You might also like
- Zhang 2010Document4 pagesZhang 2010marcosfelipesscNo ratings yet
- SESM3004 Fluid Mechanics: DR Anatoliy VorobevDocument16 pagesSESM3004 Fluid Mechanics: DR Anatoliy VorobevRN Builder IpohNo ratings yet
- A Mathematical Scheme Defined on Strictly Rectangular Complex Matrix Spaces Involving Frobenius Norm Preservation Under the Possibility of Matrix Rank Readjustment and Internal Redistribution of Variance Using Spacer CoDocument12 pagesA Mathematical Scheme Defined on Strictly Rectangular Complex Matrix Spaces Involving Frobenius Norm Preservation Under the Possibility of Matrix Rank Readjustment and Internal Redistribution of Variance Using Spacer CoInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Inverse Z-Transform: Instructor: Dr. Ghazi Al Sukkar Dept. of Electrical Engineering The University of Jordan EmailDocument31 pagesThe Inverse Z-Transform: Instructor: Dr. Ghazi Al Sukkar Dept. of Electrical Engineering The University of Jordan EmailWasif IjazNo ratings yet
- The Slope of Regression For Kriging Estimators: BackgroundDocument4 pagesThe Slope of Regression For Kriging Estimators: BackgroundArthurNo ratings yet
- TO Dynamics Analysis OF Robots (Part 5)Document27 pagesTO Dynamics Analysis OF Robots (Part 5)ManojKumar MNo ratings yet
- Finite Element Method For Structural Dynamic and Stability AnalysesDocument49 pagesFinite Element Method For Structural Dynamic and Stability AnalysesabimalainNo ratings yet
- Introduction To Electrical Engineering: Lecture 9 - 10Document35 pagesIntroduction To Electrical Engineering: Lecture 9 - 10satya prakashNo ratings yet
- Stresses in Soil Mass (Das, Chapter 10) Sections: All Except 10.1, 10.2, 10.5, 10.11Document23 pagesStresses in Soil Mass (Das, Chapter 10) Sections: All Except 10.1, 10.2, 10.5, 10.11jabbarNo ratings yet
- Visula ServoingDocument81 pagesVisula Servoingpham tamNo ratings yet
- Phys 1 Memo Vizsga 2012Document14 pagesPhys 1 Memo Vizsga 2012BlazsNo ratings yet
- 6 Deflection and BucklingDocument13 pages6 Deflection and BucklingJ.p. ZhuNo ratings yet
- Lecture - 4-5 - Bending MomentDocument15 pagesLecture - 4-5 - Bending Momentأحمد شبانهNo ratings yet
- DynamicsDocument41 pagesDynamicsHùng TrầnNo ratings yet
- Bending Deflection - Macaulay Step Functions: AE1108-II: Aerospace Mechanics of MaterialsDocument9 pagesBending Deflection - Macaulay Step Functions: AE1108-II: Aerospace Mechanics of MaterialsAyanwale-cole pelumi AkeemNo ratings yet
- Deflection Via Step FunctionsDocument9 pagesDeflection Via Step FunctionsAyanwale-cole pelumi AkeemNo ratings yet
- 00-Theory-K T GDocument6 pages00-Theory-K T GVikrant NirgudeNo ratings yet
- Chapter 7. Deflection On BeamDocument51 pagesChapter 7. Deflection On BeamLam TranNo ratings yet
- Jacobian: Dr. Shady A. MagedDocument44 pagesJacobian: Dr. Shady A. MagedpeterwalidNo ratings yet
- IV Design of Discrete Time Control System by Conventional MethodsDocument28 pagesIV Design of Discrete Time Control System by Conventional MethodsYeshitila HailuNo ratings yet
- Manipulator Kinematics Set 2 PDFDocument56 pagesManipulator Kinematics Set 2 PDFmohammad sammeerNo ratings yet
- Straight Lines PDFDocument6 pagesStraight Lines PDFCoc LegendNo ratings yet
- 11.stresses in Soil Mass 16-9Document23 pages11.stresses in Soil Mass 16-9Samirsinh ParmarNo ratings yet
- Fault Analysis in Four-Wire Distribution NetworksDocument15 pagesFault Analysis in Four-Wire Distribution NetworksAstuty MahyuddinNo ratings yet
