You might also like
- Experimental Response of Boundary Elements of Code-Compliant Reinforced Concrete Shear WallsDocument11 pagesExperimental Response of Boundary Elements of Code-Compliant Reinforced Concrete Shear WallsArabella ZapataNo ratings yet
- Foundation Load-Characteristic Effects On Dynamic Structural DeformationDocument11 pagesFoundation Load-Characteristic Effects On Dynamic Structural Deformationapi-19591368No ratings yet
- ANALYSIS AND DESIGN OF STEEL PLATE SHEAR Wall Using Etabs PDFDocument8 pagesANALYSIS AND DESIGN OF STEEL PLATE SHEAR Wall Using Etabs PDFabdulghafrNo ratings yet
- Sixth International Congress On Sound and Vibration: 5-8 July 1999, Copenhagen, DenmarkDocument6 pagesSixth International Congress On Sound and Vibration: 5-8 July 1999, Copenhagen, DenmarkAfter DarkNo ratings yet
- SID-Project Phase 1 - Spring 2015Document5 pagesSID-Project Phase 1 - Spring 2015fernando CanizaresNo ratings yet
- TL149 PDFDocument10 pagesTL149 PDFSabyasachi Naik (Zico)No ratings yet
- 0250 PDFDocument8 pages0250 PDFGREATANo ratings yet
- Seismic Isolation For Soft-Story Buildings: Seval Pinarbasi, Dimitrios Konstantinidis, James M. KellyDocument12 pagesSeismic Isolation For Soft-Story Buildings: Seval Pinarbasi, Dimitrios Konstantinidis, James M. KellyciscoNo ratings yet
- Term Exam 2 - QuestionsDocument4 pagesTerm Exam 2 - Questionsamadeus135No ratings yet
- Inelastic Seismic Response of Reinforced Concrete Buildings With Symmetric and Unsymmetric Floor Diaphragm OpeningsDocument8 pagesInelastic Seismic Response of Reinforced Concrete Buildings With Symmetric and Unsymmetric Floor Diaphragm Openingsप्रतीक राज पण्डितNo ratings yet
- Pushover Analysis On Multistory BuildingDocument14 pagesPushover Analysis On Multistory BuildingayuvinaNo ratings yet
- Designing Concrete Structures:: Reinforced Rectangular Concrete Column Interaction Diagram ExampleDocument16 pagesDesigning Concrete Structures:: Reinforced Rectangular Concrete Column Interaction Diagram ExampleDiego Alberto Espitia RojasNo ratings yet
- Three-Dimensional Finite Element Analysis For Concrete Arch Dam of Tianshengqiao ReservoirDocument4 pagesThree-Dimensional Finite Element Analysis For Concrete Arch Dam of Tianshengqiao ReservoirMathy TuringNo ratings yet
- Portal FrameDocument15 pagesPortal FramenicholasNo ratings yet
- Assignment 3 PDFDocument11 pagesAssignment 3 PDFReffisa JiruNo ratings yet
- Substation Grounding Grid Design Using ADocument23 pagesSubstation Grounding Grid Design Using ADavid LondoñoNo ratings yet
- General Notes On Modeling Using SAP - ECG - v1Document39 pagesGeneral Notes On Modeling Using SAP - ECG - v1Sudip ShresthaNo ratings yet
- Practical Advanced Analysis ForDocument16 pagesPractical Advanced Analysis ForAndre YPNo ratings yet
- Gullapalli2020 Chapter EffectOfSoilStructureInteractiDocument10 pagesGullapalli2020 Chapter EffectOfSoilStructureInteractiManikanta SharmaNo ratings yet
- Example 7.5Document4 pagesExample 7.5Richardson Chavez TaypeNo ratings yet
