You might also like
- The 21 Irrefutable Laws of Leadership by John MaxwellDocument10 pagesThe 21 Irrefutable Laws of Leadership by John MaxwellRemus Romano ReyesNo ratings yet
- Marcel Breuer: Hungarian-American Designer, Architect and Bauhaus PioneerDocument8 pagesMarcel Breuer: Hungarian-American Designer, Architect and Bauhaus PioneerYosaphat Kiko Paramore DiggoryNo ratings yet
- The Judicial Affidavit RuleDocument20 pagesThe Judicial Affidavit RuleMhay ReyesNo ratings yet
- Managerial Accounting and Cost ConceptsDocument67 pagesManagerial Accounting and Cost ConceptsTristan AdrianNo ratings yet
- Sample Cover Letter Oil and GasDocument1 pageSample Cover Letter Oil and GasNadira Aqilah67% (3)
- Kinetics of Acetone Hydrogenation For Synthesis of Isopropyl Alcohol Over Cu-Al Mixed Oxide CatalystsDocument9 pagesKinetics of Acetone Hydrogenation For Synthesis of Isopropyl Alcohol Over Cu-Al Mixed Oxide Catalysts李国俊No ratings yet
- Reloading SMDocument10 pagesReloading SMapi-397509789No ratings yet
- UnloadrecyclingDocument11 pagesUnloadrecyclingapi-438120791No ratings yet
- FaceoffsmDocument16 pagesFaceoffsmapi-397492879No ratings yet
- Linefollowing SMDocument9 pagesLinefollowing SMapi-397509789No ratings yet
- UnloadtrashDocument10 pagesUnloadtrashapi-438120791No ratings yet
- GamehsmDocument9 pagesGamehsmapi-438120791No ratings yet
- OffensesmDocument11 pagesOffensesmapi-397492879No ratings yet
- RefcommsmDocument9 pagesRefcommsmapi-397492879No ratings yet
- GameplaycDocument5 pagesGameplaycapi-397509789No ratings yet
- Actionmachine CDocument6 pagesActionmachine Capi-272643960No ratings yet
- RefserviceDocument10 pagesRefserviceapi-397509789No ratings yet
- Drs CDocument10 pagesDrs Capi-272643960No ratings yet
- PlayserviceDocument14 pagesPlayserviceapi-397509789No ratings yet
- GamemastersmDocument12 pagesGamemastersmapi-397492879No ratings yet
- ShootingcDocument7 pagesShootingcapi-397509789No ratings yet
- Location CDocument13 pagesLocation Capi-272643960No ratings yet
- MotorserviceDocument8 pagesMotorserviceapi-397509789No ratings yet
- NavtoshootreloadsmDocument4 pagesNavtoshootreloadsmapi-398062839No ratings yet
- FaceoffnavDocument7 pagesFaceoffnavapi-398062839No ratings yet
- "ES - Configure.h" "ES - Framework.h" "TVS.H" "Inputs.h" "UART.h" "OPAMP.h"Document6 pages"ES - Configure.h" "ES - Framework.h" "TVS.H" "Inputs.h" "UART.h" "OPAMP.h"api-552271981No ratings yet
- Sendcommand CDocument8 pagesSendcommand Capi-272643960100% (1)
- "ES - Configure.h" "ES - Framework.h" "ZENER.h" "Inputs.h" "OPAMP.h"Document9 pages"ES - Configure.h" "ES - Framework.h" "ZENER.h" "Inputs.h" "OPAMP.h"api-552271981No ratings yet
- LinefollowingsmDocument8 pagesLinefollowingsmapi-398062839No ratings yet
- Ballshooting CDocument7 pagesBallshooting Capi-272643960No ratings yet
- TeramotorserviceDocument4 pagesTeramotorserviceapi-384495602No ratings yet
- LeafsmDocument7 pagesLeafsmapi-438010548No ratings yet
- ButtondbDocument5 pagesButtondbapi-532411015No ratings yet
- EventcheckersDocument4 pagesEventcheckersapi-438010548No ratings yet
- DefenseDocument6 pagesDefenseapi-398062839No ratings yet
- Mastermachine CDocument4 pagesMastermachine Capi-272643960No ratings yet
- UartDocument18 pagesUartapi-552271981No ratings yet
- Code ListingsDocument61 pagesCode Listingsethannash3No ratings yet
- IdleDocument3 pagesIdleapi-385142684No ratings yet
- ReloadstatemachineDocument7 pagesReloadstatemachineapi-398062839100% (1)