- Jim Hefferon Linear Algebra Answers To QuestionsDocument214 pagesJim Hefferon Linear Algebra Answers To QuestionsZhandos ZhandosNo ratings yet
- Modeling and Control of Autonomous UnderDocument10 pagesModeling and Control of Autonomous Underaicha sediniNo ratings yet
- Inverse Z TransformDocument16 pagesInverse Z Transformeee06sharifNo ratings yet
- Yn Ayn Aynn BXN BXNN: Recursive FiltersDocument28 pagesYn Ayn Aynn BXN BXNN: Recursive FiltersHarreniNo ratings yet
- ZT Lecture-4Document13 pagesZT Lecture-4322103312181 SAI ANAND MEDAPATINo ratings yet
- Mars Orbit Calculation: Klaas Hartmann November 4, 2002Document13 pagesMars Orbit Calculation: Klaas Hartmann November 4, 2002Klaas HartmannNo ratings yet
- Schäfer PdfaDocument2 pagesSchäfer PdfaMontage MotionNo ratings yet
- Ana Num 1Document11 pagesAna Num 1manoj27No ratings yet
- Ipho Training Special Theory of RelativityDocument35 pagesIpho Training Special Theory of RelativityWee Choi ChiangNo ratings yet
- Homework SolutionDocument13 pagesHomework Solutionguadbe878No ratings yet
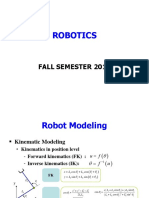
- Robotics: Fall Semester 2019Document23 pagesRobotics: Fall Semester 2019Saad Ikram CheemaNo ratings yet
- Introduction To Computer VisionDocument19 pagesIntroduction To Computer Visionrexfordbentilz zNo ratings yet
- Chapter 2Document23 pagesChapter 2Ahmed MohamedNo ratings yet
- A New Type of Arc Plasma Reactor With Twelve-Phase Alternating Current Discharge For Synthesis of Carbon NanotubesDocument6 pagesA New Type of Arc Plasma Reactor With Twelve-Phase Alternating Current Discharge For Synthesis of Carbon NanotubesSalah MostafapourNo ratings yet
- Estimating The Low-Speed Sidewash Gradient On A Vertical StabilizerDocument3 pagesEstimating The Low-Speed Sidewash Gradient On A Vertical StabilizerMarco Antonio Zuñiga PerezNo ratings yet
- Planar Beam Element: University of Hertfordshire School of Engineering and TechnologyDocument11 pagesPlanar Beam Element: University of Hertfordshire School of Engineering and TechnologyWinston Eamon OgbondaNo ratings yet
- AE3211-I Systems Engineering and Aerospace DesignDocument69 pagesAE3211-I Systems Engineering and Aerospace DesignfuckNo ratings yet
- Micro ActuatorsDocument6 pagesMicro ActuatorsBilal AbbasNo ratings yet
- Quark Mixing in The Standard ModelDocument31 pagesQuark Mixing in The Standard ModelNur HadiNo ratings yet
- MITRES 6 007S11 Lec22 PDFDocument10 pagesMITRES 6 007S11 Lec22 PDFlalita pargaiNo ratings yet
- CH 6 - 1 Differential Analysis of Fluid Flow Part I WebDocument60 pagesCH 6 - 1 Differential Analysis of Fluid Flow Part I WebAmjad AliNo ratings yet
- Fa 105 S07Document7 pagesFa 105 S07haniiramosNo ratings yet
- ECE411 - 4d - The Z-TransformDocument6 pagesECE411 - 4d - The Z-TransformMartine JimenezNo ratings yet
- Dynamics Kinetics of Particles Curviliear MotionDocument45 pagesDynamics Kinetics of Particles Curviliear Motionعلاء حسينNo ratings yet
- Lecture 1 IIR Digital Filter Design DGDocument16 pagesLecture 1 IIR Digital Filter Design DGAlina RazaNo ratings yet
- Aerodynamics Characteristic of Airfoil Using Panel Method-Constant Strength Doublet With Neumann Boundary ConditionDocument22 pagesAerodynamics Characteristic of Airfoil Using Panel Method-Constant Strength Doublet With Neumann Boundary ConditionBuyung JunaidinNo ratings yet
- Equations of Motion For A ParticleDocument17 pagesEquations of Motion For A ParticleChigo OchiNo ratings yet
- الحركه المنحنيهDocument19 pagesالحركه المنحنيهعلاء حسينNo ratings yet
- Introduction To Machinery Dynamics Part 3Document5 pagesIntroduction To Machinery Dynamics Part 3Fatima NusserNo ratings yet