- Practical Modeling For Nonlinear Seismic Response of RC Wall StructuresDocument10 pagesPractical Modeling For Nonlinear Seismic Response of RC Wall StructuresXTREME P-D100% (1)
- Building G+6Document46 pagesBuilding G+6ammarsteel68No ratings yet
- Reinforced Concrete Building, Modelling, Analysis and Design by Staad-Pro (Example 3) by Prof. Dr. Nabeel Al-BayatiDocument5 pagesReinforced Concrete Building, Modelling, Analysis and Design by Staad-Pro (Example 3) by Prof. Dr. Nabeel Al-BayatiProfessor Dr. Nabeel Al-Bayati-Consultant Engineer50% (2)
- Presentation Effect of Tie Rods in Historical Construction Final 2Document21 pagesPresentation Effect of Tie Rods in Historical Construction Final 2emrececenNo ratings yet
- Implication of The Seismic Code On The Seismic Design of Bridges in AlgeriaDocument8 pagesImplication of The Seismic Code On The Seismic Design of Bridges in Algeriagorgika papandNo ratings yet
- Multi-Story Tilt-Up Wall Panel Analysis and Design ACI-551Document26 pagesMulti-Story Tilt-Up Wall Panel Analysis and Design ACI-551Rosa LeónNo ratings yet
- V MahendraDocument11 pagesV MahendrapratapNo ratings yet
- 2005 Dynamic Characterization of The New Braga Stadium Large Span Suspension Roof1Document8 pages2005 Dynamic Characterization of The New Braga Stadium Large Span Suspension Roof1TC LUXNo ratings yet
- Study On Thickness of Two-Way Slab by Artificial Neural NetworkDocument7 pagesStudy On Thickness of Two-Way Slab by Artificial Neural NetworkjasimabdNo ratings yet
- Design Procedures For Profiled Metal Sheeting and DeckingDocument11 pagesDesign Procedures For Profiled Metal Sheeting and DeckingPrapa KaranNo ratings yet
- 3rd ICEEDM-47Document9 pages3rd ICEEDM-47rbudimanNo ratings yet
- Diseño de Muros EspecialesDocument11 pagesDiseño de Muros EspecialesRonald Omar García RojasNo ratings yet
- Structure Dynamic HW SolutionDocument60 pagesStructure Dynamic HW Solution박종국No ratings yet
- Direct-Coupled Concentric Half-Loop Antenna - A Low Cost Option For High Speed Point-to-Point UWB LinksDocument3 pagesDirect-Coupled Concentric Half-Loop Antenna - A Low Cost Option For High Speed Point-to-Point UWB LinksViJaY HaLdErNo ratings yet
- 14 - 12 03 0104 PDFDocument8 pages14 - 12 03 0104 PDFKashif AlamNo ratings yet
- 011 Kohler Accelarated Load TestsDocument15 pages011 Kohler Accelarated Load TestsRob DamhuisNo ratings yet
- Reinforced Concrete Building, Modelling, Analysis and Design by Staad-Pro (Example 3)Document6 pagesReinforced Concrete Building, Modelling, Analysis and Design by Staad-Pro (Example 3)Shahid BhatNo ratings yet
- Civil Deisgn Report 620118389Document27 pagesCivil Deisgn Report 620118389Tajay BillingsNo ratings yet
- Design and Dynamic Response Analysis of Rail With Constrained Damped Dynamic Vibration AbsorberDocument5 pagesDesign and Dynamic Response Analysis of Rail With Constrained Damped Dynamic Vibration AbsorberusmanNo ratings yet
- Encosure Amp Pier 2011Document16 pagesEncosure Amp Pier 2011Anonymous ZTD4CNkSkNNo ratings yet
- 1.0 Design Criterea 1 1 Assumptions 1.1 Assumptions: 8M Clear Span Solid Slab Bridge DesignDocument10 pages1.0 Design Criterea 1 1 Assumptions 1.1 Assumptions: 8M Clear Span Solid Slab Bridge DesignAddisu Gizaw Addis Ye AbereyeNo ratings yet
