You might also like
- Automated Measurement of Frequency Response of Electrical Networks Filters and AmplifiersDocument7 pagesAutomated Measurement of Frequency Response of Electrical Networks Filters and AmplifiersDiscrete ComponentNo ratings yet
- 2013 2014 Report1Document64 pages2013 2014 Report1Christian Gonzalez ArandaNo ratings yet
- DSTATCOM ControlDocument5 pagesDSTATCOM ControlabsalnabiNo ratings yet
- Lab 5 - Controls and Feedback: BackgroundDocument6 pagesLab 5 - Controls and Feedback: BackgroundABamisheNo ratings yet
- Digital Control Design Framework for Dynamic Systems Modeling and SimulationDocument6 pagesDigital Control Design Framework for Dynamic Systems Modeling and Simulationsattanic666No ratings yet
- DSP Based Excitation Control System For Synchronous GeneratorDocument5 pagesDSP Based Excitation Control System For Synchronous GeneratorPradeep_VashistNo ratings yet
- HIL Interface USCDocument7 pagesHIL Interface USCSripada ParamahamsaNo ratings yet
- ELEC4632 Lab 4: Real-Time Implementation of Output Feedback Control System For Set-Point ControlDocument4 pagesELEC4632 Lab 4: Real-Time Implementation of Output Feedback Control System For Set-Point ControlZIYI PANNo ratings yet
- Train Test NaunDocument8 pagesTrain Test NaunfvijayamiNo ratings yet
- Implementation and Test Results of A Wide-Area Measurement-Based Controller For Damping Interarea Oscillations Considering Signal-Transmission DelayDocument8 pagesImplementation and Test Results of A Wide-Area Measurement-Based Controller For Damping Interarea Oscillations Considering Signal-Transmission Delaya_almutairiNo ratings yet
- 2 Canada-Us Cansmart Workshop: 10 - 11 October 2002, Montreal, Quebec, CanadaDocument7 pages2 Canada-Us Cansmart Workshop: 10 - 11 October 2002, Montreal, Quebec, CanadaBhuvaneshwar PatilNo ratings yet
- BS Lab Manual R18 PDFDocument113 pagesBS Lab Manual R18 PDFKamarthi VanithaNo ratings yet
- Xilinx Implementation of Pulse Width Modulation Generation Using FpgaDocument5 pagesXilinx Implementation of Pulse Width Modulation Generation Using FpgawigaYeHtetNo ratings yet
- Weekly PP PDFDocument11 pagesWeekly PP PDFDanielHaileNo ratings yet
- Digital Control Systems Lecture Notes: Introduction and Signal ProcessingDocument61 pagesDigital Control Systems Lecture Notes: Introduction and Signal ProcessingHari Pavan0391No ratings yet
- Irjet V3i6175Document4 pagesIrjet V3i6175Alemu EshetuNo ratings yet
- Problem SolutionsDocument6 pagesProblem SolutionsMuhammad Talha AtharNo ratings yet
- Lab 3Document11 pagesLab 3Vulpe FlorianNo ratings yet
- Chapter 2 Discrete Data Control SystemsDocument78 pagesChapter 2 Discrete Data Control SystemsAmruth ThelkarNo ratings yet
- A Digital-Based Optimal AVR Design of Synchronous Generator Exciter Using LQR TechniqueDocument13 pagesA Digital-Based Optimal AVR Design of Synchronous Generator Exciter Using LQR Technique3KaiserENo ratings yet
- Digital Control of a Single-Phase PWM Inverter Using GPCDocument3 pagesDigital Control of a Single-Phase PWM Inverter Using GPCsa920189No ratings yet
- SENSOR FAULT TOLERANT CONTROL DESIGN APPLIED TO A WI - 2007 - IFAC Proceedings VDocument8 pagesSENSOR FAULT TOLERANT CONTROL DESIGN APPLIED TO A WI - 2007 - IFAC Proceedings VsmeykelNo ratings yet
- RTDS - A Fully Digital Power System Simulator PDFDocument6 pagesRTDS - A Fully Digital Power System Simulator PDFLeonardo MarquesNo ratings yet