- 3-Vehicle Equation of MotionDocument16 pages3-Vehicle Equation of MotionBira-aanuu SamuelNo ratings yet
- Surface Equation Surface Equation Ellipsoid Cone: Z C X A y B A ! B ! C X A y B Z CDocument1 pageSurface Equation Surface Equation Ellipsoid Cone: Z C X A y B A ! B ! C X A y B Z CNaomy Zeledón RiveraNo ratings yet
- AC Circuits: Fundamentals of Electric CircuitsDocument16 pagesAC Circuits: Fundamentals of Electric CircuitsHiếu Dương100% (1)
- The Inverse Z-TransformDocument16 pagesThe Inverse Z-Transformdeekshasingh96No ratings yet
- Navamathavan.r@vit - Ac.in: Dr. R. Navamathavan Physics Division School of Advanced Sciences (SAS)Document24 pagesNavamathavan.r@vit - Ac.in: Dr. R. Navamathavan Physics Division School of Advanced Sciences (SAS)Somesh MuruganNo ratings yet
- Finite Difference MethodDocument31 pagesFinite Difference MethodIvana Titana DriveNo ratings yet
- Economic and Environmental Sustainability For Aircrafts Service LifeDocument17 pagesEconomic and Environmental Sustainability For Aircrafts Service LifeRangan SrinivasanNo ratings yet
- List of DOA Issued by EASA: AustraliaDocument40 pagesList of DOA Issued by EASA: AustraliaRangan SrinivasanNo ratings yet
- Owners OperatorsGuide 737NG PDFDocument21 pagesOwners OperatorsGuide 737NG PDFWajdi Jalal Osman Kambal100% (2)
- Owners OperatorsGuide 737NG PDFDocument21 pagesOwners OperatorsGuide 737NG PDFWajdi Jalal Osman Kambal100% (2)
- List of DOA Issued by EASA: AustraliaDocument40 pagesList of DOA Issued by EASA: AustraliaRangan SrinivasanNo ratings yet
- Beginners Python Cheat Sheet PCC All PDFDocument26 pagesBeginners Python Cheat Sheet PCC All PDFName100% (1)
- Python DataScience PDFDocument9 pagesPython DataScience PDFRangan Srinivasan100% (1)
- Question Bank: Unit - I Multiple IntegralsDocument6 pagesQuestion Bank: Unit - I Multiple IntegralsRangan SrinivasanNo ratings yet
- Aerospace EngineeringDocument3 pagesAerospace EngineeringvenkatNo ratings yet
- Aerospace EngineeringDocument3 pagesAerospace EngineeringvenkatNo ratings yet
- Aerospace EngineeringDocument3 pagesAerospace EngineeringvenkatNo ratings yet
- Comments enDocument1 pageComments enRangan SrinivasanNo ratings yet
- Comments On The Assigned Levels in English: Angela Ffrench Cambridge ESOLDocument33 pagesComments On The Assigned Levels in English: Angela Ffrench Cambridge ESOLJedelosDelosRiosNo ratings yet
- Fluid Dynomiks LabDocument50 pagesFluid Dynomiks LabRangan SrinivasanNo ratings yet
- Sem 6 SyllabusDocument6 pagesSem 6 SyllabusRangan SrinivasanNo ratings yet
- Vivek Weight EstimationDocument8 pagesVivek Weight EstimationRangan SrinivasanNo ratings yet
- Chapter - 11 V-N Diagram: 11.1 STEP 1Document10 pagesChapter - 11 V-N Diagram: 11.1 STEP 1Rangan SrinivasanNo ratings yet
- Model Letter of RecommendationDocument1 pageModel Letter of RecommendationRangan SrinivasanNo ratings yet
- Performance Analysis II - Steady Climb, Descent and Glide - 3 TopicsDocument9 pagesPerformance Analysis II - Steady Climb, Descent and Glide - 3 TopicsChegrani AhmedNo ratings yet
- Aircraft Design ProjectDocument4 pagesAircraft Design ProjectRangan SrinivasanNo ratings yet
- Linear Analysis 3 03 2017Document25 pagesLinear Analysis 3 03 2017Rangan SrinivasanNo ratings yet
- Course Project Theory of Automatic ControlDocument7 pagesCourse Project Theory of Automatic ControlRangan SrinivasanNo ratings yet
- Course Project STEP by STEPDocument47 pagesCourse Project STEP by STEPRangan SrinivasanNo ratings yet
