You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Isuzu NPR - NPR HD - NQR Commercial Truck Tiltmaster Service Manual Supplement 2003Document215 pagesIsuzu NPR - NPR HD - NQR Commercial Truck Tiltmaster Service Manual Supplement 2003Erasmo Israel Garcia Ochoa100% (4)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- 2011 Chevrolet Cruze LT Diagramas Electricos LibroDocument78 pages2011 Chevrolet Cruze LT Diagramas Electricos LibroJhonny Torralba78% (18)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Hybrid Auxiliary and High-Voltage BatteriesDocument58 pagesHybrid Auxiliary and High-Voltage BatteriesErasmo Israel Garcia Ochoa100% (1)
- Hybrid Auxiliary and High-Voltage BatteriesDocument58 pagesHybrid Auxiliary and High-Voltage BatteriesErasmo Israel Garcia Ochoa100% (1)
- Christmas Around the WorldDocument16 pagesChristmas Around the WorldVioleta Veljanovska100% (1)
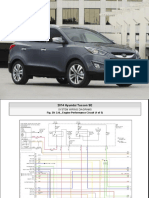
- Hyundai Tucson DIAGRAMA ELECTRICO PDFDocument6 pagesHyundai Tucson DIAGRAMA ELECTRICO PDFErasmo Israel Garcia Ochoa100% (6)
- Variable Camshaft Timing - Variable Valve TimingDocument85 pagesVariable Camshaft Timing - Variable Valve TiminglibertyplusNo ratings yet
- Surface Roughness Measurement - MitutoyoDocument2 pagesSurface Roughness Measurement - MitutoyoSelvaraj BalasundramNo ratings yet
- Specimen 1 ValuationDocument17 pagesSpecimen 1 ValuationLight BearerNo ratings yet
- Project Cash FlowsDocument2 pagesProject Cash FlowsAdarsh Chhajed20% (5)
- Proteccion Contra Sobretensiones PDFDocument84 pagesProteccion Contra Sobretensiones PDFgilbertomjcNo ratings yet
- BRYAN SCHWAB HARRY DODSON - ACCELERATED TESTING - A Practitioner's Guide To Accelerated and Reliability testing.-SAE SOC OF AUTOMOTIVE ENG (2021) PDFDocument252 pagesBRYAN SCHWAB HARRY DODSON - ACCELERATED TESTING - A Practitioner's Guide To Accelerated and Reliability testing.-SAE SOC OF AUTOMOTIVE ENG (2021) PDFErasmo Israel Garcia OchoaNo ratings yet
- Immobilizer System Operation: Ford Ranger Security SystemDocument1 pageImmobilizer System Operation: Ford Ranger Security SystemErasmo Israel Garcia OchoaNo ratings yet
- Reliability Prediction of The Fatigue Life of A Crankshaft PDFDocument4 pagesReliability Prediction of The Fatigue Life of A Crankshaft PDFErasmo Israel Garcia OchoaNo ratings yet
- Controlled Direct Injection System OverviewDocument56 pagesControlled Direct Injection System OverviewErasmo Israel Garcia OchoaNo ratings yet
- Ford Ranger Vehicle Security System GuideDocument1 pageFord Ranger Vehicle Security System GuideErasmo Israel Garcia OchoaNo ratings yet
- 2007 Ranger Vehicle Security8Document1 page2007 Ranger Vehicle Security8Erasmo Israel Garcia OchoaNo ratings yet
- Reliability Prediction of The Fatigue Life of A Crankshaft PDFDocument4 pagesReliability Prediction of The Fatigue Life of A Crankshaft PDFErasmo Israel Garcia OchoaNo ratings yet
- Direct Inyector SystemDocument35 pagesDirect Inyector SystemErasmo Israel Garcia OchoaNo ratings yet
- Simulation of Flow Field Manifold For PEM Fuel CellDocument8 pagesSimulation of Flow Field Manifold For PEM Fuel CellErasmo Israel Garcia OchoaNo ratings yet
- A Scope For The Research and Development Activities On Electric Vehicle Technology in Pune City PDFDocument8 pagesA Scope For The Research and Development Activities On Electric Vehicle Technology in Pune City PDFErasmo Israel Garcia OchoaNo ratings yet
- Controlled Direct Injection System OverviewDocument56 pagesControlled Direct Injection System OverviewErasmo Israel Garcia OchoaNo ratings yet
- The Effect of Nozzle Geometry Over The Evaporative Spray Formation PDFDocument16 pagesThe Effect of Nozzle Geometry Over The Evaporative Spray Formation PDFErasmo Israel Garcia OchoaNo ratings yet
- Direct Inyector SystemDocument35 pagesDirect Inyector SystemErasmo Israel Garcia OchoaNo ratings yet
- Direct Inyector SystemDocument35 pagesDirect Inyector SystemErasmo Israel Garcia OchoaNo ratings yet
- Bond Graph Modeling of Automotive Transmissions and DrivelinesDocument6 pagesBond Graph Modeling of Automotive Transmissions and DrivelinesBen FahNo ratings yet