- Research Inventy: International Journal of Engineering and ScienceDocument5 pagesResearch Inventy: International Journal of Engineering and ScienceresearchinventyNo ratings yet
- Shri Ramdeobaba College of Engineering and Management, NagpurDocument6 pagesShri Ramdeobaba College of Engineering and Management, Nagpursiddhi rathiNo ratings yet
- Event Driven Analog Modeling For The Verification of PLL Frequency SynthesizersDocument6 pagesEvent Driven Analog Modeling For The Verification of PLL Frequency SynthesizersseemabNo ratings yet
- General Purpose Equipment: Me 4053 Mechanical Systems LaboratoryDocument8 pagesGeneral Purpose Equipment: Me 4053 Mechanical Systems Laboratorybill obrienNo ratings yet
- A Low-Cost Hardware-In-The-Loop Real Time Simulation of Control SystemsDocument4 pagesA Low-Cost Hardware-In-The-Loop Real Time Simulation of Control SystemsCarlos de la TorreNo ratings yet
- Sva CDC Paper Dvcon2006Document6 pagesSva CDC Paper Dvcon2006vikkisachdevaNo ratings yet
- Development of Digital Protective Relay Tester Under IEC61850Document5 pagesDevelopment of Digital Protective Relay Tester Under IEC61850violatorNo ratings yet
- Fuzzy microcontroller controls liquid levelDocument6 pagesFuzzy microcontroller controls liquid levelsamyNo ratings yet
- A Hybrid Framework For Fault DetectionDocument10 pagesA Hybrid Framework For Fault DetectionharshaNo ratings yet
- Control Systems U5 (TEL306)Document84 pagesControl Systems U5 (TEL306)Ruvenderan SuburamaniamNo ratings yet
- Design of Ieee 1149.1 Tap Controller Ip CoreDocument12 pagesDesign of Ieee 1149.1 Tap Controller Ip CoreCS & ITNo ratings yet
- Implementing Ball Balancing Beam Using Digital Image Processing and Fuzzy LogicDocument4 pagesImplementing Ball Balancing Beam Using Digital Image Processing and Fuzzy LogicJessica RossNo ratings yet
- Calculations of Frequency Response Functions (FRF) PDFDocument8 pagesCalculations of Frequency Response Functions (FRF) PDFJose PradoNo ratings yet
- 10 1109@tim 2009 2022377 PDFDocument7 pages10 1109@tim 2009 2022377 PDFfahrur rizaNo ratings yet
- Watchdog Timer Using VHDL For Atm System: Gore S.S., Lokhande A.A., Mahajan S.BDocument5 pagesWatchdog Timer Using VHDL For Atm System: Gore S.S., Lokhande A.A., Mahajan S.BRishikesh kumarNo ratings yet
- M. Garcia, A. Barreiro STABILITY OF A NETWORKED CONTROL SYSTEM USINGDocument6 pagesM. Garcia, A. Barreiro STABILITY OF A NETWORKED CONTROL SYSTEM USINGFelix GamarraNo ratings yet
- 10.1007@s00034 020 01521 8Document28 pages10.1007@s00034 020 01521 8Geraud Russel Goune ChenguiNo ratings yet
- Moving Horizon Model Based Control in The Presence of Feedback NoiseDocument3 pagesMoving Horizon Model Based Control in The Presence of Feedback NoiseATSNo ratings yet
- Direct Control and Coordination Using Neural Networks: AbstractDocument12 pagesDirect Control and Coordination Using Neural Networks: AbstractEmilio GarcíaNo ratings yet
- Instituto Tecnológico y de Estudios Superiores de MonterreyDocument24 pagesInstituto Tecnológico y de Estudios Superiores de MonterreyJoseManuelLopezCarmonaNo ratings yet
- PROTECTION PERFORMANCE TESTING IN IEC 61850, Liyang2010Document5 pagesPROTECTION PERFORMANCE TESTING IN IEC 61850, Liyang2010Mohamed Daw HamoudaNo ratings yet
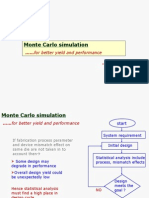
- Monte Carlo Simulation: For Better Yield and PerformanceDocument51 pagesMonte Carlo Simulation: For Better Yield and PerformanceRizwan Shaik PeerlaNo ratings yet
