IJSTE - International Journal of Science Technology & Engineering | Volume 3 | Issue 11 | May 2017
ISSN (online): 2349-784X
Optimum Placement of DG Units using CPF
Method
Mr. Mahesh K. Mangukiya Mr. Subhash M. Savani
Assistant Professor Department of Electrical Engineering
Department of Electrical Engineering College of Engineering, Pune-411005,
Shree Swami Atmanand Saraswati Institute of Technology, India
Surat
Abstract
In this paper, a method for placement of distributed generation (DG) units has been presented .This method is based on the analysis
of power flow continuation and determination of most sensitive buses to voltage collapse. This method is implemented on a IEEE
14-bus test system and yields efficiency in improvement of voltage profile and reduction of power losses; it also may permit an
increase in power transfer capacity, maximum loading, and voltage stability margin. The proposed method to determine the loading
will be very useful for Transmission system planning, optimum placement of shunt capacitors, DG Units, network reconfiguration,
etc.
Keywords: Continuation Power Flow (CPF), voltage collapse, voltage stability, distributed generation (DG)
________________________________________________________________________________________________________
I. INTRODUCTION
The newly introduced distributed or decentralized generation units connected to systems are, in general, not dispatch able by a
central operator, but they can have a significant impact on the power-flow, voltage profile, stability, continuity, and quality of
power supply for customers and electricity suppliers. The exact output power of some distributed generations (DGs) such as photo-
voltaic energy converters and wind turbines depends on the weather and cannot be anticipated accurately. Due to the locally
available resources and the small scale, DG units are mostly connected at the distribution level. When the penetration of DG is
high, the generated power of DG units not only alters the power flow in the distribution system, but also in the transmission system.
As a consequence, the connection of DG to the network may influence the stability of the power system, i.e., angle, frequency, and
voltage stability. It might also have an impact on the protection selectivity, and the frequency and voltage control of the system.
This report presents a method for placement of DG units in power system. This method is based on the analysis of power-flow
continuation and determination of most sensitive buses to the voltage collapse. After that, the DG units with certain capacity will
be installed in these buses via an objective function and an iterative algorithm.
In this algorithm, continuation power-flow method is used for determination of the voltage collapse point or maximum loading,
however; it is needed to investigate the impact of DG technologies on static voltage stability and analysis tools for studying of
voltage stability. This method will be executed on an IEEE 14-bus test system.
II. CPF METHOD
The use of steady state continuation program is now well established and explanation of the continuation power flow (CPF) method.
The continuation method can be implemented with any set of power system equilibrium equations although common descriptions
of the programs often assume the standard power-flow equations. The CPF method is a numerical method that is used to trace the
trajectory of a power system from a stable equilibrium point up to a bifurcation point.Such a method employs the following model:
(1)
Where y represents the state variables and is a system parameter used to drive the system from one equilibrium point to another.
Because a set of power-flow equations suffices for such a model, it has been employed for voltage collapse studies, which can be
considered as the system load/generation increase factor. The predictor step, used to indicate a direction to move. The tangent
vector may be used for this purpose. It is given by
(2)
Where J is the power-flow Jacobian matrix and P and Q are the net active and reactive powers connected to each bus. The entries
of 𝜏𝑝 are in terms of angle changes ∆𝜃 and ∆𝑉 .
The predictor step size is given by
(3)
All rights reserved by www.ijste.org 267
Optimum Placement of DG Units using CPF Method
(IJSTE/ Volume 3 / Issue 11 / 051)
Where ||. || stands for tangent vector norm. Thus, the steeper the curve, the smaller the predictor step. It makes the method take
bigger steps when the system is away from the bifurcation point, and smaller steps as the bifurcation is approached. The actual
operating point is obtained by the help of the corrector stage, which is obtained from inclusion of an extra equation. This equation
comes from the fact that the predictor and corrector vectors are orthogonal. If the predictor step is given as an initial guess for a
power-flow program at the corrector point, the algorithm converges rapidly to a feasible operating point. Using the CPF, it is
possible to solve the problem. So that attain to the maximum loading point due to voltage collapse. More important, however, that
it is possible to determine the Jacobian matrix at this operating point. The Jacobian matrix will be most useful tool for purposes of
selecting the locations where additions and changes of the system from the perspective of market power should take place. The
CPF method implemented in a predictor step is realized by the computation of the tangent vector and a corrector step that can be
obtained either by means of a local parameterization or a perpendicular intersection.
