You might also like
- Les Nombres PremiersDocument12 pagesLes Nombres PremiersKarl MalongaNo ratings yet
- Cours CM1 2014 2015Document172 pagesCours CM1 2014 2015matozo100% (3)
- Cours CM1 2014 2015Document172 pagesCours CM1 2014 2015matozo100% (3)
- Course de VitesseDocument36 pagesCourse de VitesseIbra Moulay33% (3)
- Correction de La Série N°3 de MPM - 2020-2021Document9 pagesCorrection de La Série N°3 de MPM - 2020-2021MounirNo ratings yet
- Cours de PPMDocument148 pagesCours de PPMKevin Tshimanga100% (2)
- Analyse Dimensionnelle Et SimilitudeDocument31 pagesAnalyse Dimensionnelle Et SimilitudeKhalil LasferNo ratings yet
- POLY LA3T2 Mecanique MateriauxDocument165 pagesPOLY LA3T2 Mecanique MateriauxmicipsaNo ratings yet
- Etude de Projet - Fabrication de Pièces de Décolletage Pour L'automobile PDFDocument129 pagesEtude de Projet - Fabrication de Pièces de Décolletage Pour L'automobile PDFIbra Moulay100% (1)
- Exercices Corrigés de L'optique GéométriqueDocument23 pagesExercices Corrigés de L'optique GéométriqueETUSUP92% (12)
- 9 5 TD 3 Sujet PDFDocument3 pages9 5 TD 3 Sujet PDFMohamed MohamedNo ratings yet
- Cours Vibrations Chapitres1-8 VF CpressedDocument153 pagesCours Vibrations Chapitres1-8 VF CpressedMohamed CoulibalyNo ratings yet
- Ugv PDFDocument30 pagesUgv PDFKarim ZineNo ratings yet
- Cours D'analyse de Structures Par La Methode Des Elements FinisDocument58 pagesCours D'analyse de Structures Par La Methode Des Elements FinisJosué Fangu100% (1)
- GammeDocument18 pagesGammeMakrem CherifNo ratings yet
- PneumatiqueDocument18 pagesPneumatiqueamine100% (9)
- Compteurs Et AfficheursDocument2 pagesCompteurs Et Afficheursaminialaouimj100% (1)
- Superalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceFrom EverandSuperalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceNo ratings yet
- Pouvoir Pensee - Annie BesantDocument84 pagesPouvoir Pensee - Annie BesantA100% (1)
- Cours Automatique RegulationDocument139 pagesCours Automatique RegulationAhmed MallekhNo ratings yet
- 01aérodynamique v13Document15 pages01aérodynamique v13Lucas DespreauxNo ratings yet
- Méthode D'euler Pour Les EDODocument18 pagesMéthode D'euler Pour Les EDOatamed32100% (1)
- Chap 1 - Théorie Générale Des TurbomachinesDocument42 pagesChap 1 - Théorie Générale Des TurbomachinesIkram El JamaiNo ratings yet
- Animation Under SolidworksDocument8 pagesAnimation Under Solidworkskhalidzarbane100% (1)
- TD 03 - Performances Et Modélisation Des SLCI (Équa. Dif. + Laplace)Document4 pagesTD 03 - Performances Et Modélisation Des SLCI (Équa. Dif. + Laplace)bhs channelNo ratings yet
- Sne TP5Document12 pagesSne TP5Matheus Oliveira de FreitasNo ratings yet
- ATV630 650 Installation Manual FR EAV64302 04Document120 pagesATV630 650 Installation Manual FR EAV64302 04saidloubarNo ratings yet
- TP2 Vibration Mécanique AME MinishakerDocument14 pagesTP2 Vibration Mécanique AME MinishakerOmar BenadirNo ratings yet
- TP2 HysterisisDocument2 pagesTP2 Hysterisislydia am100% (2)
- Mecavol Chapitre I-VIDocument31 pagesMecavol Chapitre I-VIYassine TouhamiNo ratings yet
