You might also like
- Practical Troubleshooting and Problem Solving of Ethernet NetworksDocument28 pagesPractical Troubleshooting and Problem Solving of Ethernet NetworksMonish KrishnaNo ratings yet
- Jic Course CatalogDocument42 pagesJic Course Catalogاحمد حسنNo ratings yet
- Honeywell Experion System For Teaching Purposes: Year 2013Document60 pagesHoneywell Experion System For Teaching Purposes: Year 2013koushikNo ratings yet
- Part19 Industrial AutomationDocument21 pagesPart19 Industrial AutomationkaicyemNo ratings yet
- Honeywell Webinar QA Is Your PID Controller Performance Up To ParDocument4 pagesHoneywell Webinar QA Is Your PID Controller Performance Up To PartsipornNo ratings yet
- Webinar-Translating Business Drivers Into Technology RequirementsDocument17 pagesWebinar-Translating Business Drivers Into Technology RequirementsdtzanakNo ratings yet
- PRESENTATION Plant Control System Display and SupportDocument22 pagesPRESENTATION Plant Control System Display and SupportcarneoliaNo ratings yet
- Air Pollution Measuring Instruments-1Document24 pagesAir Pollution Measuring Instruments-1akshay kumarNo ratings yet
- TheoryDocument42 pagesTheoryEr. Piush JindalNo ratings yet
- ANalyzer Shelter Tool Box TalkDocument1 pageANalyzer Shelter Tool Box TalkhomesxxxNo ratings yet
- ICS OverviewDocument36 pagesICS Overviewisra marabahNo ratings yet
- Electrical and Instrumentation (E&I) Engineering For Oil and Gas FacilitiesDocument22 pagesElectrical and Instrumentation (E&I) Engineering For Oil and Gas Facilitiestaibi aliNo ratings yet
- Outline: What Is Quality? What Is Quality at NSN? What Is QMS?Document27 pagesOutline: What Is Quality? What Is Quality at NSN? What Is QMS?MohamadNasserNo ratings yet
- Chemistry AutoanalyzersDocument22 pagesChemistry Autoanalyzersdinesh redNo ratings yet
- AR500Document140 pagesAR500MelvinDapitanonNo ratings yet
- Analyzers: By, Barath Srinath A 1241110025Document13 pagesAnalyzers: By, Barath Srinath A 1241110025vishnuvarmarajaNo ratings yet
- Caiib-Risk Management-Asset Liability Management - Module ADocument40 pagesCaiib-Risk Management-Asset Liability Management - Module ARitu BhattacharyaNo ratings yet
- Cost EngineeringDocument10 pagesCost EngineeringCharanjeet SinghNo ratings yet
- Aims Interegation - YokogawaDocument18 pagesAims Interegation - YokogawaKoel DeyNo ratings yet
- Distributed Control SystemDocument11 pagesDistributed Control Systemjibin shajiNo ratings yet
- JSL-Lect 3 - Flame Emission and AAS - 26!10!21Document17 pagesJSL-Lect 3 - Flame Emission and AAS - 26!10!21Divyansh SharmaNo ratings yet
- Basic Maching Process and Machine Tools Part 1Document47 pagesBasic Maching Process and Machine Tools Part 1prashrit sapkotaNo ratings yet
- Stages of PlantDocument3 pagesStages of PlantMuthuKumar Arunachalam100% (1)
- Dissolved Oxygen Analyzer Working Principle Instrumentation ToolsDocument3 pagesDissolved Oxygen Analyzer Working Principle Instrumentation ToolsAbarajithan RajendranNo ratings yet
- Managing Obsolete Technologies - Strategies and PracticesDocument30 pagesManaging Obsolete Technologies - Strategies and PracticescarakooloNo ratings yet
- Total Productive Maintenance Implementation Procedures in Manufacturing Organizations Using Axiomatic Design PrinciplesDocument7 pagesTotal Productive Maintenance Implementation Procedures in Manufacturing Organizations Using Axiomatic Design PrinciplesSam ChristoberNo ratings yet
- Automation PresentationDocument63 pagesAutomation PresentationRamaRaju PydiNo ratings yet
- Process Control FrameworksDocument44 pagesProcess Control FrameworksAweSome, ST,MTNo ratings yet
