You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Line Oriented Flight Training Guide PDFDocument105 pagesLine Oriented Flight Training Guide PDFMos DetNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Instructor ManualDocument184 pagesInstructor Manualrobsous100% (1)
- GulfstreamG650Rev OriginalDocument60 pagesGulfstreamG650Rev OriginalYeison ChavezNo ratings yet
- Interglobe Aviation LTD: Igo/Ops/Form/Trg/16 Page 1 of 8 Effective: 01-APRIL-2018Document8 pagesInterglobe Aviation LTD: Igo/Ops/Form/Trg/16 Page 1 of 8 Effective: 01-APRIL-2018Aman VermaNo ratings yet
- Army Aviation Digest - Jul 1967Document68 pagesArmy Aviation Digest - Jul 1967Aviation/Space History LibraryNo ratings yet
- Jeffrey Epstein Flight Logs Other Flight DataDocument4 pagesJeffrey Epstein Flight Logs Other Flight DataGods WrathNo ratings yet
- Arinc 446Document25 pagesArinc 446Tan Nguyen Trong HoangNo ratings yet
- Aw119 MK II r0Document16 pagesAw119 MK II r0vanessamecenasNo ratings yet
- Mechanics of FlightDocument1 pageMechanics of FlightMoh Flit25% (4)
- Training and Simulation TechnologiesDocument64 pagesTraining and Simulation TechnologiesPradeepMathadNo ratings yet
- 7000XR Full Flight Simulator: Instructor User GuideDocument378 pages7000XR Full Flight Simulator: Instructor User Guidetubbykaka100% (1)
- Flying Training Circular PDFDocument33 pagesFlying Training Circular PDFshariqNo ratings yet
- Catalogue AgustaWestlandDocument52 pagesCatalogue AgustaWestlandGibran Zoccoli100% (1)
- Wings Pilottraining BrochureDocument8 pagesWings Pilottraining BrochureRishabh RanaNo ratings yet
- DGCA A320 BrochureDocument4 pagesDGCA A320 BrochureAniketNo ratings yet
- Normal 5f5fc792e6de4Document66 pagesNormal 5f5fc792e6de4AbdulmalekNo ratings yet
- Hatsoff: Helicopter Training CentreDocument5 pagesHatsoff: Helicopter Training CentreSatyendra ShuklaNo ratings yet
- MD11 Operation ManualDocument106 pagesMD11 Operation ManualrodolfoaznarNo ratings yet
- E145 Sim ManualDocument311 pagesE145 Sim Manualcpt.damir.hartteNo ratings yet
- Indian DGCA A320 Type Rtaing BrochureDocument9 pagesIndian DGCA A320 Type Rtaing BrochureVnNo ratings yet
- Ott 999 0063 17 00Document9 pagesOtt 999 0063 17 00cristidonaNo ratings yet
- Gmail - WHY JOIN THE BOMBAY FLYING CLUBDocument4 pagesGmail - WHY JOIN THE BOMBAY FLYING CLUBAkash SharmaNo ratings yet
- 9683iANDocument14 pages9683iANLuis RamirezNo ratings yet
- Caa-M-Ops021 Designated Check Pilot ManualDocument72 pagesCaa-M-Ops021 Designated Check Pilot ManualAirbus330 Airbus330No ratings yet
- Introduction To Augmented RealityDocument64 pagesIntroduction To Augmented RealitySiddharth Gupta100% (1)
- Aerostar Training Course Catalog 2019Document13 pagesAerostar Training Course Catalog 2019supun.aviateNo ratings yet
- F Test 2course V2Document7 pagesF Test 2course V2denisok.77711123No ratings yet
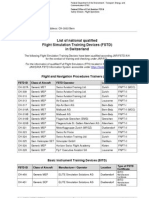
- List of National Qualified FSTDs in Switzerland 110228Document1 pageList of National Qualified FSTDs in Switzerland 110228kanajuurikasNo ratings yet
- Research EssayDocument11 pagesResearch Essayapi-509585875100% (1)
- Ho 41Document68 pagesHo 41Lavern SipinNo ratings yet