNo ratings yet
- Power System StabilityDocument78 pagesPower System StabilityGeetha GaganNo ratings yet
- PPT1 Unit 3 DC Motor Working, Types, Torque and Speed Equation, Applications, CharacteristicsDocument47 pagesPPT1 Unit 3 DC Motor Working, Types, Torque and Speed Equation, Applications, CharacteristicsRAMESH BABU EEENo ratings yet
- Part I: Principles of DC Drive Control: Learning ObjectivesDocument4 pagesPart I: Principles of DC Drive Control: Learning ObjectivesPham LongNo ratings yet
- DC Motor Calculations 2004Document27 pagesDC Motor Calculations 2004erkamlakar2234No ratings yet
- Applied Directly To The Stator WindingsDocument53 pagesApplied Directly To The Stator WindingsSew HunNo ratings yet
- Unit-4 Induction MotorsDocument26 pagesUnit-4 Induction MotorsAnurag Singhal0% (1)
- Chapter 5Document73 pagesChapter 5Niket GuptaNo ratings yet
- Lab 2 - Electric Motor: Part 1 - How Does A DC Motor Work?Document8 pagesLab 2 - Electric Motor: Part 1 - How Does A DC Motor Work?Fuad SuleymanNo ratings yet
- Electric Drive Systems - Lecture No.11Document12 pagesElectric Drive Systems - Lecture No.11saiedali2005No ratings yet
- InductionMotors Gate Material PartBDocument38 pagesInductionMotors Gate Material PartBpraveen6494No ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- A New System of Alternating Current Motors and TransformersFrom EverandA New System of Alternating Current Motors and TransformersRating: 1 out of 5 stars1/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Sensors: Adaptive PIF Control For Permanent Magnet Synchronous Motors Based On GPCDocument18 pagesSensors: Adaptive PIF Control For Permanent Magnet Synchronous Motors Based On GPCebrahimpanNo ratings yet
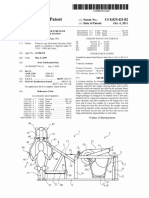
- United States Patent (10) Patent N6 US 8,029,424 B2: Thulin 45 Date of Patent: Oct. 4 2011Document15 pagesUnited States Patent (10) Patent N6 US 8,029,424 B2: Thulin 45 Date of Patent: Oct. 4 2011ebrahimpanNo ratings yet
- Mechatronics: Haoyong Yu, Sunan Huang, Gong Chen, Nitish ThakorDocument12 pagesMechatronics: Haoyong Yu, Sunan Huang, Gong Chen, Nitish ThakorebrahimpanNo ratings yet
- Adaptation of Multijoint Coordination During Standing Balance in Healthy Young and Healthy Old IndividualsDocument14 pagesAdaptation of Multijoint Coordination During Standing Balance in Healthy Young and Healthy Old IndividualsebrahimpanNo ratings yet
- Design and Implementation of A Distributed Variable Impedance Actuator Using Parallel Linear SpringsDocument12 pagesDesign and Implementation of A Distributed Variable Impedance Actuator Using Parallel Linear SpringsebrahimpanNo ratings yet
- A Review of The Use of Electro-Motor Stimulation in Human MusclesDocument13 pagesA Review of The Use of Electro-Motor Stimulation in Human MusclesebrahimpanNo ratings yet
- Spring Over Muscle (SOM) Actuator For Rehabilitation DevicesDocument4 pagesSpring Over Muscle (SOM) Actuator For Rehabilitation DevicesebrahimpanNo ratings yet
- Strain CylindricalDocument4 pagesStrain CylindricalebrahimpanNo ratings yet
- Watanabe 2010Document4 pagesWatanabe 2010ebrahimpanNo ratings yet
- An Assisted Waist Supporter For Vertebral RehabilitationDocument2 pagesAn Assisted Waist Supporter For Vertebral RehabilitationebrahimpanNo ratings yet
- I M T: R F V: Sokinetic Uscle Esting Eflections ON Uture EnuesDocument6 pagesI M T: R F V: Sokinetic Uscle Esting Eflections ON Uture EnuesebrahimpanNo ratings yet
- Jomms 08Document20 pagesJomms 08ebrahimpanNo ratings yet
- Zenoah g320rc Owners Manual DDMDocument28 pagesZenoah g320rc Owners Manual DDMSunthron SomchaiNo ratings yet
- Tip Convolution Lang98Document5 pagesTip Convolution Lang98ebrahimpanNo ratings yet
- 06 Linear Elasticity 03 Anisotropy PDFDocument11 pages06 Linear Elasticity 03 Anisotropy PDFebrahimpanNo ratings yet
