You might also like
- Arduino Code for Line Following RobotDocument3 pagesArduino Code for Line Following RobotantoinnevongenesisNo ratings yet
- Arduino Control Car V2Document4 pagesArduino Control Car V2Mikaela E Ramírez HerreraNo ratings yet
- ObjectivesDocument3 pagesObjectivesMara TañgonanNo ratings yet
- Line Follower Robot Control CodeDocument13 pagesLine Follower Robot Control CodeAzam KhanNo ratings yet
- Code UDocument4 pagesCode Ukaloy33No ratings yet
- Document (6)Document4 pagesDocument (6)omri29949No ratings yet
- Arduino PracticasDocument10 pagesArduino PracticasFrancisco David IcazaNo ratings yet
- Programming With ArduinoDocument74 pagesProgramming With ArduinoGURSIMRAN SINGHNo ratings yet
- Project 1 Arduino Smart CarDocument9 pagesProject 1 Arduino Smart CarKnews SkopjeNo ratings yet
- Arduino Programming BasicsDocument74 pagesArduino Programming BasicsAstha AggarwalNo ratings yet
- Driver Motor - InoDocument3 pagesDriver Motor - InoJohn Bryan LanguidoNo ratings yet
- PruebaDocument2 pagesPruebaAngelique Jimenez CarbajalNo ratings yet
- Csed LabDocument83 pagesCsed LabÈshâñ ÇháddâNo ratings yet
- Programacion para Robot ZumoDocument3 pagesProgramacion para Robot Zumoandres angel salinasNo ratings yet
- Laporan HS2 02 - OUTPUT Bag2Document5 pagesLaporan HS2 02 - OUTPUT Bag2Gyan Popong EkasatriaNo ratings yet
- ECEN85 - Conveyor Belt With Pick and Place Arm - GROUP4Document10 pagesECEN85 - Conveyor Belt With Pick and Place Arm - GROUP4Cenon Lumabad IIINo ratings yet
- HKBK COLLEGE OF ENGINEERING SYLLABUS IOT TECHNOLOGYDocument78 pagesHKBK COLLEGE OF ENGINEERING SYLLABUS IOT TECHNOLOGYSavanNo ratings yet
- Fa20 BCS 026,049,054,060Document3 pagesFa20 BCS 026,049,054,060malkNo ratings yet
- Automatic Fire Fighting Robot - InoDocument4 pagesAutomatic Fire Fighting Robot - InoMuhammad UsamaNo ratings yet
- Arduion Experiment WorkDocument21 pagesArduion Experiment Workmohamed ramadanNo ratings yet
- How to Program an Arduino: Digital Inputs, Outputs, and If StatementsDocument9 pagesHow to Program an Arduino: Digital Inputs, Outputs, and If Statements'Andres TorregrosaNo ratings yet
- Interfacing A VOR/LOC/Glideslope Indicator byDocument17 pagesInterfacing A VOR/LOC/Glideslope Indicator byeumesmo222No ratings yet
- Bluetooth and Ultrasonic Sensor ProjectsDocument29 pagesBluetooth and Ultrasonic Sensor Projectshervina kirunaNo ratings yet
- Arduion Experiment WorkDocument21 pagesArduion Experiment Workmohamed ramadanNo ratings yet
- Arduino ExampleDocument25 pagesArduino ExampleUYeMin HtikeNo ratings yet
- Reglarea Vitezei La MCCDocument10 pagesReglarea Vitezei La MCCGaby AxlNo ratings yet
- Module 5Document65 pagesModule 5Shilpa ShridharNo ratings yet
- WiFi Robot Remo-WPS OfficeDocument11 pagesWiFi Robot Remo-WPS OfficeJohn Bryan LanguidoNo ratings yet
- PROGRAMA AUDUINO Auto Con GruaDocument4 pagesPROGRAMA AUDUINO Auto Con GruaMarcelo VargasNo ratings yet
- IOT AssignmentDocument8 pagesIOT Assignment09Samrat Bikram ShahNo ratings yet
- Obstacle W Line TraceDocument3 pagesObstacle W Line TraceBern SalvadorNo ratings yet
- The Good OneDocument5 pagesThe Good Oneapi-379298286No ratings yet
- l9110 2 Channel Motor DriverDocument5 pagesl9110 2 Channel Motor DriverOlmer GarciaNo ratings yet