- Fieldbus-An Introduction - PpsDocument85 pagesFieldbus-An Introduction - Ppsdanghoang1987No ratings yet
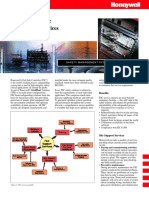
- FSC Maintenance and Support Services: Safety Management SystemsDocument2 pagesFSC Maintenance and Support Services: Safety Management Systemsmemt0% (1)
- Distributed Control SystemDocument31 pagesDistributed Control SystemAbdullah BarkaNo ratings yet
- Orbit 60 Series System Datasheet 137M5182 PDFDocument35 pagesOrbit 60 Series System Datasheet 137M5182 PDFJuan Antonio MarinNo ratings yet
- Implementing Advanced Process Control For Refineries and Chemical PlantsDocument23 pagesImplementing Advanced Process Control For Refineries and Chemical PlantsIsaias Castro ArmendarizNo ratings yet
- 002-MHIAC - PPT - Presentation IEC-61131 3 StandardDocument47 pages002-MHIAC - PPT - Presentation IEC-61131 3 StandardEder JuárezNo ratings yet
- Reliability Centred Maintenance (RCM)Document9 pagesReliability Centred Maintenance (RCM)GraceNo ratings yet
- In House Programs 2015 EngineeringDocument6 pagesIn House Programs 2015 EngineeringKURNIAWANNo ratings yet
- 15EI321E Analytical Instrumentation: A.Asuntha A.P (SR.G), SRM University, Asuntha.a@ktr - Srmuniv.ac - inDocument99 pages15EI321E Analytical Instrumentation: A.Asuntha A.P (SR.G), SRM University, Asuntha.a@ktr - Srmuniv.ac - inAnil MNo ratings yet
- Training Module: AnalysersDocument28 pagesTraining Module: Analysersmilton1987No ratings yet
- Sampling TechniquesDocument17 pagesSampling TechniquesDebjyoti SanyalNo ratings yet
- Distributed Control System - OverviewDocument7 pagesDistributed Control System - OverviewGeorge MarkasNo ratings yet
- Define? - Purpose of Using DCS?Document30 pagesDefine? - Purpose of Using DCS?deep_the_creepNo ratings yet
- Modbus FAQDocument5 pagesModbus FAQspoof183No ratings yet
- The Role of Gas Chromatography in Compositional Analyses in The Petroleum Industry PDFDocument16 pagesThe Role of Gas Chromatography in Compositional Analyses in The Petroleum Industry PDFPiyush SinhaNo ratings yet
- Section 10 Humans in ControlDocument64 pagesSection 10 Humans in ControlAhmed FaragNo ratings yet
- Calibration Excellence Intelligent Application of Smart Technology 111130151117 Phpapp01Document29 pagesCalibration Excellence Intelligent Application of Smart Technology 111130151117 Phpapp01Oula Hatahet100% (1)
- Difference Between DCS & PLC SystemsDocument9 pagesDifference Between DCS & PLC Systemsmtrj59No ratings yet
- Chapter 27 Gas ChromatographyDocument37 pagesChapter 27 Gas Chromatographysenthilkumar99No ratings yet
- CM2 HGC100 2001 17Document154 pagesCM2 HGC100 2001 17kardoszoltanNo ratings yet
- CAP Short PresentationDocument12 pagesCAP Short Presentationsalic2013No ratings yet
- VC 6000Document8 pagesVC 6000simbamikeNo ratings yet
- Qmi Em5 ManualDocument88 pagesQmi Em5 ManualBenja87No ratings yet
- Advances in Control Loop OptimizationDocument6 pagesAdvances in Control Loop OptimizationPedro OleskoNo ratings yet
- 00-Corporate Presentation Ben 2007-10-08Document15 pages00-Corporate Presentation Ben 2007-10-08Malik HamzaNo ratings yet
- Rosemount Process Radar in Power Applications: Best Practices User GuideDocument96 pagesRosemount Process Radar in Power Applications: Best Practices User Guiderob13gerezNo ratings yet
- Basic Concept of DCSDocument11 pagesBasic Concept of DCSWidodo Pudji MuljantoNo ratings yet
- Selection GuideDocument65 pagesSelection GuideAdnan HayatNo ratings yet
- PLCDocument84 pagesPLCHanut MathurNo ratings yet
