You might also like
- Temperaturaminima Tabla PDFDocument1 pageTemperaturaminima Tabla PDFOscar CárdenasNo ratings yet
- Informe Ventiladores - UnalDocument19 pagesInforme Ventiladores - UnalOscar CárdenasNo ratings yet
- Temperaturaminima TablaDocument4 pagesTemperaturaminima TablaOscar CárdenasNo ratings yet
- Cuarto Dual PDFDocument1 pageCuarto Dual PDFOscar CárdenasNo ratings yet
- Datos Presión - OdsDocument11 pagesDatos Presión - OdsOscar CárdenasNo ratings yet
- Taller - 2 011-2)Document1 pageTaller - 2 011-2)PablitoCamelasNo ratings yet
- Informe Del Módulo de ScadaDocument3 pagesInforme Del Módulo de ScadaOscar CárdenasNo ratings yet
- Conduccion UnidimensionalDocument8 pagesConduccion UnidimensionalOscar CárdenasNo ratings yet
- Formato ParadaDocument2 pagesFormato ParadaOscar CárdenasNo ratings yet
- Trabajo FinalDocument1 pageTrabajo FinalOscar CárdenasNo ratings yet
- Informe Laboratorio FisicaDocument15 pagesInforme Laboratorio FisicaOscar CárdenasNo ratings yet
- Modelos Matemáticos - Oscar CárdenasDocument26 pagesModelos Matemáticos - Oscar CárdenasOscar CárdenasNo ratings yet
- Anlisis de Riesgo de Crédito e Indicadores FinancierosDocument101 pagesAnlisis de Riesgo de Crédito e Indicadores FinancierosOscar CárdenasNo ratings yet
- Informe - FotodiodosDocument5 pagesInforme - FotodiodosOscar CárdenasNo ratings yet
- Probabilidad OscarDocument3 pagesProbabilidad OscarOscar CárdenasNo ratings yet
- Taller Elementos FinitosDocument6 pagesTaller Elementos FinitosOscar CárdenasNo ratings yet
- QuizOptimizacion ModelacionMatematica Sem02 2014 V00Document1 pageQuizOptimizacion ModelacionMatematica Sem02 2014 V00Oscar CárdenasNo ratings yet
- Motor NuevoDocument1 pageMotor NuevoOscar CárdenasNo ratings yet
- Ventiladores, Curva de Funcionamiento y Caraterísticas de OperaciónDocument19 pagesVentiladores, Curva de Funcionamiento y Caraterísticas de OperaciónOscar Cárdenas100% (1)
- Quiz2 PDFDocument12 pagesQuiz2 PDFOscar CárdenasNo ratings yet
- Taller Elementos FinitosDocument6 pagesTaller Elementos FinitosOscar CárdenasNo ratings yet
- CojineteDocument10 pagesCojineteOscar CárdenasNo ratings yet
- MCROSINFOIIDocument11 pagesMCROSINFOIIOscar CárdenasNo ratings yet
- Frame 0002Document1 pageFrame 0002Oscar CárdenasNo ratings yet
- Informe 2 2016Document26 pagesInforme 2 2016Oscar CárdenasNo ratings yet
- Parámetros MáquinaDocument1 pageParámetros MáquinaOscar CárdenasNo ratings yet
- Dibujo de MáquinasDocument4 pagesDibujo de MáquinasOscar CárdenasNo ratings yet
- CojineteDocument18 pagesCojineteOscar CárdenasNo ratings yet
- La EutanasiaDocument5 pagesLa EutanasiaOscar CárdenasNo ratings yet
- DeterminantesDocument44 pagesDeterminanteskdpmNo ratings yet
- Investigación de OperacionesDocument14 pagesInvestigación de OperacionesJurley Vasques HernandezNo ratings yet
- Si El Determinante de Una Matriz Es 1Document10 pagesSi El Determinante de Una Matriz Es 1Basilio Meza PalmaNo ratings yet
- Teorema de La DivergenciaDocument8 pagesTeorema de La DivergenciaLeonardo GálvezNo ratings yet
- RixoropuverDocument3 pagesRixoropuverLuis Antonio Diaz RomeroNo ratings yet