- Catalogue de Commandes MATLABDocument8 pagesCatalogue de Commandes MATLABMohamed Ghassen BoudrigaNo ratings yet
- TP Fluent Aile AvionDocument3 pagesTP Fluent Aile Avionhouda elmoudane100% (1)
- Representation D EtatDocument61 pagesRepresentation D EtatSmirnov ArtaéévNo ratings yet
- TP 01 Avec Annexe PDFDocument11 pagesTP 01 Avec Annexe PDFLaila RabhiNo ratings yet
- MethodeWeibull 2Document7 pagesMethodeWeibull 2Nico Ortega MirandaNo ratings yet
- Iset Siliana 2222Document10 pagesIset Siliana 2222MedNo ratings yet
- Aerodynamique Mecanique Corrige PDFDocument16 pagesAerodynamique Mecanique Corrige PDFDamien MirandaNo ratings yet
- Guide D'application Gamme de Relais NP800 PDFDocument99 pagesGuide D'application Gamme de Relais NP800 PDFbxteo100% (1)
- Analyse Modale Dans CATIADocument22 pagesAnalyse Modale Dans CATIAdidierzefNo ratings yet
- Compte Rendu TP1 Marouf Mehdi 2ADocument4 pagesCompte Rendu TP1 Marouf Mehdi 2AMehdi MaroufNo ratings yet
- 4.TP4 - Equilibrage Des MassesDocument12 pages4.TP4 - Equilibrage Des MassesHicham KhalloukiNo ratings yet
- MCC DynamiqueDocument9 pagesMCC DynamiqueLa ReinaNo ratings yet
- Pertes de Charges AérauliquesDocument7 pagesPertes de Charges Aérauliquesenerfire100% (1)
- Cours Gratuit - Com Id 11181 1Document3 pagesCours Gratuit - Com Id 11181 1Merveille DaniellaNo ratings yet
- Rapport PeugeotDocument39 pagesRapport PeugeotHãĐiR chetouiNo ratings yet
- Cours Lubrification VES4Document34 pagesCours Lubrification VES4Büyüleyici GözlerNo ratings yet
- Editsab - TutorialDocument57 pagesEditsab - Tutorialxarly0% (1)
- L3 TP Fluent PDFDocument36 pagesL3 TP Fluent PDFGuediri Aimen100% (1)
- TP Moteur ElectriqueDocument13 pagesTP Moteur ElectriqueFatima FatimaNo ratings yet
- Filtres Passe BasDocument16 pagesFiltres Passe BasABDELNASSERNo ratings yet
- Nouveau Document Microsoft WordDocument22 pagesNouveau Document Microsoft WordHamza HamzaNo ratings yet
- 2-Utilisation de PLCsimDocument5 pages2-Utilisation de PLCsimBELMAMOUNI AyoubNo ratings yet
- TD 05 Corrigé - Comportement Temporel Des SLCI Proportionnel, Dérivateur, Intégrateur Et Du 1er OrdreDocument6 pagesTD 05 Corrigé - Comportement Temporel Des SLCI Proportionnel, Dérivateur, Intégrateur Et Du 1er OrdreMohamed AbaakilNo ratings yet
- 5385 B 108129 DDDocument5 pages5385 B 108129 DDImmamHadramy100% (1)
- TP 6 - Moteur Asynchrone A Cage (Caractéristiques Et Fonctionnement) (1) (Récupéré)Document12 pagesTP 6 - Moteur Asynchrone A Cage (Caractéristiques Et Fonctionnement) (1) (Récupéré)ayanokojiNo ratings yet
- Méthodes: Jacobi Gauss-Seidel Newton-Raphson: UHBC de Chlef ELT M1 ElmDocument1 pageMéthodes: Jacobi Gauss-Seidel Newton-Raphson: UHBC de Chlef ELT M1 Elmأبو كعب علاء الدينNo ratings yet
- TP - Pelton Wheel Turbine - 2022Document6 pagesTP - Pelton Wheel Turbine - 2022Mostafa DridiNo ratings yet
- Expose Sur La Methode de MaxerDocument14 pagesExpose Sur La Methode de MaxerAmadou OuattaraNo ratings yet
- Aop 11Document8 pagesAop 11stefanNo ratings yet
- Examen Elt Ge 2022Document2 pagesExamen Elt Ge 2022hhaddaNo ratings yet