Predictor Step: At a generic equilibrium point, we have the following relation:
(4)
And the tangent vector can be approximated by
(5)
a step size control k has to be chosen for determining the increment ∆𝑦𝑝 and ∆𝜆𝑝, along with a normalization to avoid large step
when ||𝜏𝑝|| is large
(6)
(7)
Where𝐾 = ±1 , and its sign determines the increase or the decrease of λ. Fig. 1 presents a pictorial representation of the predictor
step.
Fig. 1: CPF predictor step obtained by means of tangent vector.
Corrector Step: In the corrector step, a set of n+ 1 equation is solved
(8)
(9)
Where the solution of g must be in the bifurcation manifold and 𝜌 is an additional equation to guarantee a nonsingular set at the
bifurcation point. For the choice of 𝜌, there are two options: the perpendicular intersection and the local parameterization. In the
case of perpendicular intersection, whose pictorial representation is illustrated in Fig. 2, the expression of 𝜌 becomes,
(10)
Whereas for the local parameterization, either the parameter λ or a variable yi is forced to be a fixed value
(11)
(12)
All rights reserved by www.ijste.org 268
Optimum Placement of DG Units using CPF Method
(IJSTE/ Volume 3 / Issue 11 / 051)
The choice of the variable to be fixed depends on the bifurcation manifold of g.
Fig. 2: CPF corrector step obtained by means of perpendicular intersection.
III. VOLTAGE COLLAPSE
Voltage collapse is an instability of heavily loaded electric power systems which leads to declining voltages and blackout. It is
associated with bifurcation and reactive power limitations of the power system. Power systems are expected to become more
heavily loaded in the future decade as the demand for electric power rises while economic and environmental concerns limit the
construction of new transmission and generation capacity.
Heavily loaded power systems are closer to their stability limits and volt-age collapse blackouts will occur if suitable monitoring
and control measures are not taken. It is important to understand mechanisms of voltage collapse so that voltage collapse blackouts
may be effectively prevented.
IV. DG PLACEMENT ALGORITHM
Fig. 3: Flowchart of DG Placement method.
All rights reserved by www.ijste.org 269
Optimum Placement of DG Units using CPF Method
(IJSTE/ Volume 3 / Issue 11 / 051)
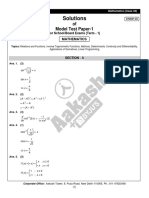
V. CASE STUDY & RESULT
This method was executed on a IEEE 14-bus test system (see Appendix I) and the results presented the robustness of this method
for optimal and fast placement of DG units. Fig. 4 shows voltage collapse profile curve in a IEEE 14-bus test system in normal
state and three iterations of placement algorithm. In every iteration of placement algorithm, one DG unit was installed in this
system. In first iteration, the DG unit was installed in bus 14, in second iteration in bus 5, and in the third iteration in bus 10. Table
1 represents the effect of execution of this method on power losses, maximum loading and voltage stability margin. By execution
of this method, the total active power losses was reduced to 48.78%. However, maximum loading and voltage stability margin of
the system were increased about 2.9% and 74.35%, respectively, (see Fig. 4 for these results). Note that in this case, DG units have
the same capacity and ability to produce 0.25 p.u. active and 0.25 p.u. reactive powers. Fig. 5 shows voltage profile curve for IEEE
14-bus test system.
Fig. 4: Effect of placement DG units on maximum loading and voltage stability margin (IEEE-14 Bus system).