- "ES - Configure.h" "ES - Framework.h" "Car.h" "PWM16Tiva.h" "Inc/hw - Memmap.h" "Inc/hw - Types.h" "Inc/hw - Gpio.h" "Inc/hw - Sysctl.h"Document10 pages"ES - Configure.h" "ES - Framework.h" "Car.h" "PWM16Tiva.h" "Inc/hw - Memmap.h" "Inc/hw - Types.h" "Inc/hw - Gpio.h" "Inc/hw - Sysctl.h"api-385142684No ratings yet
- ShootingsmDocument6 pagesShootingsmapi-398062839No ratings yet
- "Es - Configure.H" "Es - Framework.H" "Gameplay.H" "Enemyship.H" "Projectile.H" "Spaceship.H" "Updateoled.H" "Dotstarservice.H"Document9 pages"Es - Configure.H" "Es - Framework.H" "Gameplay.H" "Enemyship.H" "Projectile.H" "Spaceship.H" "Updateoled.H" "Dotstarservice.H"api-532411015No ratings yet
- TrexDocument10 pagesTrexapi-385142684No ratings yet
- Enemyship 2Document12 pagesEnemyship 2api-532411015No ratings yet
- TimeDocument9 pagesTimeapi-385142684No ratings yet
- Pesudo CodeDocument22 pagesPesudo Codeapi-311007633No ratings yet
- "Es - Configure.H" "Es - Framework.H" "Timingmotor.H" "Pwm10Tiva.H" "Bitdefs.H" "Definitions.H"Document5 pages"Es - Configure.H" "Es - Framework.H" "Timingmotor.H" "Pwm10Tiva.H" "Bitdefs.H" "Definitions.H"api-340769184No ratings yet
- Mastersm CDocument8 pagesMastersm Capi-310813713No ratings yet
- VisualblastsmDocument5 pagesVisualblastsmapi-438010548No ratings yet
- Event Checkers CodeDocument6 pagesEvent Checkers Codeapi-272643960No ratings yet
- Drivealongtrailsm CDocument5 pagesDrivealongtrailsm Capi-310813713No ratings yet
- UdfDocument6 pagesUdfmujikagNo ratings yet
- PopupmotorserviceDocument4 pagesPopupmotorserviceapi-384495602No ratings yet
- GamesmDocument12 pagesGamesmapi-438010548No ratings yet
- FanserviceDocument4 pagesFanserviceapi-384495602No ratings yet
- SpaceshipDocument6 pagesSpaceshipapi-532411015No ratings yet
- Kalman CDocument7 pagesKalman CcartamenesNo ratings yet
- UDF ExamplesDocument5 pagesUDF ExamplesRashed KaiserNo ratings yet
- PopupbuttonDocument5 pagesPopupbuttonapi-384495602No ratings yet
- "ES - Configure.h" "ES - Framework.h" "OPAMP.h" "UART.h" "Inputs.h"Document6 pages"ES - Configure.h" "ES - Framework.h" "OPAMP.h" "UART.h" "Inputs.h"api-552271981No ratings yet
- SpihsmDocument26 pagesSpihsmapi-438120791No ratings yet
- ZenerDocument13 pagesZenerapi-531846547No ratings yet
- Bind4 For C ProgrammingDocument13 pagesBind4 For C Programmingkriss.solankiNo ratings yet
- BE EXPERT IN JAVA Part- 2: Learn Java programming and become expertFrom EverandBE EXPERT IN JAVA Part- 2: Learn Java programming and become expertNo ratings yet
- Offensesm PseudocodeDocument2 pagesOffensesm Pseudocodeapi-397492879No ratings yet
- LedspDocument1 pageLedspapi-397492879No ratings yet
- DefensesmpDocument3 pagesDefensesmpapi-397492879No ratings yet
- ServomotorpDocument2 pagesServomotorpapi-397492879No ratings yet
- BeaconpDocument3 pagesBeaconpapi-397492879No ratings yet
- Drivedcmotors PseudocodeDocument4 pagesDrivedcmotors Pseudocodeapi-3974928790% (1)
- ReloadsensorpDocument4 pagesReloadsensorpapi-397492879No ratings yet
- RefcommsmpDocument4 pagesRefcommsmpapi-397492879No ratings yet
- LedsDocument1 pageLedsapi-397492879No ratings yet
- DcmotorDocument1 pageDcmotorapi-397492879No ratings yet
- FaceoffsmpDocument8 pagesFaceoffsmpapi-397492879No ratings yet
- OffensesmDocument11 pagesOffensesmapi-397492879No ratings yet
- DcmotorDocument15 pagesDcmotorapi-397492879No ratings yet
- GamemastersmpDocument6 pagesGamemastersmpapi-397492879No ratings yet
- DefensesmDocument1 pageDefensesmapi-397492879No ratings yet
- BeaconDocument5 pagesBeaconapi-397492879No ratings yet
- OffensesmDocument1 pageOffensesmapi-397492879No ratings yet
- LedsDocument3 pagesLedsapi-397492879No ratings yet