- Variable PWM DC Motor Control Using Potentiometer and Toggle SwitchesDocument2 pagesVariable PWM DC Motor Control Using Potentiometer and Toggle SwitchessriramNo ratings yet
- ARDUINO Tinkercad Practices - NoDocument116 pagesARDUINO Tinkercad Practices - NoDavidNo ratings yet
- Códigos Prácticas ARDUINODocument5 pagesCódigos Prácticas ARDUINODaríoRodríguezBarriadaNo ratings yet
- Line Follower and Obstacle Avoiding Robot - InoDocument4 pagesLine Follower and Obstacle Avoiding Robot - Inoakuladamodhar20No ratings yet
- Arduino ExamplesDocument16 pagesArduino ExamplesKapila WijayaratneNo ratings yet
- Arduino - DigitalWriteDocument3 pagesArduino - DigitalWritebabaNo ratings yet
- All CodesDocument28 pagesAll CodeskarrarNo ratings yet
- Module 5Document73 pagesModule 5JyothsnaNo ratings yet
- Final CodeDocument4 pagesFinal Codeprivate demonNo ratings yet
- Iot1 5Document5 pagesIot1 5btmsNo ratings yet
- Mikrokontroller ArduinorariefDocument101 pagesMikrokontroller ArduinorariefDio Izqhaq Risky SasongkoNo ratings yet
- Arduino Code for Motion Detection and AlertDocument8 pagesArduino Code for Motion Detection and AlertbtmsNo ratings yet
- Drone Control SoftwareDocument13 pagesDrone Control SoftwareAnonymous 3yqNzCxtTzNo ratings yet
- ProjectcodeDocument3 pagesProjectcodeRahul YadavNo ratings yet
- Motor CC Cu Driver 1Document4 pagesMotor CC Cu Driver 1viviNo ratings yet
- Arduino ProjectDocument13 pagesArduino ProjectIvy BacolonganNo ratings yet
- You Can Find Circuit Diagram and Source Code On AppDocument9 pagesYou Can Find Circuit Diagram and Source Code On AppMinh TrầnNo ratings yet
- Arduino Uno Microcontroller Guide for IoT BeginnersDocument73 pagesArduino Uno Microcontroller Guide for IoT BeginnersGr RanjereNo ratings yet
- ATAL Tinkering Lab PracticalDocument6 pagesATAL Tinkering Lab PracticalTECH HYAKUNo ratings yet
- TP 13Document3 pagesTP 13Gianluca BaizaNo ratings yet
- New Text DocumentDocument2 pagesNew Text DocumentMahmoud ElmohamdyNo ratings yet
- The Ultrasonic SensorDocument14 pagesThe Ultrasonic SensorAdalberto Sharpley100% (1)
- 006 - Arduino (Simulation-1)Document18 pages006 - Arduino (Simulation-1)ImranNo ratings yet
- ModulfinalDocument2 pagesModulfinalYopi HanjoyoNo ratings yet
- Exploring BeagleBone: Tools and Techniques for Building with Embedded LinuxFrom EverandExploring BeagleBone: Tools and Techniques for Building with Embedded LinuxRating: 4 out of 5 stars4/5 (2)
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Routerboard 500: Quick Setup Guide and Warranty InformationDocument2 pagesRouterboard 500: Quick Setup Guide and Warranty InformationnormalmannNo ratings yet
- Nissan Connect Digital Audio PDI ReprogramDocument9 pagesNissan Connect Digital Audio PDI ReprogramCristian DobreNo ratings yet
- Recent Advances and Trends For Digital Coherent 100Gb/s and Beyond Technologies in Submarine Optical CableDocument25 pagesRecent Advances and Trends For Digital Coherent 100Gb/s and Beyond Technologies in Submarine Optical CableAmanuel TadeleNo ratings yet
- Organizational Study Report at Axalta CoatingDocument54 pagesOrganizational Study Report at Axalta CoatingJagdish SharmaNo ratings yet