Fig. 5: Voltage profile curve for an IEEE 14-bus test network with DG units.
All rights reserved by www.ijste.org 270
Optimum Placement of DG Units using CPF Method
(IJSTE/ Volume 3 / Issue 11 / 051)
Table – 1
Effects of proposed method on power losses, maximum loading and voltage stability margin on IEEE 14-Bus system
VI. CONCLUSION
In this paper, a method for placement of DG units in transmission network based on CPF approach is presented. The results of
implemented of this method on a Sample IEEE 14-bus test system are obtained with and without DG units. The method is simple
and straight forward, because one has to simply observe the voltages at weak buses at the voltage collapse point, which are obtained
at the end of CPF solution. The identified buses are selected for deciding location of DG units. The results showed efficiency of
this method for improvement of voltage profile, reduction of power losses and also an increase in maximum loading and voltage
stability margin. This method can be used for placement of compensators and large DG units in power systems.
APPENDIX
IEEE 14-Bus Test System
Generator Data :
Base: SB=100 MVA and VB=20 KV
Slack generator: Voltage 1 p.u.
DG units: PV controlled, Volatage 1 p.u, P DG= 25 MW and DDG= 25 MVar.
Bus and transmission Lines Data: Table1, Table2.
Operational voltage limit at all PQ buses: V min ≤ Vi ≤ Vmax → 0:95 ≤ Vi ≤ 1:05 p.u.
Table – 1
Bus Data of sample IEEE 14-bus test system
All rights reserved by www.ijste.org 271
Optimum Placement of DG Units using CPF Method
(IJSTE/ Volume 3 / Issue 11 / 051)
Table – 2
Line Data of sample IEEE 14-bus test system
REFERENCES
[1] D. V. D. T. Vu Van, J. Driesen and R. Belmans, “Power quality and voltage stability of distribution systems with considerable distributed generation
penetration,” Power Delivery, IEEE Trans.
[2] D. J. T. M. K. Donnelly, J. E. Dagle and G. J. Rogers, “Impacts of the distributed utility on transmission system stability,” Power System, IEEE Trans., vol.
11, pp. 741–746, May 1996.
[3] P. H. S. W. L. K. M. Reza, J. G. Slootweg and L. vander, “Investigating impacts of distributed generation on transmission system stability,” Power System,
IEEE PowerTech., June 2003.
[4] S. N. S. M. Rav and M. W. Yih-heui, “Optimum location of resources in distributed planning,” Power System, IEEE Trans., vol. 9, pp. 2014–2020, November
1994.
[5] N. S. RAU and Y. H. WAN, “Optimum location of resources in distributed planning,” Power System, IEEE Trans., vol. 9, pp. 2014–2020, November 1994.
[6] D. S. T. Griffin, K. Tomsovic and A. Low, “Placement of dispersed generations systems for reduced losses,” IEEE 33rd Annu. Hawaii Int. Conf. Syst.
Sciences (HICSS), 2000.
[7] G. CELLI and F. PILO, “Optimal distributed generation allocation in mv distribution networks,” Proc. 22nd IEEE PES Int. Conf. on Power Industry Computer
Applications (PICA 2001), May 2001.
[8] C. A. Cnizares, “Applications of optimization to voltage collapse analysis,” IEEE Trans. on Power Engineering, July 1998.
[9] I. A. Hiskens and Y. V. Makarov, “Calculation of power system critical loading conditions,” Proc. Electrical Engineering Congr., pp. 185–189, November
1994.
[10] Y. Kataoka, “A probabilistic nodal loading model and worst case solutions for electric power system voltage stability assessment,” IEEE Trans. Power Syst.,
vol. 18, pp. 1507– 1514, November 2003.
[11] I. Dobson and L. Lu, “Voltage collapse precipitated by the immediate change in stability when generator reactive power limits are encountered,” IEEE Trans.
Circuits Syst., vol. 39, pp. 762–766, September 1992.
