You might also like
- Sensores AutomotricesDocument7 pagesSensores AutomotricesMaria Enedina Contreras92% (13)
- Sfi M9CT02Document30 pagesSfi M9CT02Josue PeñaNo ratings yet
- Solucionario de B. Makarenko - Ejercicios y Problemas de Ecuaciones Diferenciales Ordinarias - FLDocument261 pagesSolucionario de B. Makarenko - Ejercicios y Problemas de Ecuaciones Diferenciales Ordinarias - FLihinojosa_6100% (24)
- Ajuste Mariposa Motorizada PDFDocument5 pagesAjuste Mariposa Motorizada PDFJaviers100% (2)
- Programacion Cuerpos Aceleracion INATCO PDFDocument5 pagesProgramacion Cuerpos Aceleracion INATCO PDFJimmy Quise LlamoccaNo ratings yet
- EPS niegan pañales para adultos mayoresDocument12 pagesEPS niegan pañales para adultos mayoresAlvaro Gallego Sanchez63% (8)
- Escáner automotriz OBD2: códigos de falla, protocolo de uso e interpretaciónDocument9 pagesEscáner automotriz OBD2: códigos de falla, protocolo de uso e interpretaciónDerio100% (1)
- 1 Incylinder EspañolDocument5 pages1 Incylinder EspañolRoger Ortega100% (1)
- Protocolos OBD II vehículosDocument28 pagesProtocolos OBD II vehículosOriel100% (1)
- Aprenda A Diagnosticar Un Red Can y Que Metodos Debes de EmplearDocument3 pagesAprenda A Diagnosticar Un Red Can y Que Metodos Debes de EmplearJaimer Yersiño Riveros ReyesNo ratings yet
- LIN bus sistemaDocument15 pagesLIN bus sistemaJosue SisimithNo ratings yet
- CanbusDocument36 pagesCanbusEduardo Cruz100% (2)
- Bus LinDocument17 pagesBus LinSantiago Mejia Gonzalez100% (1)
- Estructura de techumbre en maderaDocument41 pagesEstructura de techumbre en maderaXimena BarreraNo ratings yet
- Bobinas de Encendido AutomotricesDocument14 pagesBobinas de Encendido AutomotricesNashlo Seguel Pérez100% (1)
- Ajuste Basico DSGDocument6 pagesAjuste Basico DSGNestor FidalgoNo ratings yet
- Cise ElectronicDocument38 pagesCise ElectronicWalter Puca100% (2)
- Autónomo Sobre Redes Multiplexadas AutomotricesDocument976 pagesAutónomo Sobre Redes Multiplexadas AutomotricesRomulo Fernando Astudillo BravoNo ratings yet
- UF1874 - Mantenimiento de la infraestructura de la red de comunicacionesFrom EverandUF1874 - Mantenimiento de la infraestructura de la red de comunicacionesNo ratings yet
- Valores Típicos de Los Parámetros en El Scanner PDFDocument21 pagesValores Típicos de Los Parámetros en El Scanner PDFornitorrinco33No ratings yet
- Programar Cuerpo Del Acelerador CTA PDF JagDocument5 pagesProgramar Cuerpo Del Acelerador CTA PDF JagJorge Antonio Guillen100% (1)
- Multiplexado AutomotrizDocument6 pagesMultiplexado AutomotrizJonathan FuentesNo ratings yet
- Multiplexado en El Automovil Programa de Curso de MultiplexadoDocument11 pagesMultiplexado en El Automovil Programa de Curso de MultiplexadoHilda AriasNo ratings yet
- CAN BUS VW SPDocument29 pagesCAN BUS VW SPIsmael Lenin Barahona LazoNo ratings yet
- Presentación para CFIE - MultiplexadoDocument20 pagesPresentación para CFIE - MultiplexadoMatias NeiraNo ratings yet
- BUS LinDocument3 pagesBUS LinJavierNo ratings yet
- Red de Comunicacion CanDocument21 pagesRed de Comunicacion CanTavo MújicaNo ratings yet
- Auto Tronic ADocument11 pagesAuto Tronic AVictor Rodríguez PatNo ratings yet
- Manual Diagnostico Reparacion Sistema Llave Inteligente Nissan Componentes Funciones Procedimiento Solucion ProblemasDocument21 pagesManual Diagnostico Reparacion Sistema Llave Inteligente Nissan Componentes Funciones Procedimiento Solucion ProblemasDirciosNo ratings yet
