You might also like
- 10 1109@tie 2017 2698425 PDFDocument12 pages10 1109@tie 2017 2698425 PDFRiad TifaNo ratings yet
- Solar PV-Battery Based Hybrid Water Pumping System Using BLDC Motor DriveDocument6 pagesSolar PV-Battery Based Hybrid Water Pumping System Using BLDC Motor DriveRiad TifaNo ratings yet
- Tertiary and Secondary Control Levels For Efficiency Optimization and System Damping in Droop Controlled DC-DC ConvertersDocument12 pagesTertiary and Secondary Control Levels For Efficiency Optimization and System Damping in Droop Controlled DC-DC ConvertersRiad TifaNo ratings yet
- An Enhanced Droop Control Method For Accurate Load Sharing and Voltage Improvement of Isolated and Interconnected DC MicrogridsDocument11 pagesAn Enhanced Droop Control Method For Accurate Load Sharing and Voltage Improvement of Isolated and Interconnected DC MicrogridsRiad TifaNo ratings yet
- 07418710Document4 pages07418710Riad TifaNo ratings yet
- ICREEC'2019: International Conference on Renewable Energy and Energy ConversionDocument2 pagesICREEC'2019: International Conference on Renewable Energy and Energy ConversionRiad TifaNo ratings yet
- Control Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniDocument16 pagesControl Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniRiad TifaNo ratings yet
- 10 1109@tie 2017 2698425 PDFDocument12 pages10 1109@tie 2017 2698425 PDFRiad TifaNo ratings yet
- 74 Adaptive Decentralized Droop ControllerDocument11 pages74 Adaptive Decentralized Droop ControllerRiad TifaNo ratings yet
- Design of Solar Water Pumping System With FCMA Soft StarterDocument4 pagesDesign of Solar Water Pumping System With FCMA Soft StarterRiad TifaNo ratings yet
- Homer PaperDocument13 pagesHomer PaperRiad TifaNo ratings yet
- 07038525Document6 pages07038525Riad TifaNo ratings yet
- Control Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniDocument16 pagesControl Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniRiad TifaNo ratings yet
- 3 Maison PDFDocument6 pages3 Maison PDFRiad TifaNo ratings yet
- WSN 672 2017 126 148 2Document24 pagesWSN 672 2017 126 148 2Amit DostNo ratings yet
- Economic Comparison of Solar PV and Diesel Water Pumping SystemDocument6 pagesEconomic Comparison of Solar PV and Diesel Water Pumping SystemRiad TifaNo ratings yet
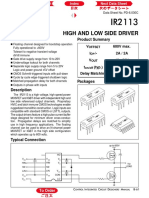
- High and Low Side Driver: Features Product SummaryDocument14 pagesHigh and Low Side Driver: Features Product SummaryMiguel GalvánNo ratings yet
- 07041977Document6 pages07041977Riad TifaNo ratings yet
- High and Low Side Driver: Features Product SummaryDocument14 pagesHigh and Low Side Driver: Features Product SummaryMiguel GalvánNo ratings yet
- IRFP460Document9 pagesIRFP460yusufwpNo ratings yet
- Solar PV Array Fed Water Pumping Using BLDC Motor Drive With Boost-Buck ConverterDocument8 pagesSolar PV Array Fed Water Pumping Using BLDC Motor Drive With Boost-Buck ConverterRiad TifaNo ratings yet
- Optoacoplador Integrado 4N25Document7 pagesOptoacoplador Integrado 4N25aureliocsNo ratings yet
- PDFDocument4 pagesPDFRiad TifaNo ratings yet
- Supplementary Load Frequency Control by Use of A Number of Both Electric Vehicles and Heat Pump Water HeatersDocument10 pagesSupplementary Load Frequency Control by Use of A Number of Both Electric Vehicles and Heat Pump Water HeatersRiad TifaNo ratings yet
- Modeling of A Number of Heat Pump Water Heaters As Control Equipment For Load Frequency Control in Power SystemsDocument7 pagesModeling of A Number of Heat Pump Water Heaters As Control Equipment For Load Frequency Control in Power SystemsRiad TifaNo ratings yet
- Design and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemDocument8 pagesDesign and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemRiad TifaNo ratings yet
- Air Source Heat Pump A Key Role in The Development of Smart Buildings in Future Energy SystemsDocument6 pagesAir Source Heat Pump A Key Role in The Development of Smart Buildings in Future Energy SystemsRiad TifaNo ratings yet