- QCA9533Document4 pagesQCA9533BasuragaCirebonNo ratings yet
- JAVA Quick Reference PDFDocument3 pagesJAVA Quick Reference PDFMohamed NazimNo ratings yet
- What Are You Doing LiveworksheetDocument18 pagesWhat Are You Doing LiveworksheetRizki Novela WatiNo ratings yet
- Lesson 3 Electronic PortfolioDocument4 pagesLesson 3 Electronic PortfolioFredDevillesValentinoNo ratings yet
- A Study of The Impact of Social Media On Consumer Buying Behaviour Submitted ToDocument25 pagesA Study of The Impact of Social Media On Consumer Buying Behaviour Submitted ToAnanya GhoshNo ratings yet
- Cubase 7 Quick Start GuideDocument95 pagesCubase 7 Quick Start Guidenin_rufaNo ratings yet
- CE-EMC CERT SHEM1806004552IT Network Camera DS-2CD2045FWD-I 20180710Document1 pageCE-EMC CERT SHEM1806004552IT Network Camera DS-2CD2045FWD-I 20180710DaniellMargaritNo ratings yet
- MOCK Exams Submission TestDocument7 pagesMOCK Exams Submission TestPam MshweshweNo ratings yet
- Puana Cell Phone Search WarrantDocument24 pagesPuana Cell Phone Search WarrantHNN67% (3)
- 2006 - Pew Future of The Internet 2Document9 pages2006 - Pew Future of The Internet 2_sdpNo ratings yet
- Timing Advance UnitDocument9 pagesTiming Advance UnitShohan Taylor50% (2)
- ControlMaestro 2010Document2 pagesControlMaestro 2010lettolimaNo ratings yet
- Presentation Report: Physics of Smart ScreenDocument7 pagesPresentation Report: Physics of Smart ScreenAli BoyNo ratings yet
- VIP400 Settings Sheet NRJED311208ENDocument2 pagesVIP400 Settings Sheet NRJED311208ENVăn NguyễnNo ratings yet
- Advanced SQL7Document2 pagesAdvanced SQL7Denmark Cartagena AsoyNo ratings yet
- Chapter 2 Conceptualized InteractionDocument32 pagesChapter 2 Conceptualized InteractionnancyNo ratings yet
- Demi KidDocument169 pagesDemi KidGagat Ragil Andaru PratomoNo ratings yet
- Manned Maneuvering Unit Design and Performance SpecificationDocument82 pagesManned Maneuvering Unit Design and Performance SpecificationBob Andrepont100% (1)
- CSProxyCache DLLDocument36 pagesCSProxyCache DLLRadient MushfikNo ratings yet
- Management Studies (CP-202) : Unit IDocument2 pagesManagement Studies (CP-202) : Unit IArman KhanNo ratings yet
- Openfoam Open Source CFD On Anselm: Supercomputing For Industry - Sc4IndustryDocument65 pagesOpenfoam Open Source CFD On Anselm: Supercomputing For Industry - Sc4IndustrytensianNo ratings yet
- Json CacheDocument10 pagesJson Cachebenjaminmishael20No ratings yet
- Aman Choudhary BCA-1 C PracticalDocument65 pagesAman Choudhary BCA-1 C PracticalPoras ChahandeNo ratings yet
- 5G Smart Port Whitepaper enDocument27 pages5G Smart Port Whitepaper enWan Zulkifli Wan Idris100% (1)
- A Bubble Text EffectDocument16 pagesA Bubble Text EffectvermaxeroxNo ratings yet
- SecASC - M02 - Azure Security Center Setup and ConfigurationDocument53 pagesSecASC - M02 - Azure Security Center Setup and ConfigurationGustavo WehdekingNo ratings yet
- Statistische Tabellen (Studenmund (2014) Using Econometrics. A Practical Guide, 6th Ed., P 539-553)Document15 pagesStatistische Tabellen (Studenmund (2014) Using Econometrics. A Practical Guide, 6th Ed., P 539-553)Рус ПолешукNo ratings yet
- Kode Program Login Dan RegisterDocument63 pagesKode Program Login Dan Registerana tazkiaNo ratings yet
- Sub QueriesDocument16 pagesSub QueriesakshayNo ratings yet
- RSA Authentication Agent 8.0 For Web For IIS 7.5, 8.0, 8.5, and 10 Installation and Configuration GuideDocument154 pagesRSA Authentication Agent 8.0 For Web For IIS 7.5, 8.0, 8.5, and 10 Installation and Configuration Guideelite20007No ratings yet