- Sonda LambdaDocument17 pagesSonda LambdaKarlitosmanNo ratings yet
- Averias en El Sistema Multiplexado - CANbus PDFDocument23 pagesAverias en El Sistema Multiplexado - CANbus PDFjmarsaajosNo ratings yet
- 5.1 Sensor de Oxigeno de Banda AnchaDocument10 pages5.1 Sensor de Oxigeno de Banda AnchaRonaldo Matias100% (1)
- Funciones Especiales Escaner VWDocument10 pagesFunciones Especiales Escaner VWJorge Antonio GuillenNo ratings yet
- Manual Redes de Comunicación y Can BusDocument8 pagesManual Redes de Comunicación y Can BusJose Luis EcheverriaNo ratings yet
- j2534 IntroDocument50 pagesj2534 Introerick alexander hernandezNo ratings yet
- Sistema de Multiplexado de Datos LIN-BusDocument17 pagesSistema de Multiplexado de Datos LIN-BusKevin Strong100% (1)
- PCM Módulo de Control Del Tren de Potencia EXPONERDocument4 pagesPCM Módulo de Control Del Tren de Potencia EXPONERSoledad KaryNo ratings yet
- Obd 1,2,3Document12 pagesObd 1,2,3Richard LdsNo ratings yet
- Acelerador ElectronicoDocument18 pagesAcelerador ElectronicoJosé CóndorNo ratings yet
- Red multiplexada CAN busDocument12 pagesRed multiplexada CAN busClaudio Silva100% (1)
- El Módulo TIPMDocument3 pagesEl Módulo TIPMARAMNDO GALVANNo ratings yet
- SensoresDocument23 pagesSensoresJose ElizaldeNo ratings yet
- Cómo probar sensor MAF GM 3.1L-5.7L en 3 pasosDocument4 pagesCómo probar sensor MAF GM 3.1L-5.7L en 3 pasosbelesferonte100% (1)
- Sensor APPDocument15 pagesSensor APPJaime León Almeida100% (1)
- MegaSquirt ECU controlador programable inyección combustibleDocument13 pagesMegaSquirt ECU controlador programable inyección combustibleGuillermo Fernando Cerda SerranoNo ratings yet
- Sensor de CargaDocument4 pagesSensor de CargaAMAL SAQRONINo ratings yet
- ¿Qué Es El CAN BUS y Cómo Funciona - INGENIERÍA Y MECÁNICA AUTOMOTRIZDocument4 pages¿Qué Es El CAN BUS y Cómo Funciona - INGENIERÍA Y MECÁNICA AUTOMOTRIZVictor A Ortega DNo ratings yet
- Entrada DLC Obd I y Obd IIDocument22 pagesEntrada DLC Obd I y Obd IICarlos LuqueNo ratings yet
- CKP ÓpticoDocument31 pagesCKP Ópticolibni cruzNo ratings yet
- DTC B2958Document2 pagesDTC B2958Oscar Slzr DcNsNo ratings yet
- Sensores y Actuadores en TransmisionesDocument23 pagesSensores y Actuadores en TransmisionesMaicol Guzmán100% (1)
- Seminario Multiplexado 3Document46 pagesSeminario Multiplexado 3B Arturo GalindoNo ratings yet
- Lamp22 PDFDocument7 pagesLamp22 PDFjelvio1No ratings yet
- Diagnosis Nissan SentraDocument1 pageDiagnosis Nissan Sentradavid orellana100% (1)
- PDF Servodireccion Ephs DLDocument28 pagesPDF Servodireccion Ephs DLDENIS UGEÑONo ratings yet
- Análisis del ciclo Otto mediante el uso del osciloscopio y presión transducerDocument5 pagesAnálisis del ciclo Otto mediante el uso del osciloscopio y presión transducerGilmar Berzosa100% (1)
- Sensor KSDocument13 pagesSensor KSFausto ArmijosNo ratings yet
- Redes de Comunicacion en El AutomovilDocument20 pagesRedes de Comunicacion en El AutomovilManoloNo ratings yet
- Practica 2 Sensores y ActuadoresDocument9 pagesPractica 2 Sensores y ActuadoresLocote GomoraNo ratings yet
- h16 Explicado TCM - En.esDocument19 pagesh16 Explicado TCM - En.esFlorentinoChoquehuancaNo ratings yet