- Digital-Based Optimal AVR Design Using LQR TechniqueDocument13 pagesDigital-Based Optimal AVR Design Using LQR TechniqueHoang Duc ThucNo ratings yet
- A New Interlock System For The Vulcan LaserDocument4 pagesA New Interlock System For The Vulcan LaserMohammad A. BawtagNo ratings yet
- Lab 1Document7 pagesLab 1MoapeNo ratings yet
- Introduction to Digital Control SystemsDocument70 pagesIntroduction to Digital Control SystemsAmruth Thelkar67% (3)
- 3.home AutomationDocument6 pages3.home AutomationI.k. NeenaNo ratings yet
- (Notes) DESIGN FOR TESTABILITYDocument34 pages(Notes) DESIGN FOR TESTABILITYsarathkumarNo ratings yet
- Cadence Monte Carlo Simulation TutorialDocument51 pagesCadence Monte Carlo Simulation Tutorialkuomatt100% (1)
- 1.2 Automatic Load Frequency Control: Department of Electrical Engineering, S.I.E.T, DhenkanalDocument6 pages1.2 Automatic Load Frequency Control: Department of Electrical Engineering, S.I.E.T, DhenkanalManikant MadhusudanNo ratings yet
- Sva CDC Paper Dvcon2006 PDFDocument6 pagesSva CDC Paper Dvcon2006 PDFkrishnaavNo ratings yet
- Reliable True Random Number GeneratorDocument16 pagesReliable True Random Number GeneratorRimon D ChoudhuryNo ratings yet
- Study of Immune Pid Networked Control System Based On TruetimeDocument4 pagesStudy of Immune Pid Networked Control System Based On TruetimeSỹ RonNo ratings yet
- Agilent M9392A PXI Vector Signal Analyzer: Data SheetDocument12 pagesAgilent M9392A PXI Vector Signal Analyzer: Data SheetkienfogNo ratings yet
- PSIM Simulation of DSP-Based Power Electronics ControlDocument6 pagesPSIM Simulation of DSP-Based Power Electronics ControlPasha ZubkovNo ratings yet
- DatasheetDocument3 pagesDatasheetjordanNo ratings yet
- Winbond 25Q64BV PDFDocument61 pagesWinbond 25Q64BV PDFNibiru HercolubusNo ratings yet
- TMRC Mat2 PDFDocument7 pagesTMRC Mat2 PDFjordanNo ratings yet
- DM3 Catalog PDFDocument12 pagesDM3 Catalog PDFjordanNo ratings yet
- Kralev SP IJC2015 PDFDocument27 pagesKralev SP IJC2015 PDFjordanNo ratings yet
- MindstormsDocument69 pagesMindstormsjordanNo ratings yet
- How To Balance A Two-Wheeled RobotDocument48 pagesHow To Balance A Two-Wheeled RobotjordanNo ratings yet
- Model Based System Identification For Hydraulic Deep Drawing PressesDocument11 pagesModel Based System Identification For Hydraulic Deep Drawing PressesjordanNo ratings yet
- Biological PsychiatryDocument7 pagesBiological PsychiatryjordanNo ratings yet
- Bill Williams Chaos TheoryDocument3 pagesBill Williams Chaos TheoryjordanNo ratings yet
- AN2081 Migrating To M25PE From M95 PDFDocument15 pagesAN2081 Migrating To M25PE From M95 PDFjordanNo ratings yet
- Bill Williams Chaos TheoryDocument18 pagesBill Williams Chaos TheoryKhandaker Didar100% (3)
- Internal Processor Which Is Controlled by The External Mix/Select BoxDocument1 pageInternal Processor Which Is Controlled by The External Mix/Select BoxjordanNo ratings yet
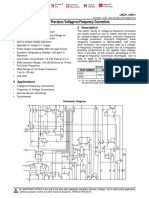
- Lm331 Voltaje A FrecuenciaDocument24 pagesLm331 Voltaje A FrecuenciaLeguel LNo ratings yet
- RCF L-Pad 10c - Manual de Utilizare - 40 PagDocument40 pagesRCF L-Pad 10c - Manual de Utilizare - 40 Pagadriana.36No ratings yet
- Networking Design and Implementation For Bio Tek CompanyDocument24 pagesNetworking Design and Implementation For Bio Tek CompanyDiaconu HerminaNo ratings yet