- Guã A VectoresDocument3 pagesGuã A VectoresEddie MarinNo ratings yet
- Fuerza y EstaticaDocument19 pagesFuerza y EstaticaGiovani CanoNo ratings yet
- Ejemplo Matricial (Metodo de La Rigidez)Document9 pagesEjemplo Matricial (Metodo de La Rigidez)larsNo ratings yet
- Problemas Vectorial MC E2021Document46 pagesProblemas Vectorial MC E2021Bryan SalazarNo ratings yet
- La Biblia de ShadowlightDocument96 pagesLa Biblia de ShadowlightLucas QuarchioniNo ratings yet
- Actividad 3 ÁlgebraDocument13 pagesActividad 3 ÁlgebraDelfis45% (11)
- Algebra Vectorial Bidimensional y en El EspacioDocument36 pagesAlgebra Vectorial Bidimensional y en El EspacioMauro Ronal Ramos ValdiviaNo ratings yet
- Determinantes y Su Aplicación en La InformáticaDocument9 pagesDeterminantes y Su Aplicación en La InformáticaJuan Carlos Prieto0% (1)
- Examen - (AAB02) Cuestionario 5 - "Espacios Vectoriales" Lectura Comprensiva, Análisis e Interpretación Conceptos y Propiedades de Los Espacios VectorialesDocument4 pagesExamen - (AAB02) Cuestionario 5 - "Espacios Vectoriales" Lectura Comprensiva, Análisis e Interpretación Conceptos y Propiedades de Los Espacios VectorialesJosue DavidNo ratings yet
- Apuntes Curso 2015-2016 Completo PDFDocument1,753 pagesApuntes Curso 2015-2016 Completo PDFezzaxlu100% (1)
- Mat-1103 Practica 1Document4 pagesMat-1103 Practica 1Jhonny Bennington Tapia AquinoNo ratings yet
- Método LU numéricamente estableDocument12 pagesMétodo LU numéricamente estableRicardo Eliel Villarroel MedinaNo ratings yet
- Tarea 4 - Luis - Eduardo - Corrales - Grupo - 159Document16 pagesTarea 4 - Luis - Eduardo - Corrales - Grupo - 159KATTERIN PAOLA ALVEAR MORENONo ratings yet
- So Lucio NarioDocument16 pagesSo Lucio NarioDanilo HilarioNo ratings yet
- TAREA #4 - Yulissa MaradiagaDocument24 pagesTAREA #4 - Yulissa MaradiagaYulissa MaradiagaNo ratings yet
- Matrices y DeterminantesDocument7 pagesMatrices y DeterminantesantonioNo ratings yet
- ÁlgebraDocument9 pagesÁlgebraDavidGonzalezNo ratings yet
- Cálculo Aplicado A VectoresDocument6 pagesCálculo Aplicado A VectoresGirleza Astrid Muñoz CamposNo ratings yet
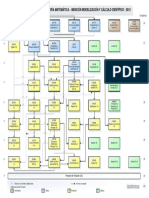
- Malla Curricular Ing Matematica Mencion Modelizacion PDFDocument1 pageMalla Curricular Ing Matematica Mencion Modelizacion PDFbartolome777ooNo ratings yet
- Geometría Del EspacioDocument295 pagesGeometría Del EspacioBrandon StevenNo ratings yet
- Syllabus (19-1) 525156Document6 pagesSyllabus (19-1) 525156micardisNo ratings yet
- Actividades de La Competencia 3Document6 pagesActividades de La Competencia 3Antonio ZamoranoNo ratings yet
- Resolver Sistemas de Ecuaciones Lineales OnlineDocument37 pagesResolver Sistemas de Ecuaciones Lineales OnlineMarcoVazquezNo ratings yet
- Guía de Estudio Completa: Matemáticas Ii (Cc. Ambientales)Document18 pagesGuía de Estudio Completa: Matemáticas Ii (Cc. Ambientales)Pollo 01No ratings yet
- Ensayo Aplicaciones Del Algebra LinealDocument7 pagesEnsayo Aplicaciones Del Algebra LinealAlex Hernandez0% (1)
- Enseñar Matemática hoy: Miradas, sentidos y desafíosFrom EverandEnseñar Matemática hoy: Miradas, sentidos y desafíosRating: 5 out of 5 stars5/5 (1)