- Redes CanDocument19 pagesRedes CanJesús Gutiérrez100% (2)
- Válvula de Recirculación de Gases de Escape - Válvulas EgrDocument13 pagesVálvula de Recirculación de Gases de Escape - Válvulas EgrGerbercp Condori PalaciosNo ratings yet
- Red LinDocument3 pagesRed Linsergio salgadoNo ratings yet
- BS de Datos LinDocument13 pagesBS de Datos LinPaul ToaquizaNo ratings yet
- Analisis de GasesDocument18 pagesAnalisis de GasesCKrlitos ManuellNo ratings yet
- Malla Curriula Utn Ima PDFDocument3 pagesMalla Curriula Utn Ima PDFDaniel GomezNo ratings yet
- Trabajo Analisis de Codigos de FallaDocument7 pagesTrabajo Analisis de Codigos de FallaDaniel GomezNo ratings yet
- OtherDocument69 pagesOtherDaniel GomezNo ratings yet
- Guerrero 1-Informe At5102 PDFDocument9 pagesGuerrero 1-Informe At5102 PDFDaniel GomezNo ratings yet
- Sistemas de Medidas EspañaDocument12 pagesSistemas de Medidas Españafergasak1670No ratings yet
- TransporteDocument4 pagesTransporteDaniel GomezNo ratings yet
- CircuitosDocument9 pagesCircuitosDaniel GomezNo ratings yet
- Capitulo III ConvcatalíticoDocument12 pagesCapitulo III ConvcatalíticoelectricalcodeNo ratings yet
- Quimica Clase - 2Document37 pagesQuimica Clase - 2Daniel GomezNo ratings yet
- Excavación y CargaDocument4 pagesExcavación y CargaDaniel GomezNo ratings yet
- Daniel Gomez Consulta RodillosDocument4 pagesDaniel Gomez Consulta RodillosDaniel GomezNo ratings yet
- ComidaDocument4 pagesComidaDaniel GomezNo ratings yet
- Administracion Entorno Regional FinalDocument23 pagesAdministracion Entorno Regional FinalDaniel GomezNo ratings yet
- Sistema de Inyección Inyector Bomba - Aguirre - LeninDocument5 pagesSistema de Inyección Inyector Bomba - Aguirre - LeninDaniel GomezNo ratings yet
- Consulta de Mantenimiento en Maquinaria Pesada Daniel GomezDocument8 pagesConsulta de Mantenimiento en Maquinaria Pesada Daniel GomezDaniel GomezNo ratings yet
- Acumulador de Presión - Chapi JeffersonDocument3 pagesAcumulador de Presión - Chapi JeffersonDaniel GomezNo ratings yet
- Excavación y CargaDocument4 pagesExcavación y CargaDaniel GomezNo ratings yet
- Consulta de Mantenimiento en Maquinaria Pesada Daniel GomezDocument7 pagesConsulta de Mantenimiento en Maquinaria Pesada Daniel GomezDaniel GomezNo ratings yet
- Tipos de Émbolos y Su Fabricación - Chapi JeffersonDocument3 pagesTipos de Émbolos y Su Fabricación - Chapi JeffersonDaniel GomezNo ratings yet
- Sistema de Inyección Inyector Bomba - Aguirre - LeninDocument5 pagesSistema de Inyección Inyector Bomba - Aguirre - LeninDaniel GomezNo ratings yet
- TransporteDocument4 pagesTransporteDaniel GomezNo ratings yet
- Tipos de Émbolos y Su Fabricación - Chapi JeffersonDocument3 pagesTipos de Émbolos y Su Fabricación - Chapi JeffersonDaniel GomezNo ratings yet
- Sistema de Inyección Inyector Bomba - Aguirre - LeninDocument5 pagesSistema de Inyección Inyector Bomba - Aguirre - LeninDaniel GomezNo ratings yet
- Sistema de Inyección Inyector Bomba - Aguirre - LeninDocument5 pagesSistema de Inyección Inyector Bomba - Aguirre - LeninDaniel GomezNo ratings yet
- Señal PWM - Chapi JeffersonDocument1 pageSeñal PWM - Chapi JeffersonDaniel GomezNo ratings yet
- Seguridad Gases de EscapeDocument1 pageSeguridad Gases de EscapeDaniel GomezNo ratings yet