- RefcommsmDocument1 pageRefcommsmapi-397492879No ratings yet
- ReloadsensorDocument1 pageReloadsensorapi-397492879No ratings yet
- ReloadsensorDocument6 pagesReloadsensorapi-397492879No ratings yet
- GamemastersmDocument1 pageGamemastersmapi-397492879No ratings yet
- FaceoffsmDocument1 pageFaceoffsmapi-397492879No ratings yet
- BeaconDocument1 pageBeaconapi-397492879No ratings yet
- ServomotorDocument1 pageServomotorapi-397492879No ratings yet
- ServomotorDocument4 pagesServomotorapi-397492879No ratings yet
- GamemastersmDocument12 pagesGamemastersmapi-397492879No ratings yet
- RefcommsmDocument9 pagesRefcommsmapi-397492879No ratings yet
- An - APX18 206516L CT0Document2 pagesAn - APX18 206516L CT0Maria MartinsNo ratings yet
- E. Market Size PotentialDocument4 pagesE. Market Size Potentialmesadaeterjohn.studentNo ratings yet
- Different Aids For TeachingDocument19 pagesDifferent Aids For TeachingPrecious CabarseNo ratings yet
- 1st WeekDocument89 pages1st Weekbicky dasNo ratings yet
- Dhilshahilan Rajaratnam: Work ExperienceDocument5 pagesDhilshahilan Rajaratnam: Work ExperienceShazard ShortyNo ratings yet
- Loctite 270™: Technical Data SheetDocument4 pagesLoctite 270™: Technical Data SheetM Jobayer AzadNo ratings yet
- Macroeconomics Canadian 8th Edition Sayre Solutions Manual 1Document9 pagesMacroeconomics Canadian 8th Edition Sayre Solutions Manual 1tyrone100% (52)
- University of The West of England (Uwe) : Bristol Business School MSC Management (International Human Resource Management)Document5 pagesUniversity of The West of England (Uwe) : Bristol Business School MSC Management (International Human Resource Management)Olusegun_Spend_3039No ratings yet
- CPWD Contractor Enlistment Rules 2005 SummaryDocument71 pagesCPWD Contractor Enlistment Rules 2005 Summaryvikky717No ratings yet
- Feb 21Document8 pagesFeb 21thestudentageNo ratings yet
- Tối Ưu Hóa Cho Khoa Học Dữ LiệuDocument64 pagesTối Ưu Hóa Cho Khoa Học Dữ Liệuminhpc2911No ratings yet
- Optimization TheoryDocument18 pagesOptimization TheoryDivine Ada PicarNo ratings yet
- 2017 Advanced Computer Networks Homework 1Document6 pages2017 Advanced Computer Networks Homework 1Fadhli RahimNo ratings yet
- Motorola l6Document54 pagesMotorola l6Marcelo AriasNo ratings yet
- Frito LaysDocument6 pagesFrito LaysElcamino Torrez50% (2)
- Nikita Project 01-06-2016Document38 pagesNikita Project 01-06-2016Shobhit GoswamiNo ratings yet
- MONETARY POLICY OBJECTIVES AND APPROACHESDocument2 pagesMONETARY POLICY OBJECTIVES AND APPROACHESMarielle Catiis100% (1)
- 7 ways to improve energy efficiency of pumpsDocument1 page7 ways to improve energy efficiency of pumpsCharina Malolot VillalonNo ratings yet
- Chpter 06 QuizDocument3 pagesChpter 06 QuizGall AnonimNo ratings yet
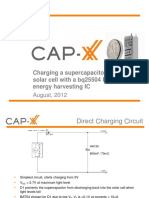
- 1208 CAP XX Charging A Supercapacitor From A Solar Cell PDFDocument12 pages1208 CAP XX Charging A Supercapacitor From A Solar Cell PDFmehralsmenschNo ratings yet
- Vaccination Management System of Brgy 6 (Table of Contents)Document8 pagesVaccination Management System of Brgy 6 (Table of Contents)Ryan Christian MenorNo ratings yet
- HTTP://WWW - Authorstream.com/presentation/kunalcmehta 1123128 Exim PolicyDocument2 pagesHTTP://WWW - Authorstream.com/presentation/kunalcmehta 1123128 Exim PolicyPranesh KumarNo ratings yet
- Instructions Manual Skatey 150/250/400/600Document19 pagesInstructions Manual Skatey 150/250/400/600Denys GavrylovNo ratings yet
- Piroxicam (Wikipedia)Document4 pagesPiroxicam (Wikipedia)Adrian ArnasaputraNo ratings yet