- Systèmes Et Dispositifs Hydrauliques Et PneumatiquesDocument32 pagesSystèmes Et Dispositifs Hydrauliques Et PneumatiquesNidal ChiebNo ratings yet
- Exercices TriphaseDocument8 pagesExercices TriphaseSaad SebNo ratings yet
- Exo HacheursDocument1 pageExo HacheursMamadou SOWNo ratings yet
- Simulation Sur Matlab D'Un Systeme D'Asservissement de Vitesse D'Une Machine A Courant ContinuDocument116 pagesSimulation Sur Matlab D'Un Systeme D'Asservissement de Vitesse D'Une Machine A Courant Continungolo shunguNo ratings yet
- Ad2. O6 - Dimensionner en Effort L'actionneur D'un MécanismeDocument24 pagesAd2. O6 - Dimensionner en Effort L'actionneur D'un MécanismeAbdelali Yacoubi0% (1)
- 9624 TD Formatif Usure Des Pneumatiques Controle Tactile Et Visuel Avec Ident RessDocument9 pages9624 TD Formatif Usure Des Pneumatiques Controle Tactile Et Visuel Avec Ident RessIbra MoulayNo ratings yet
- 9624 TP Formatif Banc de Freinage 2017 CorrigeDocument5 pages9624 TP Formatif Banc de Freinage 2017 CorrigeIbra MoulayNo ratings yet
- 9624 Document Ressource Determination de La Position Cremaillerecentree FinalDocument3 pages9624 Document Ressource Determination de La Position Cremaillerecentree FinalIbra MoulayNo ratings yet
- 9624 tp1 Formatif Banc de Trains Roulant Preparationa La MesureDocument6 pages9624 tp1 Formatif Banc de Trains Roulant Preparationa La MesureIbra MoulayNo ratings yet
- 9624 tp2 Formatif Banc de Trains Roulant Mesure Sur Veuhicule ReuglageDocument4 pages9624 tp2 Formatif Banc de Trains Roulant Mesure Sur Veuhicule ReuglageIbra MoulayNo ratings yet
- 9624 Document Ressource Prepartion Mesure Tav FinalDocument6 pages9624 Document Ressource Prepartion Mesure Tav FinalIbra MoulayNo ratings yet
- 9624 TP Formatif Banc de Freinage 2017 CorrigeDocument5 pages9624 TP Formatif Banc de Freinage 2017 CorrigeIbra MoulayNo ratings yet
- 9878 Recherche de Solutions Et Impression 3dDocument17 pages9878 Recherche de Solutions Et Impression 3dIbra MoulayNo ratings yet
- 9624 tp1 Formatif Banc de Trains Roulant Preparationa La MesureDocument6 pages9624 tp1 Formatif Banc de Trains Roulant Preparationa La MesureIbra MoulayNo ratings yet
- 9878 Recherche de Solutions Et Impression 3dDocument17 pages9878 Recherche de Solutions Et Impression 3dIbra MoulayNo ratings yet
- 9624 Fiche Sequence Ci Maintenance Diagnostic Et Mise Au Point Des Elements de Liaison Au SolDocument6 pages9624 Fiche Sequence Ci Maintenance Diagnostic Et Mise Au Point Des Elements de Liaison Au SolIbra MoulayNo ratings yet
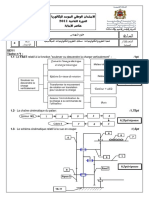
- BAC 2011 SI Normale STM CorrigéDocument8 pagesBAC 2011 SI Normale STM CorrigéIbra Moulay0% (1)
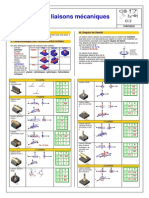
- 3 1 1 Modelisation Liaisons PDFDocument2 pages3 1 1 Modelisation Liaisons PDFMohammed ChaabateNo ratings yet
- Rain UrageDocument2 pagesRain UrageIbra MoulayNo ratings yet
- 6sigma - DéfinitionsDocument9 pages6sigma - DéfinitionsYoussef HraneNo ratings yet
- VMX MécaniqueDocument20 pagesVMX MécaniqueSoulaimaneHassnaouiNo ratings yet
- Ds Tapis de Course SteDocument7 pagesDs Tapis de Course SteIbra Moulay100% (2)