- Product data sheet for variable speed drive ATV12 - 0.18kW - 0.25hpDocument2 pagesProduct data sheet for variable speed drive ATV12 - 0.18kW - 0.25hpmanas jenaNo ratings yet
- An7511 PDFDocument10 pagesAn7511 PDFVenancio GutierrezNo ratings yet
- Gatelevel ModelingDocument13 pagesGatelevel ModelingGiri ReddyNo ratings yet
- Lecture 2 - Digital TelevisionDocument40 pagesLecture 2 - Digital TelevisionGerald Emmanuel100% (1)
- PA-POS-2OC3 Two-Port Packet-over-SONET Port Adapter Installation and ConfigurationDocument100 pagesPA-POS-2OC3 Two-Port Packet-over-SONET Port Adapter Installation and ConfigurationOscar Suazo SantosNo ratings yet
- MDC-7000 7900 OME Rev06Document244 pagesMDC-7000 7900 OME Rev06pppNo ratings yet
- Introduction To Active and Passive Components: Made By: Prof. Rashmi G. PatilDocument23 pagesIntroduction To Active and Passive Components: Made By: Prof. Rashmi G. Patilrashmi patilNo ratings yet
- RF Plan Tables iPASOLINKDocument31 pagesRF Plan Tables iPASOLINKEr Praveen ThakurNo ratings yet
- Semiconductor Devices and Circuits LaboratoryDocument53 pagesSemiconductor Devices and Circuits LaboratoryKaryampudi RushendrababuNo ratings yet
- Site Acceptance Testing For New Insatllation Activtiy: Sector Addition TDD SRA N FDD 2G Sector AdditionDocument20 pagesSite Acceptance Testing For New Insatllation Activtiy: Sector Addition TDD SRA N FDD 2G Sector AdditionkrishkarnNo ratings yet
- W65C02S Microprocessor Data Sheet: The Western Design Center, IncDocument40 pagesW65C02S Microprocessor Data Sheet: The Western Design Center, IncJayath GayanNo ratings yet
- 9A10505 Principles of CommunicationsDocument4 pages9A10505 Principles of CommunicationssivabharathamurthyNo ratings yet
- IEEE - eTD - CPAT - PRO - (NO VIDEO)Document15 pagesIEEE - eTD - CPAT - PRO - (NO VIDEO)Mohamed Atef Abbas ElsahartyNo ratings yet
- 5 A 0105 EE486 DigitalDocument1 page5 A 0105 EE486 DigitalNagarjuna MalladhiNo ratings yet
- Data Sheet 7KG9501-0AA01-2AA1: Measuring FunctionsDocument4 pagesData Sheet 7KG9501-0AA01-2AA1: Measuring FunctionsPằngPằngChiuChiuNo ratings yet
- A Review Paper On Smart Antenna For Mobile Communication IJERTCONV5IS23014Document2 pagesA Review Paper On Smart Antenna For Mobile Communication IJERTCONV5IS23014Sanjana RameshNo ratings yet
- Chapter 1 - Pic16f887 OverviewDocument38 pagesChapter 1 - Pic16f887 OverviewTung NguyenNo ratings yet
- TCC CATV - e Catalgoue VDocument91 pagesTCC CATV - e Catalgoue VlehongphuNo ratings yet
- Fault Passage IndicatorDocument5 pagesFault Passage Indicatorbibhas_samantaNo ratings yet
- 108 Michaels International Diode Equivalents Guide PDFDocument140 pages108 Michaels International Diode Equivalents Guide PDFFrancisco J. Aguilera HiguereyNo ratings yet
- 002.structured Cabling-Training DocumentsDocument18 pages002.structured Cabling-Training DocumentsSathiya Priya NatrajNo ratings yet
- MBSD0 Lab ManualDocument258 pagesMBSD0 Lab ManualbeimanalfredoNo ratings yet
- Basic Electronics, Volumes 1-5, (1955) - Text PDFDocument570 pagesBasic Electronics, Volumes 1-5, (1955) - Text PDFfrankNo ratings yet
- Datasheet - PDF 2 TriacDocument3 pagesDatasheet - PDF 2 TriacFlabio OliveiraNo ratings yet
- EE 308 Apr. 19, 2002Document12 pagesEE 308 Apr. 19, 2002asprillaNo ratings yet
- Walk-Through Metal Detector Installation ManualDocument44 pagesWalk-Through Metal Detector Installation ManualErick Navarrete50% (2)
- Ep450 Motorola UhfDocument2 pagesEp450 Motorola UhfYusuf SonmezNo ratings yet