- Introduction To Templates in C++Document16 pagesIntroduction To Templates in C++hammarbytpNo ratings yet
- Prof Ed 3 Module 1Document9 pagesProf Ed 3 Module 1alexa dawatNo ratings yet
- 10 - SHM, Springs, DampingDocument4 pages10 - SHM, Springs, DampingBradley NartowtNo ratings yet
- Benchmark Leadership Philosphy Ead 501Document5 pagesBenchmark Leadership Philosphy Ead 501api-494301924No ratings yet
- Principal Examiner Feedback Summer 2016: Pearson Edexcel GCSE in Statistics (2ST01) Higher Paper 1HDocument14 pagesPrincipal Examiner Feedback Summer 2016: Pearson Edexcel GCSE in Statistics (2ST01) Higher Paper 1HHeavenly SinNo ratings yet
- Rewriting Snow White As A Powerful WomanDocument6 pagesRewriting Snow White As A Powerful WomanLaura RodriguezNo ratings yet
- Projected Costs of Generating Electricity (EGC) 2005Document233 pagesProjected Costs of Generating Electricity (EGC) 2005susantojdNo ratings yet
- TMA GuideDocument3 pagesTMA GuideHamshavathini YohoratnamNo ratings yet
- Reclaimer PDFDocument8 pagesReclaimer PDFSiti NurhidayatiNo ratings yet
- MT Im For 2002 3 PGC This Is A Lecture About Politics Governance and Citizenship This Will HelpDocument62 pagesMT Im For 2002 3 PGC This Is A Lecture About Politics Governance and Citizenship This Will HelpGen UriNo ratings yet
- JOB Performer: Q .1: What Is Permit?Document5 pagesJOB Performer: Q .1: What Is Permit?Shahid BhattiNo ratings yet
- Ugtt April May 2019 NewDocument48 pagesUgtt April May 2019 NewSuhas SNo ratings yet
- Nielsen Report - The New Trend Among Indonesia's NetizensDocument20 pagesNielsen Report - The New Trend Among Indonesia's NetizensMarsha ImaniaraNo ratings yet
- 5 Teacher Induction Program - Module 5Document27 pages5 Teacher Induction Program - Module 5LAZABELLE BAGALLON0% (1)
- Regression Week 2: Multiple Linear Regression Assignment 1: If You Are Using Graphlab CreateDocument1 pageRegression Week 2: Multiple Linear Regression Assignment 1: If You Are Using Graphlab CreateSamNo ratings yet
- 103-Article Text-514-1-10-20190329Document11 pages103-Article Text-514-1-10-20190329Elok KurniaNo ratings yet
- Consequences of Self-Handicapping: Effects On Coping, Academic Performance, and AdjustmentDocument11 pagesConsequences of Self-Handicapping: Effects On Coping, Academic Performance, and AdjustmentAlliah Kate SalvadorNo ratings yet
- Plantas Con Madre Plants That Teach and PDFDocument15 pagesPlantas Con Madre Plants That Teach and PDFJetNo ratings yet
- Jack Arch RetrofitDocument13 pagesJack Arch RetrofitDebendra Dev KhanalNo ratings yet
- Exam TimetableDocument16 pagesExam Timetablenyarko_eNo ratings yet
- Yaskawa V7 ManualsDocument155 pagesYaskawa V7 ManualsAnonymous GbfoQcCNo ratings yet
- Angelina JolieDocument14 pagesAngelina Joliemaria joannah guanteroNo ratings yet
- Bomba Manual Hidraulica - P 19 LDocument2 pagesBomba Manual Hidraulica - P 19 LBruno PachecoNo ratings yet
- PERSONAL DEVELOPMENT (What Is Personal Development?)Document37 pagesPERSONAL DEVELOPMENT (What Is Personal Development?)Ronafe Roncal GibaNo ratings yet
- Cot Observation ToolDocument14 pagesCot Observation ToolArnoldBaladjayNo ratings yet
- RMC No. 122 2022 9.6.2022Document6 pagesRMC No. 122 2022 9.6.2022RUFO BULILANNo ratings yet
- A Project Diary-Wps OfficeDocument4 pagesA Project Diary-Wps OfficeSameer ShaikhNo ratings yet
- Technical Textile and SustainabilityDocument5 pagesTechnical Textile and SustainabilityNaimul HasanNo ratings yet
- DLL - English 5 - Q3 - W8Document8 pagesDLL - English 5 - Q3 - W8Merlyn S. Al-osNo ratings yet
- TAPPI T 810 Om-06 Bursting Strength of Corrugated and Solid FiberboardDocument5 pagesTAPPI T 810 Om-06 Bursting Strength of Corrugated and Solid FiberboardNguyenSongHaoNo ratings yet