- Cuántica: Qué significa la teoría de la ciencia más extrañaFrom EverandCuántica: Qué significa la teoría de la ciencia más extrañaRating: 1 out of 5 stars1/5 (1)
- La Teoría de Conjuntos y los Fundamentos de las MatemáticasFrom EverandLa Teoría de Conjuntos y los Fundamentos de las MatemáticasRating: 5 out of 5 stars5/5 (1)
- El físico y el filósofo: Albert Einstein, Henri Bergson y el debate que cambió nuestra comprensión del tiempoFrom EverandEl físico y el filósofo: Albert Einstein, Henri Bergson y el debate que cambió nuestra comprensión del tiempoNo ratings yet
- Modelamiento y simulación de sistemas con Simulink: Aplicaciones en ingeniería estructuralFrom EverandModelamiento y simulación de sistemas con Simulink: Aplicaciones en ingeniería estructuralRating: 4.5 out of 5 stars4.5/5 (4)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraFrom EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraRating: 4.5 out of 5 stars4.5/5 (5)
- Fundamentos de matemática: Introducción al nivel universitarioFrom EverandFundamentos de matemática: Introducción al nivel universitarioRating: 3 out of 5 stars3/5 (9)
- Física paso a paso: Más de 100 problemas resueltosFrom EverandFísica paso a paso: Más de 100 problemas resueltosRating: 4 out of 5 stars4/5 (12)
- Física y metafísica del espacio y el tiempo: La filosofía en el laboratorioFrom EverandFísica y metafísica del espacio y el tiempo: La filosofía en el laboratorioRating: 5 out of 5 stars5/5 (1)
- La guía definitiva en Matemáticas para el Ingreso al BachilleratoFrom EverandLa guía definitiva en Matemáticas para el Ingreso al BachilleratoRating: 4.5 out of 5 stars4.5/5 (9)
- Análisis estadístico de datos multivariadosFrom EverandAnálisis estadístico de datos multivariadosRating: 5 out of 5 stars5/5 (1)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasFrom EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasRating: 5 out of 5 stars5/5 (4)
- Las ideas fundamentales del Universo: Espacio, tiempo y movimientoFrom EverandLas ideas fundamentales del Universo: Espacio, tiempo y movimientoRating: 3.5 out of 5 stars3.5/5 (3)
- Entrelazamiento cuántico y sincronicidad. Campos de fuerza, no localidad, percepciones extrasensoriales. Las sorprendentes propiedades de la física cuántica.From EverandEntrelazamiento cuántico y sincronicidad. Campos de fuerza, no localidad, percepciones extrasensoriales. Las sorprendentes propiedades de la física cuántica.Rating: 4.5 out of 5 stars4.5/5 (9)
- Introducción al análisis estadístico multivariado aplicado: Experiencia y casos en el Caribe colombianoFrom EverandIntroducción al análisis estadístico multivariado aplicado: Experiencia y casos en el Caribe colombianoRating: 5 out of 5 stars5/5 (2)
- Guía práctica para la refracción ocularFrom EverandGuía práctica para la refracción ocularRating: 5 out of 5 stars5/5 (2)
- NIKOLA TESLA: Mis Inventos - AutobiografiaFrom EverandNIKOLA TESLA: Mis Inventos - AutobiografiaRating: 4.5 out of 5 stars4.5/5 (2)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalFrom EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalRating: 5 out of 5 stars5/5 (3)