- Performance Analysis of A Directly Coupled Photovoltaic Water-Pumping SystemDocument6 pagesPerformance Analysis of A Directly Coupled Photovoltaic Water-Pumping SystemRiad TifaNo ratings yet
- Design and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemDocument8 pagesDesign and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemRiad TifaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- IMRANADocument4 pagesIMRANAAji MohammedNo ratings yet
- Ceramic EthnoarchaeologyDocument336 pagesCeramic EthnoarchaeologyAhmad adelNo ratings yet
- Mathematics: Textbook For Class XIIDocument14 pagesMathematics: Textbook For Class XIIFlowring PetalsNo ratings yet
- Irregular verbs guideDocument159 pagesIrregular verbs guideIrina PadureanuNo ratings yet
- Between The World and MeDocument2 pagesBetween The World and Meapi-3886294240% (1)
- (Cooperative) BOD and Secretary CertificateDocument3 pages(Cooperative) BOD and Secretary Certificateresh lee100% (1)
- 2020-2021 Tuition and Fee Rates Per Semester: Georgia Institute of TechnologyDocument2 pages2020-2021 Tuition and Fee Rates Per Semester: Georgia Institute of TechnologyAurangzaib JahangirNo ratings yet
- The Lesser Key of SolomonDocument142 pagesThe Lesser Key of Solomonmagnus100% (5)
- Cost of DebtDocument3 pagesCost of DebtGonzalo De CorralNo ratings yet
- Dorfman v. UCSD Ruling - California Court of Appeal, Fourth Appellate DivisionDocument20 pagesDorfman v. UCSD Ruling - California Court of Appeal, Fourth Appellate DivisionThe College FixNo ratings yet
- Biffa Annual Report and Accounts 2022 InteractiveDocument232 pagesBiffa Annual Report and Accounts 2022 InteractivepeachyceriNo ratings yet
- International HR Management at Buro HappoldDocument10 pagesInternational HR Management at Buro HappoldNishan ShettyNo ratings yet
- Christ The Redemers Secondary SchoolDocument36 pagesChrist The Redemers Secondary Schoolisrael_tmjesNo ratings yet
- Pindyck Solutions Chapter 5Document13 pagesPindyck Solutions Chapter 5Ashok Patsamatla100% (1)
- Annamalai University: B.A. SociologyDocument84 pagesAnnamalai University: B.A. SociologyJoseph John100% (1)
- Ray Kroc's Visionary Leadership at McDonald'sDocument4 pagesRay Kroc's Visionary Leadership at McDonald'sViknesh Kumanan100% (1)
- Application For A US PassportDocument6 pagesApplication For A US PassportAbu Hamza SidNo ratings yet
- The Left, The Right, and The State (Read in "Fullscreen")Document570 pagesThe Left, The Right, and The State (Read in "Fullscreen")Ludwig von Mises Institute100% (68)
- Ford Investigative Judgment Free EbookDocument73 pagesFord Investigative Judgment Free EbookMICHAEL FAJARDO VARAS100% (1)
- FX MKT Insights Jun2010 Rosenberg PDFDocument27 pagesFX MKT Insights Jun2010 Rosenberg PDFsuksesNo ratings yet
- Handout On Reed 1 Initium Fidei: An Introduction To Doing Catholic Theology Lesson 4 Naming GraceDocument8 pagesHandout On Reed 1 Initium Fidei: An Introduction To Doing Catholic Theology Lesson 4 Naming GraceLEILA GRACE MALACANo ratings yet
- Customer Based Brand EquityDocument13 pagesCustomer Based Brand EquityZeeshan BakshiNo ratings yet
- Assemblage Theory, Complexity and Contentious Politics - The Political Ontology of Gilles DeleuzeDocument130 pagesAssemblage Theory, Complexity and Contentious Politics - The Political Ontology of Gilles DeleuzeGiorgio Bertini75% (4)
- Bautista CL MODULEDocument2 pagesBautista CL MODULETrisha Anne Aranzaso BautistaNo ratings yet
- Olsson Jah ResilienceDocument12 pagesOlsson Jah ResilienceANA ZABRINA PERDOMO MERLOSNo ratings yet
- Growth of Royal Power in England and FranceDocument6 pagesGrowth of Royal Power in England and FrancecharliNo ratings yet
- Vivarium - Vol 37, Nos. 1-2, 1999Document306 pagesVivarium - Vol 37, Nos. 1-2, 1999Manticora VenerabilisNo ratings yet
- Place of Provision of Services RulesDocument4 pagesPlace of Provision of Services RulesParth UpadhyayNo ratings yet
- Can You Dribble The Ball Like A ProDocument4 pagesCan You Dribble The Ball Like A ProMaradona MatiusNo ratings yet
- The Crucible Summary and Analysis of Act TwoDocument4 pagesThe Crucible Summary and Analysis of Act TwoXhéhzÂda saleem zehriNo ratings yet