- Centum VP Maintenance PDFDocument2 pagesCentum VP Maintenance PDFdaviqueirozdemedeirosNo ratings yet
- ZigBee Standard Implementation For A Wireless Temperature SystemDocument46 pagesZigBee Standard Implementation For A Wireless Temperature SystemKurniawan SaputraNo ratings yet
- Tuning Pid LoopsDocument3 pagesTuning Pid Loopsgaol_bird009No ratings yet
- Wireless Energy Monitoring SystemDocument68 pagesWireless Energy Monitoring SystemKurniawan SaputraNo ratings yet
- The Art of Tank GaugingDocument26 pagesThe Art of Tank Gaugingnixsol75No ratings yet
- Valve Size ManualDocument43 pagesValve Size Manualarthur_toafkNo ratings yet
- 122 32450 Xbeetutorial v1.0.1 PDFDocument163 pages122 32450 Xbeetutorial v1.0.1 PDFvagner9lopes9julianaNo ratings yet
- Siemens ValvesDocument230 pagesSiemens ValvesMohamed Hamdy100% (1)
- Working - with.XBee-Final ZBNetwk 100328Document5 pagesWorking - with.XBee-Final ZBNetwk 100328Kurniawan SaputraNo ratings yet
- Safety Instrumented SystemsDocument10 pagesSafety Instrumented Systemsalif_rachman_3No ratings yet
- 293application Solutions WiressDocument8 pages293application Solutions WiressKurniawan SaputraNo ratings yet
- QUARTER 3, WEEK 9 ENGLISH Inkay - PeraltaDocument43 pagesQUARTER 3, WEEK 9 ENGLISH Inkay - PeraltaPatrick EdrosoloNo ratings yet
- K Unit 1 SeptemberDocument2 pagesK Unit 1 Septemberapi-169447826No ratings yet
- Parathyroid Agents PDFDocument32 pagesParathyroid Agents PDFRhodee Kristine DoñaNo ratings yet
- HTMLDocument115 pagesHTMLBoppana yaswanthNo ratings yet
- ADDICTED (The Novel) Book 1 - The Original English TranslationDocument1,788 pagesADDICTED (The Novel) Book 1 - The Original English TranslationMónica M. Giraldo100% (7)
- If He Asked YouDocument10 pagesIf He Asked YouLourdes MartinsNo ratings yet
- Shreya Keshari PDFDocument75 pagesShreya Keshari PDFANKIT SINGHNo ratings yet
- Rosa Chavez Rhetorical AnalysisDocument7 pagesRosa Chavez Rhetorical Analysisapi-264005728No ratings yet
- Associate-Shopping in Hyderabad, Telangana Careers at HyderabadDocument1 pageAssociate-Shopping in Hyderabad, Telangana Careers at HyderabadpavanNo ratings yet
- Message To St. MatthewDocument3 pagesMessage To St. MatthewAlvin MotillaNo ratings yet
- Colour Communication With PSD: Printing The Expected With Process Standard Digital!Document22 pagesColour Communication With PSD: Printing The Expected With Process Standard Digital!bonafide1978No ratings yet
- Module 7 - Prob D-E Valuation and Concepts AnswersDocument3 pagesModule 7 - Prob D-E Valuation and Concepts Answersvenice cambryNo ratings yet
- Diexis in Red by Taylor SwiftDocument11 pagesDiexis in Red by Taylor SwiftNirmana ArtstikaNo ratings yet
- SOCI 223 Traditional Ghanaian Social Institutions: Session 1 - Overview of The CourseDocument11 pagesSOCI 223 Traditional Ghanaian Social Institutions: Session 1 - Overview of The CourseMonicaNo ratings yet
- Math 209: Numerical AnalysisDocument31 pagesMath 209: Numerical AnalysisKish NvsNo ratings yet
- Formulating A PICOT QuestionDocument4 pagesFormulating A PICOT QuestionKarl RobleNo ratings yet
- Educ 323 - The Teacher and School Curriculum: Course DescriptionDocument16 pagesEduc 323 - The Teacher and School Curriculum: Course DescriptionCherry Lyn GaciasNo ratings yet
- Modern State and Contemporaray Global GovernanceDocument34 pagesModern State and Contemporaray Global GovernancePhoebe BuffayNo ratings yet
- Fundamentals of Biochemical Engineering Dutta Solution ManualDocument6 pagesFundamentals of Biochemical Engineering Dutta Solution Manualhimanshu18% (22)
- Laser 1Document22 pagesLaser 1Mantu KumarNo ratings yet
