You might also like
- Ejercicios Principios Comunicacion SolucionesDocument6 pagesEjercicios Principios Comunicacion SolucionesAlejandro RodríguezNo ratings yet
- LMF Pract.7 Punto de Operacion de Una Bomba CentrifugaDocument6 pagesLMF Pract.7 Punto de Operacion de Una Bomba CentrifugaHectorFernandoArcosPerez100% (2)
- Informe Final Algoritmos1Document81 pagesInforme Final Algoritmos1Jhonathan Harold Valdivia EscobarNo ratings yet
- Captaciones Con Rejilla de FondoDocument32 pagesCaptaciones Con Rejilla de FondoSan Brito Mena100% (1)
- Procedimiento Calibración Ventilador Mecánico InvasivoDocument2 pagesProcedimiento Calibración Ventilador Mecánico InvasivoAmmin Dada75% (4)
- Construcción de Un Transformador Toroidal CaseroDocument7 pagesConstrucción de Un Transformador Toroidal CaseroJuan Jose PerezNo ratings yet
- 1.5.7 Packet Tracer - Network Representation - Es XLDocument3 pages1.5.7 Packet Tracer - Network Representation - Es XLArtemisa300No ratings yet
- 1252 1251 1 PBDocument20 pages1252 1251 1 PBCu Qui ToNo ratings yet
- Sistemas de Control Automatico Benjamin C Kuo PDFDocument932 pagesSistemas de Control Automatico Benjamin C Kuo PDFJesus Antonio CegarraNo ratings yet
- Calculo de Transformadores (Saber Electronica) PDFDocument6 pagesCalculo de Transformadores (Saber Electronica) PDFnarutoNo ratings yet
- Tema2 PRACTICASELECTRONICAANALOGICADocument21 pagesTema2 PRACTICASELECTRONICAANALOGICAChema VillalbaNo ratings yet
- Instrucciones Armado TransformadorDocument10 pagesInstrucciones Armado Transformadorgbs88100% (1)
- Diodos RectificadoresDocument6 pagesDiodos RectificadoresAndres Ivan SarmientoNo ratings yet
- Ejercicios de Repaso 1, Teoría de Líneas de TransmisiónDocument7 pagesEjercicios de Repaso 1, Teoría de Líneas de TransmisiónRicardo Alejos75% (16)
- Circuito de NocheDocument17 pagesCircuito de NocheJhon Rodriguez VsquezNo ratings yet
- Funcionamiento MultimetroDocument4 pagesFuncionamiento MultimetropiscobarNo ratings yet
- Sistema Internacional de Unidades PDFDocument8 pagesSistema Internacional de Unidades PDFzcaramusNo ratings yet
- Transformador Ley FaradayDocument2 pagesTransformador Ley FaradayIngrid Julieth Parra SilvaNo ratings yet
- Condensadores PDFDocument6 pagesCondensadores PDFMidori OvNo ratings yet
- El Transistor PDFDocument6 pagesEl Transistor PDFVarinuk Na NanukNo ratings yet
- EadDocument7 pagesEadElmer Escobar RomeroNo ratings yet
- Electronica AnalogicaDocument16 pagesElectronica AnalogicaDavid Gonzalez RomeroNo ratings yet
- Ejercicios Lineas y DB - Rev3 - Con - RespuestasDocument5 pagesEjercicios Lineas y DB - Rev3 - Con - RespuestasEsteban Mejia ArenasNo ratings yet
- Ejercicios Ley de OhmDocument10 pagesEjercicios Ley de OhmPEHUEN34No ratings yet
- EC-2322 Carta de SmithDocument8 pagesEC-2322 Carta de SmithBryanHernandezNo ratings yet
- Presentacion Lineas Transmision Terminadas PDFDocument57 pagesPresentacion Lineas Transmision Terminadas PDFjorge perezNo ratings yet
- Guia de Funciones Kxns500Document560 pagesGuia de Funciones Kxns500Rgz Rmrz OskrNo ratings yet
- Panasonic TES824Document286 pagesPanasonic TES824Flavio FernandezNo ratings yet
- Manual Del Usuario PDFDocument400 pagesManual Del Usuario PDFAnitz FuentesNo ratings yet