[12] K. S. S. H. D. Chiang, A. Flueck and N. Balu, “Cpflow: A practical tool for tracing power system steady-state stationary behavior due to load and generation
variations,” IEEE Trans. Circuits Syst., vol. 10, pp. 623–634, May 1995.
[13] V. Ajjarapu and C. Christy, “The continuation power flow: A tool for steady state voltage stability analysis,” IEEE Trans. Power Syst., vol. 7, pp. 416–423,
February 1992.
[14] J. V. Milanovic and T. M. David, “Stability of distribution networks with embedded generators and induction motors,” Proc. Winter Meeting Power Eng.
Soc, vol. 2, pp. 1023– 1028, 2002.
[15] I. D. S. Greene and F. L. Alvarado, “Contingency analysis for voltage collapse via sensitivities from a single nose curve,”
[16] K. Sedghisigarchi and A. Feliachi, “Control of grid-connected fuel cell power plant for transient stability enhancement,” Proc.Winter Meeting Power Eng.
Soc., vol. 1, pp. 383 – 388, 2002.
[17] T. V. Cutsem, “A method to compute reactive power margins with respect to voltage collapse,” IEEE Trans. Power Syst., vol. 6, pp. 145–156, February 1991.
All rights reserved by www.ijste.org 272
You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Synopsys Design Vision TutorialDocument23 pagesSynopsys Design Vision TutorialferrariNo ratings yet
- Excel Solver Upgrade GuideDocument17 pagesExcel Solver Upgrade Guideankurlibra100% (1)
- FPGA Implementation of High Speed Floating Point Mutliplier Using Log Based DesignDocument4 pagesFPGA Implementation of High Speed Floating Point Mutliplier Using Log Based DesignIJSTENo ratings yet
- Design and Analysis of Magneto Repulsive Wind TurbineDocument7 pagesDesign and Analysis of Magneto Repulsive Wind TurbineIJSTENo ratings yet
- Automatic Generation Control in Three-Area Power System Operation by Using "Particle Swarm Optimization Technique"Document8 pagesAutomatic Generation Control in Three-Area Power System Operation by Using "Particle Swarm Optimization Technique"IJSTENo ratings yet
- Optimization of Overall Efficiency Using Facilities Planning in Ropp Cap Making IndustryDocument8 pagesOptimization of Overall Efficiency Using Facilities Planning in Ropp Cap Making IndustryIJSTENo ratings yet
- Multipurpose Scheme of Workshop Exhaust System For Ventilation and Electrical Power GenerationDocument9 pagesMultipurpose Scheme of Workshop Exhaust System For Ventilation and Electrical Power GenerationIJSTENo ratings yet
- A Mixture of Experts Model For ExtubationDocument4 pagesA Mixture of Experts Model For ExtubationIJSTENo ratings yet
- Optimization of Treatability by FACCO For Treatment of Chemical Industry EffluentDocument9 pagesOptimization of Treatability by FACCO For Treatment of Chemical Industry EffluentIJSTENo ratings yet
- RFID Based Toll Gate AccessDocument5 pagesRFID Based Toll Gate AccessIJSTENo ratings yet
- A Comprehensive Survey of Techniques/Methods For Content Based Image Retrieval SystemDocument6 pagesA Comprehensive Survey of Techniques/Methods For Content Based Image Retrieval SystemIJSTENo ratings yet
- Partial Replacement of Fine Aggregate With Iron Ore Tailings and Glass PowderDocument7 pagesPartial Replacement of Fine Aggregate With Iron Ore Tailings and Glass PowderIJSTENo ratings yet
- Development of Relationship Between Saturation Flow and Capacity of Mid Block Section of Urban Road - A Case Study of Ahmedabad CityDocument6 pagesDevelopment of Relationship Between Saturation Flow and Capacity of Mid Block Section of Urban Road - A Case Study of Ahmedabad CityIJSTENo ratings yet