- Infinitives or Gerunds PDFDocument2 pagesInfinitives or Gerunds PDFRosa 06No ratings yet
- The Squeezing Potential of Rocks Around Tunnels Theory and PredictionDocument27 pagesThe Squeezing Potential of Rocks Around Tunnels Theory and PredictionprazNo ratings yet
- Sancticity AllDocument21 pagesSancticity AllJames DeHart0% (1)
- Final Draft Basel II DissertationDocument110 pagesFinal Draft Basel II DissertationWilliam Weru80% (5)
- A Triumph of Surgery EnglishDocument13 pagesA Triumph of Surgery EnglishRiya KumariNo ratings yet
- PublicadministrationinthephilippinesDocument29 pagesPublicadministrationinthephilippinesGorby ResuelloNo ratings yet
- Chapter 6 Coming of SpainDocument4 pagesChapter 6 Coming of SpainJayvee MacapagalNo ratings yet
- Dictums of Famous ArchitectsDocument3 pagesDictums of Famous ArchitectsErwin Ariola100% (2)
- Project Level 2Document5 pagesProject Level 2Alexa GonzalezNo ratings yet
- Investigative Project Group 8Document7 pagesInvestigative Project Group 8Riordan MoraldeNo ratings yet
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (55)
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Algorithms to Live By: The Computer Science of Human DecisionsFrom EverandAlgorithms to Live By: The Computer Science of Human DecisionsRating: 4.5 out of 5 stars4.5/5 (722)
- Defensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityFrom EverandDefensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityRating: 5 out of 5 stars5/5 (1)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- Cyber War: The Next Threat to National Security and What to Do About ItFrom EverandCyber War: The Next Threat to National Security and What to Do About ItRating: 3.5 out of 5 stars3.5/5 (66)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (227)
- Chaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyFrom EverandChaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyRating: 3.5 out of 5 stars3.5/5 (111)
- CompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideFrom EverandCompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideRating: 5 out of 5 stars5/5 (2)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)
- The Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectFrom EverandThe Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectRating: 4.5 out of 5 stars4.5/5 (20)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesFrom EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesRating: 4.5 out of 5 stars4.5/5 (13)
- Dark Data: Why What You Don’t Know MattersFrom EverandDark Data: Why What You Don’t Know MattersRating: 4.5 out of 5 stars4.5/5 (3)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewFrom EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (104)
- The Internet Con: How to Seize the Means of ComputationFrom EverandThe Internet Con: How to Seize the Means of ComputationRating: 5 out of 5 stars5/5 (6)
- Data-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseFrom EverandData-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseRating: 3.5 out of 5 stars3.5/5 (12)
- Power and Prediction: The Disruptive Economics of Artificial IntelligenceFrom EverandPower and Prediction: The Disruptive Economics of Artificial IntelligenceRating: 4.5 out of 5 stars4.5/5 (38)
- Demystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)From EverandDemystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)Rating: 4 out of 5 stars4/5 (1)
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkFrom EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkRating: 4 out of 5 stars4/5 (7)