- Barrera Ramos, Milron Renato, García Rivera, Francisco RafaelDocument126 pagesBarrera Ramos, Milron Renato, García Rivera, Francisco RafaelPaul Sebastian Vasquez100% (1)
- Manual Panasonic TES824Document104 pagesManual Panasonic TES824Lorena HernandezNo ratings yet
- NS500 Manual de InstalacionDocument322 pagesNS500 Manual de InstalacionCarlos Ureña100% (5)
- 1.1 Introducción A Sistemas de TelefoníaDocument4 pages1.1 Introducción A Sistemas de TelefoníaJuan Jose PerezNo ratings yet
- Multiplexaje Primario PCMDocument4 pagesMultiplexaje Primario PCMAlan AguilarNo ratings yet
- Transporte de SedimentosDocument26 pagesTransporte de SedimentosLau Lawis MartNo ratings yet
- Generalidades Del ProyectoDocument6 pagesGeneralidades Del ProyectoL Meli P SaenzNo ratings yet
- Primer Taller de HidráulicaDocument5 pagesPrimer Taller de HidráulicaANDRESNo ratings yet
- El Transistor de Unión Bipolar BJTDocument29 pagesEl Transistor de Unión Bipolar BJTEnderNo ratings yet
- Máquinas de Inducción y de Corriente DirectaDocument15 pagesMáquinas de Inducción y de Corriente DirectaBryan ArturoNo ratings yet
- 11 Script BDEmpleadosDocument2 pages11 Script BDEmpleadosFrank PerezNo ratings yet
- LookAhead Semana N°28 26.01.2020 - 15.02.2020Document29 pagesLookAhead Semana N°28 26.01.2020 - 15.02.2020Johnny QuenallataNo ratings yet
- CI-1314 Parallel Query 1Document32 pagesCI-1314 Parallel Query 1Giovanni BolañosNo ratings yet
- Fallas de PavimentosDocument13 pagesFallas de PavimentosKelly Franshesca Pinto ParedesNo ratings yet
- Daño A La FormacionDocument40 pagesDaño A La FormacionGeorgina RondaniniNo ratings yet
- s11 Virtual Reporte Momento de InerciaDocument5 pagess11 Virtual Reporte Momento de InerciaAlison jsmNo ratings yet
- Camal de Carhuaz Final PDFDocument23 pagesCamal de Carhuaz Final PDFGodofredo Frank Cilio Celmi100% (1)
- Laboratorio-04 Ensayo MetalograficoDocument20 pagesLaboratorio-04 Ensayo MetalograficochristianNo ratings yet
- Método Tyn y Calus (Mecanismos de Transferencia)Document8 pagesMétodo Tyn y Calus (Mecanismos de Transferencia)Eloisa Infinite50% (2)
- Importancia de Los Cajeros Automáticos en El Sistema Financiero MundialDocument1 pageImportancia de Los Cajeros Automáticos en El Sistema Financiero MundialAna LuisaNo ratings yet
- Grupo 2 Sistema de Evaporacion InundadoDocument2 pagesGrupo 2 Sistema de Evaporacion InundadoDiana Malqui RomeroNo ratings yet
- NTD Ia 008Document5 pagesNTD Ia 008ecocadecNo ratings yet
- Yeso ConceptoDocument4 pagesYeso ConceptoCristhel CastromonteNo ratings yet
- Casos de ArmazonesDocument8 pagesCasos de ArmazonesDiegoUrbinaSanchezNo ratings yet
- Cuotas de Disco PDFDocument10 pagesCuotas de Disco PDFPatricio Farinango100% (1)
- Reporte de Laboratorio - ElectroquímicaDocument7 pagesReporte de Laboratorio - ElectroquímicaBrandom Rydber ArcanaNo ratings yet
- Oceanografía Fisica y Estudio Del MarDocument5 pagesOceanografía Fisica y Estudio Del MarFer MedinaNo ratings yet
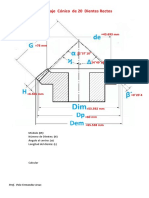
- Engranaje Cónico de 20 Dientes Recto1Document2 pagesEngranaje Cónico de 20 Dientes Recto1Jesus Polo FernandezNo ratings yet
- Reglamento Interno Del Taller MecánicoDocument1 pageReglamento Interno Del Taller MecánicoSilvia Donaji Marin VicenteNo ratings yet
- Direccion Hidraulica b11rDocument8 pagesDireccion Hidraulica b11rEnrique S. SanchezNo ratings yet