- Effect of RIB Orientation in Isogrid Structures: Aerospace ApplicationsDocument9 pagesEffect of RIB Orientation in Isogrid Structures: Aerospace ApplicationsIJSTENo ratings yet
- A Cloud Based Healthcare Services For Remote PlacesDocument4 pagesA Cloud Based Healthcare Services For Remote PlacesIJSTENo ratings yet
- A Radar Target Generator For Airborne TargetsDocument8 pagesA Radar Target Generator For Airborne TargetsIJSTENo ratings yet
- Enriching Gum Disease Prediction Using Machine LearningDocument6 pagesEnriching Gum Disease Prediction Using Machine LearningIJSTENo ratings yet
- An Implementation and Design A Customized Advanced Image Editor Using Image Processing in MatlabDocument5 pagesAn Implementation and Design A Customized Advanced Image Editor Using Image Processing in MatlabIJSTENo ratings yet
- Technology Advancement For Abled PersonDocument9 pagesTechnology Advancement For Abled PersonIJSTENo ratings yet
- The Bicycle As A Mode Choice - A Gendered ApproachDocument4 pagesThe Bicycle As A Mode Choice - A Gendered ApproachIJSTENo ratings yet
- Onerider The Bike TaxiDocument3 pagesOnerider The Bike TaxiIJSTENo ratings yet
- Comparative Study and Analysis of PCC Beam and Reinforced Concrete Beam Using GeogridDocument7 pagesComparative Study and Analysis of PCC Beam and Reinforced Concrete Beam Using GeogridIJSTENo ratings yet
- Optimizing Turning Process For EN43 by Taguchi Method Under Various Machining ParametersDocument4 pagesOptimizing Turning Process For EN43 by Taguchi Method Under Various Machining ParametersIJSTENo ratings yet
- Research On Storage Privacy Via Black Box and Sanitizable SignatureDocument6 pagesResearch On Storage Privacy Via Black Box and Sanitizable SignatureIJSTENo ratings yet
- App-Based Water Tanker Booking, Monitoring & Controlling SystemDocument6 pagesApp-Based Water Tanker Booking, Monitoring & Controlling SystemIJSTENo ratings yet
- Wireless Information Process and Power Transfer in Single-User OFDM SystemDocument6 pagesWireless Information Process and Power Transfer in Single-User OFDM SystemIJSTENo ratings yet
- Using The Touch-Screen Images For Password-Based Authentication of IlliteratesDocument6 pagesUsing The Touch-Screen Images For Password-Based Authentication of IlliteratesIJSTENo ratings yet
- Interstage Construction Techniques For Mass Gain: An OverviewDocument5 pagesInterstage Construction Techniques For Mass Gain: An OverviewIJSTENo ratings yet
- Duplicate Detection Using AlgorithmsDocument3 pagesDuplicate Detection Using AlgorithmsIJSTENo ratings yet
- An Implementation of Maximum Power Point Tracking Algorithms For Photovoltaic Systems Using Matlab and Arduino Based RTOS SystemDocument5 pagesAn Implementation of Maximum Power Point Tracking Algorithms For Photovoltaic Systems Using Matlab and Arduino Based RTOS SystemIJSTENo ratings yet
- Programming Assignment 1 - Particle Swarm OptimizationDocument2 pagesProgramming Assignment 1 - Particle Swarm OptimizationY SAHITHNo ratings yet
- Generalización de La Desigualdad de HölderDocument5 pagesGeneralización de La Desigualdad de HölderDavid SanchezNo ratings yet
- An Overview of Optimization Techniques For CNC Milling MachineDocument4 pagesAn Overview of Optimization Techniques For CNC Milling MachineAllaboyinamahidharNo ratings yet