- Chapter03 - Part2Document96 pagesChapter03 - Part2Isprotec IngenieriaNo ratings yet
- Seismic Analysis & Design of 10 Story RC Building: Using ETABSDocument52 pagesSeismic Analysis & Design of 10 Story RC Building: Using ETABSMohammed FarhanNo ratings yet
- ETABS-Example-RC Building Seismic Load - ResponseDocument52 pagesETABS-Example-RC Building Seismic Load - ResponseTriet TruongNo ratings yet
- Dr. Kyung-Tae Bae - A Case Study of Settlement Behavior of Dynamic Compacted High Rock Embankment With Construction Path-2-2 PDFDocument4 pagesDr. Kyung-Tae Bae - A Case Study of Settlement Behavior of Dynamic Compacted High Rock Embankment With Construction Path-2-2 PDFthanhtrung87No ratings yet
- Design Response Spectra For A Rock Site in The City of SkopjeDocument12 pagesDesign Response Spectra For A Rock Site in The City of SkopjeTaulantKarriqiNo ratings yet
- 1.105 Solid Mechanics Laboratory Fall 2003: Experiment 4 The Linear, Elastic Behavior of A TrussDocument24 pages1.105 Solid Mechanics Laboratory Fall 2003: Experiment 4 The Linear, Elastic Behavior of A Trussprieten20006936No ratings yet
- PPTDocument15 pagesPPThngfhgfNo ratings yet
- Collaborative Research and Development Project For Disaster Mitigation in Earthquake Prone Areas in AsiaDocument33 pagesCollaborative Research and Development Project For Disaster Mitigation in Earthquake Prone Areas in AsiadawitgggNo ratings yet
- Ucsd/nees/pca Blind Prediction Contest: Entry From National University of Mexico, MexicoDocument10 pagesUcsd/nees/pca Blind Prediction Contest: Entry From National University of Mexico, MexicoMiguel TorresNo ratings yet
- Lecture 2-Frame AnalysisDocument125 pagesLecture 2-Frame AnalysisRuben OoiNo ratings yet
- Statics and Dinamics NotesDocument126 pagesStatics and Dinamics NotesJosé Natal100% (1)
- Seismic Analysis of Electronic Cabinet Using ANSYSDocument8 pagesSeismic Analysis of Electronic Cabinet Using ANSYSkrisbhaskarNo ratings yet
- Lecture 2 Frame Analysis 031016 PDFDocument125 pagesLecture 2 Frame Analysis 031016 PDFAbdulrahman AlnagarNo ratings yet
- RigidDiaphragms 230616 145059Document10 pagesRigidDiaphragms 230616 145059Phol Velez QquenayaNo ratings yet
- Methods of Analysis For Earthquake Resistant Structures: IS - 1893 (Part-1) - 2002Document36 pagesMethods of Analysis For Earthquake Resistant Structures: IS - 1893 (Part-1) - 2002NARENDRA PATELNo ratings yet
- Methods of Analysis For Earthquake Resistant Structures: IS - 1893 (Part-1) - 2002Document36 pagesMethods of Analysis For Earthquake Resistant Structures: IS - 1893 (Part-1) - 2002kuldeep mohiteNo ratings yet
- 2002 - Sakai and Kawashima - 12ECEE2002 - 252Document10 pages2002 - Sakai and Kawashima - 12ECEE2002 - 252fsimaNo ratings yet
- Csa2007 Ej Se01Document17 pagesCsa2007 Ej Se01Amith KeshvtakarNo ratings yet
- Mto Curvatura ManderDocument17 pagesMto Curvatura ManderSergio Echeverría RNo ratings yet
- Atc 40Document346 pagesAtc 40AZ31486% (7)
- Dissertation2004 Blandon PDFDocument68 pagesDissertation2004 Blandon PDFJeanette MillerNo ratings yet