- E Product Brochure Gasoline Direct Injection PDFDocument41 pagesE Product Brochure Gasoline Direct Injection PDFCatalin VisoschiNo ratings yet
- Pinout Tablero Haval m4Document1 pagePinout Tablero Haval m4Erasmo Israel Garcia OchoaNo ratings yet
- Pinout Tablero Haval m4Document1 pagePinout Tablero Haval m4Erasmo Israel Garcia OchoaNo ratings yet
- 1073 01 Wai A5 Te ML Wai1000 Operating InstructionsDocument104 pages1073 01 Wai A5 Te ML Wai1000 Operating InstructionsErasmo Israel Garcia Ochoa100% (1)
- Pinout at Haval M4 PDFDocument4 pagesPinout at Haval M4 PDFErasmo Israel Garcia OchoaNo ratings yet
- NISSAN Urvan Gasolina 2008 Al 2014 PDFDocument47 pagesNISSAN Urvan Gasolina 2008 Al 2014 PDFErasmo Israel Garcia OchoaNo ratings yet
- Pinout at Haval M4 PDFDocument4 pagesPinout at Haval M4 PDFErasmo Israel Garcia OchoaNo ratings yet
- ECM Terminal Layout and Reference ValuesDocument8 pagesECM Terminal Layout and Reference ValuesNelson Cacahuate PowerDanceeNo ratings yet
- Calculator For SW Density Changes - Effect of List On Ships DraftDocument3 pagesCalculator For SW Density Changes - Effect of List On Ships DraftHein Thurein KyawNo ratings yet
- Alternator NotesDocument24 pagesAlternator Notesarunima arunimaNo ratings yet
- Operational Transconductance Amplifier ThesisDocument6 pagesOperational Transconductance Amplifier ThesislaurahallportlandNo ratings yet
- Unit-2 Final KshitijDocument108 pagesUnit-2 Final KshitijShubham JainNo ratings yet
- 3-Ph Induction MotorDocument246 pages3-Ph Induction MotorAn00pgadzillaNo ratings yet
- Sensing System Assisted Novel PID Controller For Efficient Speed Control of DC MDocument4 pagesSensing System Assisted Novel PID Controller For Efficient Speed Control of DC Mu2005044No ratings yet
- Operating Systems: Chapter 3: DeadlocksDocument46 pagesOperating Systems: Chapter 3: DeadlocksManoel Katlib100% (1)
- Resultados de La Web: GDDS - Traducción Al Español - Ejemplos Inglés - Reverso ..Document3 pagesResultados de La Web: GDDS - Traducción Al Español - Ejemplos Inglés - Reverso ..Jo PaterninaNo ratings yet
- Chocolate - Useful Physical ConstantsDocument2 pagesChocolate - Useful Physical ConstantsJuan CNo ratings yet
- Poisoning: Selenium in LivestockDocument4 pagesPoisoning: Selenium in Livestockdianarbk otuNo ratings yet
- Ross 308 AP Broiler PO2019-EN PDFDocument16 pagesRoss 308 AP Broiler PO2019-EN PDFJORGE GALVISNo ratings yet
- Chinkon Kishin - Origens Shintoístas Do Okiyome e Do Espiritismo Na MahikariDocument2 pagesChinkon Kishin - Origens Shintoístas Do Okiyome e Do Espiritismo Na MahikariGauthier Alex Freitas de Abreu0% (1)
- Sherco 450 Se R Workshop Manual 1Document79 pagesSherco 450 Se R Workshop Manual 1miguelNo ratings yet
- Xoro Hrs 8540 HD Sat ReceiverDocument33 pagesXoro Hrs 8540 HD Sat ReceiverPinoNo ratings yet
- Name: Amir Bin Rossaifuddin Id: 2016307153 Group: Emd2M2ADocument2 pagesName: Amir Bin Rossaifuddin Id: 2016307153 Group: Emd2M2AamirossaifuddinNo ratings yet
- Pharmaceutics | Water Solubility and Dissolution RateDocument11 pagesPharmaceutics | Water Solubility and Dissolution RateAnnisa AgustinaNo ratings yet
- 4TWX4036 Service FactsDocument4 pages4TWX4036 Service FactsAlejandro OrdoñezNo ratings yet
- WIP CaseStudyDocument3 pagesWIP CaseStudypaul porrasNo ratings yet
- RLCraft v2.9 ChangelogDocument28 pagesRLCraft v2.9 ChangelogSơn TrươngNo ratings yet
- Ratana Outdoor FurnitureDocument107 pagesRatana Outdoor FurnitureNova TechieNo ratings yet
- General Biology 2: Quarter 3, Module 1 Genetic EngineeringDocument20 pagesGeneral Biology 2: Quarter 3, Module 1 Genetic EngineeringRonalyn AndaganNo ratings yet
- Personal Care Na Hair GuideDocument8 pagesPersonal Care Na Hair GuideIsabellaNo ratings yet
- Error Correction - Test 1Document4 pagesError Correction - Test 1phucnguyen0429No ratings yet
- AkzoNobel-Trigonox 239Document6 pagesAkzoNobel-Trigonox 239Wafa AjiliNo ratings yet
- TRUKE C20-33(35)L CLARK ENGINE PARTS LISTDocument2 pagesTRUKE C20-33(35)L CLARK ENGINE PARTS LISTРоман ПетровNo ratings yet