- Power Semiconductor DevicesDocument3 pagesPower Semiconductor DevicesSoumitra KunduNo ratings yet
- General Knowledge For PPSC, FPSC, SPSC, KPPSC, NTS, Ots, Pts Tests-Part2Document25 pagesGeneral Knowledge For PPSC, FPSC, SPSC, KPPSC, NTS, Ots, Pts Tests-Part2Muhammad SiddiqueNo ratings yet
- 4&7 Cable Method With The ES8 (4CM-7CM)Document4 pages4&7 Cable Method With The ES8 (4CM-7CM)Will RamosNo ratings yet
- DTEx Marine Series A4 BrochureDocument4 pagesDTEx Marine Series A4 BrochureZafar YabNo ratings yet
- PRISMA MFN11 Trasp.70 ENG Rev.002 LQDocument2 pagesPRISMA MFN11 Trasp.70 ENG Rev.002 LQMohamed ElfekyNo ratings yet
- ADU4518R6v01 PDFDocument2 pagesADU4518R6v01 PDFDavid NigraNo ratings yet
- Presentation On SDH Vs SS7Document59 pagesPresentation On SDH Vs SS7lvsaruNo ratings yet
- Micoprocesador LG VCT49XYI PDFDocument374 pagesMicoprocesador LG VCT49XYI PDFGilbertoAdonayGutierrezNo ratings yet
- Fiber PrinciplesDocument38 pagesFiber PrinciplesJanett VillanuevaNo ratings yet
- PHD Thesis Completed As at 15 Sept 2009Document25 pagesPHD Thesis Completed As at 15 Sept 2009lathamercyNo ratings yet
- Sts XXXX TD 5000 User ManualDocument830 pagesSts XXXX TD 5000 User ManualMuhammad NajibNo ratings yet
- Multi-Core Programming - Increasing Performance Through Software Multi-ThreadingDocument11 pagesMulti-Core Programming - Increasing Performance Through Software Multi-ThreadingKarthikNo ratings yet
- St2712w LaboratoriumDocument86 pagesSt2712w LaboratoriumAnkit DesaiNo ratings yet
- A Proportional Control System Is A Type of Linear Feedback Control SystemDocument11 pagesA Proportional Control System Is A Type of Linear Feedback Control SystemAutomation WorldpkNo ratings yet
- BF970Document5 pagesBF970vali2daduicaNo ratings yet
- SmartX Controlle AS P Technical Leaflet 03 17031 06 en November 2015 PDFDocument6 pagesSmartX Controlle AS P Technical Leaflet 03 17031 06 en November 2015 PDFEdwin Zapata CardonaNo ratings yet
- 5G Mobile and Wireless Communications Technology: June 2016Document31 pages5G Mobile and Wireless Communications Technology: June 2016HarikrishnaChinthalaboyinaNo ratings yet
- Automatic Test EquipmentDocument6 pagesAutomatic Test EquipmentMihaela DanilescuNo ratings yet
- B.Tech E&I Engineering Scheme of Study & SyllabusDocument58 pagesB.Tech E&I Engineering Scheme of Study & SyllabusMuthu KumarNo ratings yet
- SlimDAS Data Sheet NGISDocument4 pagesSlimDAS Data Sheet NGISbarthel996No ratings yet
- OmniVision ProductGuideDocument0 pagesOmniVision ProductGuideLê Văn LợiNo ratings yet
- 82-01.54.000639-1.0 SD3 Series Ultrasonic Pocket Doppler Service Manual-ES - 0Document32 pages82-01.54.000639-1.0 SD3 Series Ultrasonic Pocket Doppler Service Manual-ES - 0edisonalvarado1994No ratings yet
- Moore vs Mealy MachinesDocument81 pagesMoore vs Mealy MachinesPrema ChandNo ratings yet
- 05 FO - NP2103 - E02 - 1 LTE Site Survey - P25Document25 pages05 FO - NP2103 - E02 - 1 LTE Site Survey - P25AGUS WALIYUDINNo ratings yet
- NetatmoDocument48 pagesNetatmoJuli SánchezNo ratings yet
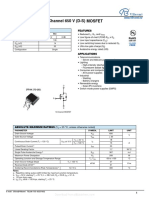
- N-Channel 0 V (D-S) Mosfet: Features Product SummaryDocument8 pagesN-Channel 0 V (D-S) Mosfet: Features Product SummarySajjad HussainNo ratings yet