- Beca Angel San Bartolome AnexosDocument2 pagesBeca Angel San Bartolome AnexosJack Mayhua HuamanNo ratings yet
- Mathcad 19 DeflectionDocument10 pagesMathcad 19 DeflectionJack Mayhua HuamanNo ratings yet
- Direct Displacement Based Design With Inelastic Spectra - Pap - EeriDocument18 pagesDirect Displacement Based Design With Inelastic Spectra - Pap - EeriLobsang MatosNo ratings yet
- King Arthur Legends: Introductions To The Man, The Legend, The HeroDocument18 pagesKing Arthur Legends: Introductions To The Man, The Legend, The HeroJack Mayhua HuamanNo ratings yet
- 007 StonehengethemysteryofenglandDocument7 pages007 StonehengethemysteryofenglandJack Mayhua HuamanNo ratings yet
- Paula Lamego Supervisors: Paulo Lourenço Luísa Sousa: Seismic Vulnerability Analysis by The Spectrum Capacity MethodDocument1 pagePaula Lamego Supervisors: Paulo Lourenço Luísa Sousa: Seismic Vulnerability Analysis by The Spectrum Capacity MethodJack Mayhua HuamanNo ratings yet
- King Arthur Legends: Introductions To The Man, The Legend, The HeroDocument18 pagesKing Arthur Legends: Introductions To The Man, The Legend, The HeroJack Mayhua HuamanNo ratings yet
- Diagram AsDocument69 pagesDiagram AsJack Mayhua HuamanNo ratings yet
- Mom Curv and Matl PropsDocument8 pagesMom Curv and Matl PropsJack Mayhua HuamanNo ratings yet
- Bermuda Triangle Konstantinova E 8aDocument8 pagesBermuda Triangle Konstantinova E 8aJack Mayhua HuamanNo ratings yet
- How To Register Web LicenseDocument1 pageHow To Register Web LicenseGustavo BarbosaNo ratings yet
- Kmaples 2005 PropDocument2 pagesKmaples 2005 PropJack Mayhua HuamanNo ratings yet
- Bermuda Triangle Konstantinova E 8aDocument8 pagesBermuda Triangle Konstantinova E 8aJack Mayhua HuamanNo ratings yet
- BermudaTriangleppt2Document11 pagesBermudaTriangleppt2Jack Mayhua HuamanNo ratings yet
- Mystery of The Bermuda TriangleDocument6 pagesMystery of The Bermuda TriangleJack Mayhua HuamanNo ratings yet
- The Bermuda Triangle: Reasoning of The Unknown: David DeeseDocument13 pagesThe Bermuda Triangle: Reasoning of The Unknown: David DeeseJack Mayhua HuamanNo ratings yet
- Bermuda Triangle PresentationDocument23 pagesBermuda Triangle PresentationJack Mayhua HuamanNo ratings yet
- Simulation of A Spring Mass Damper System Using MatlabDocument54 pagesSimulation of A Spring Mass Damper System Using Matlabshika-san65% (17)
- Ansys 15.07 (64-Bits)Document1 pageAnsys 15.07 (64-Bits)Jack Mayhua HuamanNo ratings yet
- Mass Spring MatlabDocument9 pagesMass Spring Matlabjobkazi9725No ratings yet
- 3d Pushover AnalysisDocument10 pages3d Pushover AnalysisBeenah Sheila KhushiramNo ratings yet
- Chapter 7 - Weirs: Q Discharge Over Weir in FT C H HDocument3 pagesChapter 7 - Weirs: Q Discharge Over Weir in FT C H HJack Mayhua HuamanNo ratings yet
- $QHMR& (Vixhu) RVGH Hpsrwudplhqwrshuihfwr: Viga Empotrada en Ambos ExtremosDocument3 pages$QHMR& (Vixhu) RVGH Hpsrwudplhqwrshuihfwr: Viga Empotrada en Ambos ExtremosJack Mayhua HuamanNo ratings yet
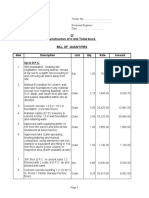