- Optimizing CO2 Flooding Efficiency Under UncertaintyDocument3 pagesOptimizing CO2 Flooding Efficiency Under Uncertaintyoppai.gaijinNo ratings yet
- Models - Rf.bowtie Antenna OptimizationDocument14 pagesModels - Rf.bowtie Antenna OptimizationbkmmizanNo ratings yet
- Independent University, Bangladesh SEMESTER: AUTUMN-2020/MGT 340Document3 pagesIndependent University, Bangladesh SEMESTER: AUTUMN-2020/MGT 340Shuvo DattaNo ratings yet
- Geometria PLDocument32 pagesGeometria PLjhdmssNo ratings yet
- Brochure LMS Virtual - Lab MotionDocument20 pagesBrochure LMS Virtual - Lab MotionAldo A. MamaniNo ratings yet
- A Maximal Covering Location Model in The Presence of Partial CoverageDocument12 pagesA Maximal Covering Location Model in The Presence of Partial Coveragerodolfo123456789No ratings yet
- ITED Dessislava Pachamanova Introducing Integer Modeling With Excel Solver EvenStarSolutionDocument12 pagesITED Dessislava Pachamanova Introducing Integer Modeling With Excel Solver EvenStarSolutionNadeem KhanNo ratings yet
- Aakash Model Test Papers Solutions XII T1 MathematicsDocument30 pagesAakash Model Test Papers Solutions XII T1 MathematicsJatinNo ratings yet
- Ciao AlgorithmDocument13 pagesCiao AlgorithmDiegoHenaoLeonNo ratings yet
- GE Jet Engine Bracket ChallengeDocument3 pagesGE Jet Engine Bracket Challengejrrt fisatNo ratings yet
- M.tech (Chem) R13Document54 pagesM.tech (Chem) R13Siva Jagadish Kumar MNo ratings yet
- Optimal Design of A Gas Transmission Network - A Case Study of The PDFDocument102 pagesOptimal Design of A Gas Transmission Network - A Case Study of The PDFMilos BajicNo ratings yet
- ADMAT User's Guide: Automatic Differentiation ToolboxDocument103 pagesADMAT User's Guide: Automatic Differentiation Toolboxalawi747594No ratings yet
- Introduction To The Theory of Neural ComputationDocument18 pagesIntroduction To The Theory of Neural ComputationJon Arnold GreyNo ratings yet
- Production of Lipase Using Cassava Peel and Sunflower Oil in Solid-State Fermentation - Preliminary StudyDocument7 pagesProduction of Lipase Using Cassava Peel and Sunflower Oil in Solid-State Fermentation - Preliminary StudyAgriculturaldavidNo ratings yet
- Weka Tutorial 3Document50 pagesWeka Tutorial 3Faris DhaqNo ratings yet
- Operations Research SyllabusDocument2 pagesOperations Research SyllabusKiruba ShankerNo ratings yet
- A.G4.Forward Reserve Warehousing and AllocationDocument19 pagesA.G4.Forward Reserve Warehousing and AllocationGirish Ranjan MishraNo ratings yet
- Exergy Analysis Versus Pinch Technology: July 2002Document6 pagesExergy Analysis Versus Pinch Technology: July 2002Arash AbbasiNo ratings yet
- Jsendh Steng-11798Document14 pagesJsendh Steng-11798José Manuel SoriaNo ratings yet
- Mechatronic Design ApproachDocument49 pagesMechatronic Design ApproachRaghulNo ratings yet
- Applying A Genetic Algorithm To The Traveling Salesman ProblemDocument10 pagesApplying A Genetic Algorithm To The Traveling Salesman ProblemLuciano Ernesto Carhuaricra RiveraNo ratings yet
- Gas Network Optimization by MINLPDocument260 pagesGas Network Optimization by MINLPGustavo Gonzalez ServaNo ratings yet
- 4.2 Extremum ProblemDocument92 pages4.2 Extremum ProblemhaziqemarwaiNo ratings yet
- Komputasi Proses: Program Studi Teknik Kimia Institut Teknologi IndonesiaDocument9 pagesKomputasi Proses: Program Studi Teknik Kimia Institut Teknologi IndonesiaVido AdityaNo ratings yet