- Transmission de Puissance Par EngrenagesDocument6 pagesTransmission de Puissance Par EngrenagesKhmira WafaNo ratings yet
- 6sigma - D Finition Des Projets PDFDocument4 pages6sigma - D Finition Des Projets PDFIbra MoulayNo ratings yet
- 01 - Fiche Pédagogique N°3Document1 page01 - Fiche Pédagogique N°3Ibra MoulayNo ratings yet
- SpipDocument3 pagesSpipIbra MoulayNo ratings yet
- 3 Integrale de Lesbegue Analyse Cours 12-10-09Document10 pages3 Integrale de Lesbegue Analyse Cours 12-10-09Ibra MoulayNo ratings yet
- Graf CetDocument8 pagesGraf CetDankov2No ratings yet
- Mémoire de Fin D'Études: Département de Génie Civil Et HydrauliqueDocument122 pagesMémoire de Fin D'Études: Département de Génie Civil Et HydrauliqueCabrel FankamNo ratings yet
- Validation PV ELITE 2014Document14 pagesValidation PV ELITE 2014Sebastien SchlesserNo ratings yet
- 04 Composition Des Vitesses Et AccélérationsDocument8 pages04 Composition Des Vitesses Et AccélérationsNitos IncoNo ratings yet
- Écoulement Réactif en Milieu Poreux PDFDocument229 pagesÉcoulement Réactif en Milieu Poreux PDFait hssainNo ratings yet
- Despre Suflare F BunDocument56 pagesDespre Suflare F BunChivuAlexandruNo ratings yet
- 2 m1 Me s2 Pcsc2 Structure MisDocument33 pages2 m1 Me s2 Pcsc2 Structure Misrano bousselaouiNo ratings yet
- Chapitre 1 Les Tableaux Et Les EnregistrementsDocument18 pagesChapitre 1 Les Tableaux Et Les EnregistrementsLinux CrafterNo ratings yet
- Sujet U32Document20 pagesSujet U32Triki BilelNo ratings yet
- TP Lignes D'InfluencesDocument9 pagesTP Lignes D'Influenceslando de chanceNo ratings yet
- PfesaidrachibiDocument99 pagesPfesaidrachibiSCORP LIONo ratings yet
- Guide BBC EffilogisDocument11 pagesGuide BBC EffilogisFranche-Comté100% (2)
- Comportement Générique Des OndesDocument3 pagesComportement Générique Des Ondesla physique selon le programme FrançaisNo ratings yet
- (PDF) Exercices - Topologie Des Espaces Vectoriels Normés - Corrigé - Othmane Rais - AcademiaDocument9 pages(PDF) Exercices - Topologie Des Espaces Vectoriels Normés - Corrigé - Othmane Rais - AcademiaNambinintsoa NomenjanaharyNo ratings yet
- ApplicationsDocument14 pagesApplicationsAyoub HmimssaNo ratings yet
- Statistique 3APICDocument2 pagesStatistique 3APICMohamed AylalNo ratings yet
- Serie D'exercices Corrigés - Math - Suites Réelles 1 - 4ème Math (2009-2010)Document4 pagesSerie D'exercices Corrigés - Math - Suites Réelles 1 - 4ème Math (2009-2010)GastØn El GassNo ratings yet
- Convertisseur BoostDocument9 pagesConvertisseur BoostNaas DjeddaouiNo ratings yet
- Transformation Ponctuelle Histogram MeDocument42 pagesTransformation Ponctuelle Histogram MeVhdl FpgaNo ratings yet
- ProbatdDocument33 pagesProbatdensimagNo ratings yet
- Daniel Alibert - Cours Et Exercices Corrigés - Volume 4Document140 pagesDaniel Alibert - Cours Et Exercices Corrigés - Volume 4walantaNo ratings yet
- ELG2736 Chapitre 1 VariablesDocument184 pagesELG2736 Chapitre 1 VariablesGedeon KayaNo ratings yet
- Comparaison Des Normes Euro Code 8Document23 pagesComparaison Des Normes Euro Code 8Kara Mella50% (2)
- Corrige Exos StatsDocument4 pagesCorrige Exos StatsOliver TwisteNo ratings yet