- Type BOQ For Construction of 4 Units Toilet Drawing No.04Document6 pagesType BOQ For Construction of 4 Units Toilet Drawing No.04Yashika Bhathiya JayasingheNo ratings yet
- Common Base AmplifierDocument6 pagesCommon Base AmplifierMuhammad SohailNo ratings yet
- Salva v. MakalintalDocument2 pagesSalva v. MakalintalGain DeeNo ratings yet
- It14 Belotti PDFDocument37 pagesIt14 Belotti PDFHolis AdeNo ratings yet
- Business Plan GROUP 10Document35 pagesBusiness Plan GROUP 10Sofia GarciaNo ratings yet
- U2 - Week1 PDFDocument7 pagesU2 - Week1 PDFJUANITO MARINONo ratings yet
- Sec2 8 PDFDocument3 pagesSec2 8 PDFpolistaNo ratings yet
- Effective Communication LeaderDocument4 pagesEffective Communication LeaderAnggun PraditaNo ratings yet
- Solved - in Capital Budgeting, Should The Following Be Ignored, ...Document3 pagesSolved - in Capital Budgeting, Should The Following Be Ignored, ...rifa hanaNo ratings yet
- Rundown Rakernas & Seminar PABMI - Final-1Document6 pagesRundown Rakernas & Seminar PABMI - Final-1MarthinNo ratings yet
- The Website Design Partnership FranchiseDocument5 pagesThe Website Design Partnership FranchiseCheryl MountainclearNo ratings yet
- Options Trading For Beginners Aug15 v1Document187 pagesOptions Trading For Beginners Aug15 v1Glo BerriNo ratings yet
- Pyro ShieldDocument6 pagesPyro Shieldmunim87No ratings yet
- M70-700 4th or 5th Axis Install ProcedureDocument5 pagesM70-700 4th or 5th Axis Install ProcedureNickNo ratings yet
- RODECaster Pro II - DataSheet - V01 - 4Document1 pageRODECaster Pro II - DataSheet - V01 - 4lazlosNo ratings yet
- Pharaoh TextDocument143 pagesPharaoh Textanon_31362848No ratings yet
- 7373 16038 1 PBDocument11 pages7373 16038 1 PBkedairekarl UNHASNo ratings yet
- Effect of Internet Use To Academic PerformaceDocument4 pagesEffect of Internet Use To Academic PerformaceLeonard R. RodrigoNo ratings yet
- Two 2 Page Quality ManualDocument2 pagesTwo 2 Page Quality Manualtony sNo ratings yet
- Computerized AccountingDocument14 pagesComputerized Accountinglayyah2013No ratings yet
- Labor Law 1Document24 pagesLabor Law 1Naomi Cartagena100% (1)
- Ks 1609Document5 pagesKs 1609krish dabhiNo ratings yet
- Prepositions Below by in On To of Above at Between From/toDocument2 pagesPrepositions Below by in On To of Above at Between From/toVille VianNo ratings yet
- Chapter 1.4Document11 pagesChapter 1.4Gie AndalNo ratings yet
- Carelink Connect: User GuideDocument41 pagesCarelink Connect: User GuideMiha SoicaNo ratings yet
- Ss1169 - Telecom Frameworx l1TMFDocument65 pagesSs1169 - Telecom Frameworx l1TMFPrince SinghNo ratings yet
- ARISE 2023: Bharati Vidyapeeth College of Engineering, Navi MumbaiDocument5 pagesARISE 2023: Bharati Vidyapeeth College of Engineering, Navi MumbaiGAURAV DANGARNo ratings yet
- To The Owner / President / CeoDocument2 pagesTo The Owner / President / CeoChriestal SorianoNo ratings yet
- 01 Eh307 Crimpro Case Digests Part 1Document214 pages01 Eh307 Crimpro Case Digests Part 1Kimberly PerezNo ratings yet
- Carry Trade Calculator 1.54Document3 pagesCarry Trade Calculator 1.54Gabriel RomanNo ratings yet