- Seguridad Trabajos ElectricosDocument1 pageSeguridad Trabajos ElectricosDaniel GomezNo ratings yet
- 2022.02 - Práctica N°1 (LSEP) FormularioDocument3 pages2022.02 - Práctica N°1 (LSEP) FormularioPiero Portal RazaNo ratings yet
- La Marca (Norberto Chaves)Document2 pagesLa Marca (Norberto Chaves)Adris PiNo ratings yet
- Cuadernillo de Evaluación 1Document10 pagesCuadernillo de Evaluación 1Juanjose RamirezNo ratings yet
- Analista Calidad BancaDocument5 pagesAnalista Calidad BancaChristianRodrigoInfanzonNo ratings yet
- Cementación y recristalización en rocas sedimentariasDocument20 pagesCementación y recristalización en rocas sedimentariasCarlo MagnoNo ratings yet
- Mineral EsDocument30 pagesMineral EsElsa Patricia Real SolisNo ratings yet
- Fantasía y muerte en terapia: una aproximación a la propia muerteDocument8 pagesFantasía y muerte en terapia: una aproximación a la propia muerteAnonymous AzXah9n0YNo ratings yet
- Proyecto Interdiciplinarprimer Trimestre 2do - EgbDocument25 pagesProyecto Interdiciplinarprimer Trimestre 2do - EgbAxelMiguelPilamungaLunaNo ratings yet
- Contrato Anticipado 2022 Con FirmaDocument3 pagesContrato Anticipado 2022 Con FirmaLeidy Geraldine PavaNo ratings yet
- La Importancia de Los Estados Financieros en Las Empresas. Hairo PinedoDocument5 pagesLa Importancia de Los Estados Financieros en Las Empresas. Hairo PinedoMelissa canazas100% (1)
- 20-03-23 - Ficha de Trabajo - Personal SocialDocument7 pages20-03-23 - Ficha de Trabajo - Personal SocialDELIA AYARQUISPENo ratings yet
- Costos y PresupuestoDocument4 pagesCostos y PresupuestoMariliny HerreraNo ratings yet
- Curso Complementario - GENEXUS - PrácticaDocument9 pagesCurso Complementario - GENEXUS - PrácticaJose Villena TorresNo ratings yet
- Diapositiva 21Document33 pagesDiapositiva 21ESPINOZA SIFUENTES SOLEDAD OLINDANo ratings yet
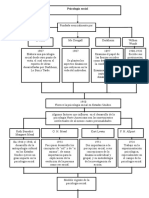
- Mapa Conceptual Psicologia SocialDocument1 pageMapa Conceptual Psicologia Socialisrael Martinez B.100% (5)
- Diseño Geometrico de Carreteras - Clase 1Document55 pagesDiseño Geometrico de Carreteras - Clase 1Atila MesalaNo ratings yet
- Sobre La Naturaleza Del Trabajo de Guardia de SeguridadDocument4 pagesSobre La Naturaleza Del Trabajo de Guardia de SeguridadJuventudGuevaristaUsachNo ratings yet
- Tratamiento de Señales - Primer Parcial UISDocument1 pageTratamiento de Señales - Primer Parcial UISEliana Santamaria MoralesNo ratings yet
- Unidad Didáctica 4 2 AristótelesDocument28 pagesUnidad Didáctica 4 2 AristótelesAlejandro Riva ColladaNo ratings yet
- Filtros Pasivos TelecomunicacionesDocument14 pagesFiltros Pasivos TelecomunicacionesGonzalo David Unzueta EchalarNo ratings yet
- Prueba Fenomenos Naturales 2Document2 pagesPrueba Fenomenos Naturales 2Danielita López100% (1)
- Editores de Texto Vi, Vim y EmacsDocument9 pagesEditores de Texto Vi, Vim y EmacsNely Jimnz BNo ratings yet
- Malditas MatematicasDocument19 pagesMalditas MatematicasMiguel Larios HerreraNo ratings yet
- Proyecto Del LiceoDocument13 pagesProyecto Del LiceodoritaxxNo ratings yet
- Magnetism oDocument7 pagesMagnetism oJulianaSatizabalNo ratings yet
- Glosario FilosofiaDocument7 pagesGlosario Filosofiawilliam yanettNo ratings yet
- Codigo Civil Comentado Derecho de ObligacionesDocument660 pagesCodigo Civil Comentado Derecho de ObligacionesjuliortiNo ratings yet